




Mikroelektronika d.o.o.
DeviceDrive Click Board™
DeviceDrive Click Board™
SKU: MIKROE-3663
Couldn't load pickup availability




Key Features
Overview
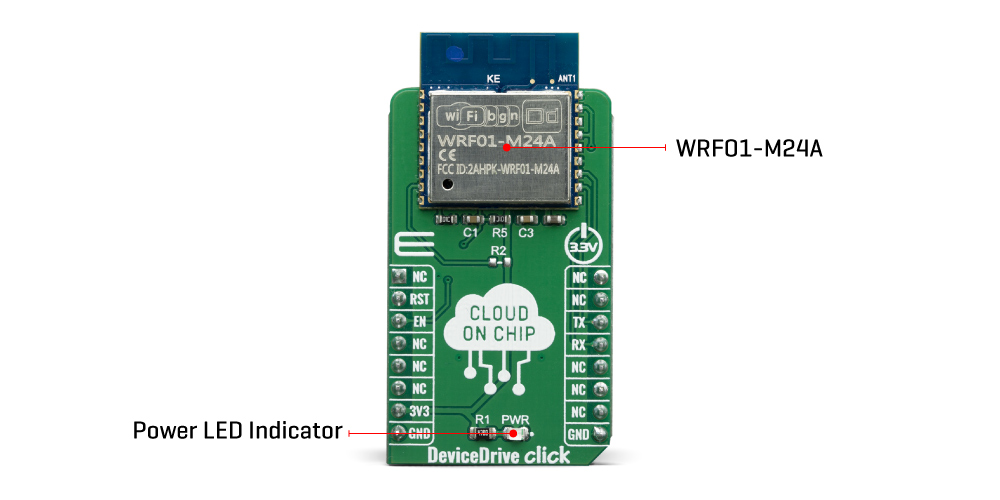
The DeviceDrive Click Board™ is a complete Cloud-on-Module solution with Wi-Fi functionality and an integrated PCB antenna. The onboard WRF01-M24A module comes preloaded with DeviceDrive firmware which completely offloads Wi-Fi networking functionality from the application processor and enables features like OTA upgrade, automatic connection to the DeviceDrive Cloud and Mobile App. Each DeviceDrive Click Board™ board is coming with the FREE activation for your complete development and test of your application.
The WRF01-M24A module uses the UART interface (with JSON command format) for communication with external devices. With this board, you are getting FREE of charge access to the Mobile App, Cloud IoT-Hub, and WRF01 Firmware for testing your idea.
Downloads
The board is based on a WiFi (802.11B/G/N) module from company Devicedrive with ready Firmware, which enables a plug & play Smart onboarding. In addition, you can use the Devicedrive Playground APP and Cloud for FREE for your application R&D. When your application is developed/tested, you can deal with Devicedrive to use your own Cloud or let Devicedrive help you to build your own Azure Cloud.
If you are interested to know how to start IoT development with the DeviceDrive Click Board™ and WRF01 Client Simulator, feel free to read our DeviceDrive Click Board™ User Manual.
The DeviceDrive click is a low-cost Cloud enabler device with extremely simple software integration, that will allow you an instant connection to the DeviceDrive Cloud. The WRF01-M24A module is equipped with low power MCU that runs the WiFi stack (not available for host-applications). The WRF01 provides unsurpassed ability to embed Wi-Fi capabilities into devices with the lowest cost, and minimal space requirement. The WRF01 has been designed for mobile electronics and Internet of Things (IoT) applications. The aim is to achieve the lowest power consumption possible with a combination of several proprietary techniques and very few components.
How Does The DeviceDrive Click Board™ Work?
The DeviceDrive Click Board™ is equipped with the WRF01-M24A a 802.11b/g/n module, specially programmed by the DeviceDrive company to enable direct connection to their Cloud. The module has integrated Tensilica Diamond L106 32bit cache-less microcontroller, which features extra low power consumption and like that is perfectly suited for the battery powered IoT applications.
The WRF01-M24A module handles all connectivity issues so that your device can simply send JSON on the UART and get reply from your selected cloud solution. The function of the WRF01-M24A is to work as a Wi-Fi adapter between your application and Cloud trough simple UART serial connectivity for commands and cloud transmissions. The WRF01 is a part of the DeviceDrive Smart Connectivity Platform (DDCP); a set of high performance, high integration wireless SOCs, designed for space and power constrained mobile platform designers.
In order to enable easies testing of the WRF01 module and Cloud solution, DeviceDrives offers also WRF01 Client Simulator. The program communicates with the WRF01 trough the serial ports and is suited for acting as a client and for prototyping IoT-Products.
For more information about DeviceDrive Cloud, WRF01 specifications and Client Simulator please visit their official page Downloads section.
The WRF01 comes with a LinkUp™ SDK for Android for easy Wi-Fi setup using HTTP/SSL. The LinkUp™ software takes care of all the complexity of connecting any device to your selected cloud system (SSID, password, token and product key), in the most safe and easy way.
Note, that you need to order a FREE product key from https:/manage.devicedrive.com to redirect the data to your selected cloud. The same product key should be applied to all devices of the same type communicating with the same target cloud. You can set the product key from the mobile app or through the serial interface.
DEVICEDRIVE Cloud
The DeviceDrive Cloud platform gives you the right tools and services to handle connections, gather and make sense of data, and provide the reliable customer experiences required for modern hardware devices. Your device sends JSON formatted data and gets JSON back from the cloud without having to worry about how it all happened. Their LinkUp SDKs lets your mobile App link the device seamlessly to the network, to the user and to the cloud.
Use their management portal to monitor and debug communication flow and direct the data to a destination of your choice for each of your products.
The DeviceDrive ecosystem consists of building blocks adjustable to the business model of each customer. It offers cloud services like OTA upgrades, Cloud Storage, Device Management, Data Analytics, VSaaS, Security and many others.
SPECIFICATIONS
| Type | Cloud Routers,WiFi |
| Applications | The WRF01 has been designed for mobile, wearable electronics and Internet of Things (IoT) applications. |
| On-board modules | The WRF01-M24A module with 802.11 b/g/n protocol which handles all connectivity tasks and feature PCB antenna |
| Key Features | Enable easy and fast connectivity to the cloud, low power mode, simple serial interface for communication. |
| Interface | UART |
| Compatibility | mikroBUS |
| Click board size | M (42.9 x 25.4 mm) |
| Input Voltage | 3.3V |
PINOUT DIAGRAM
This table shows how the pinout of the DeviceDrive Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | NC | ||
| Reset | RST | 2 | RST | INT | 15 | NC | |
| Enable | EN | 3 | CS | RX | 14 | TX | UART Transmit |
| NC | 4 | SCK | TX | 13 | RX | UART Receive | |
| NC | 5 | MISO | SCL | 12 | NC | ||
| NC | 6 | MOSI | SDA | 11 | NC | ||
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | NC | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3663
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606018716463
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.