


Mikroelektronika d.o.o.
GPS Click Board™
GPS Click Board™
SKU: MIKROE-1032
Couldn't load pickup availability


Overview
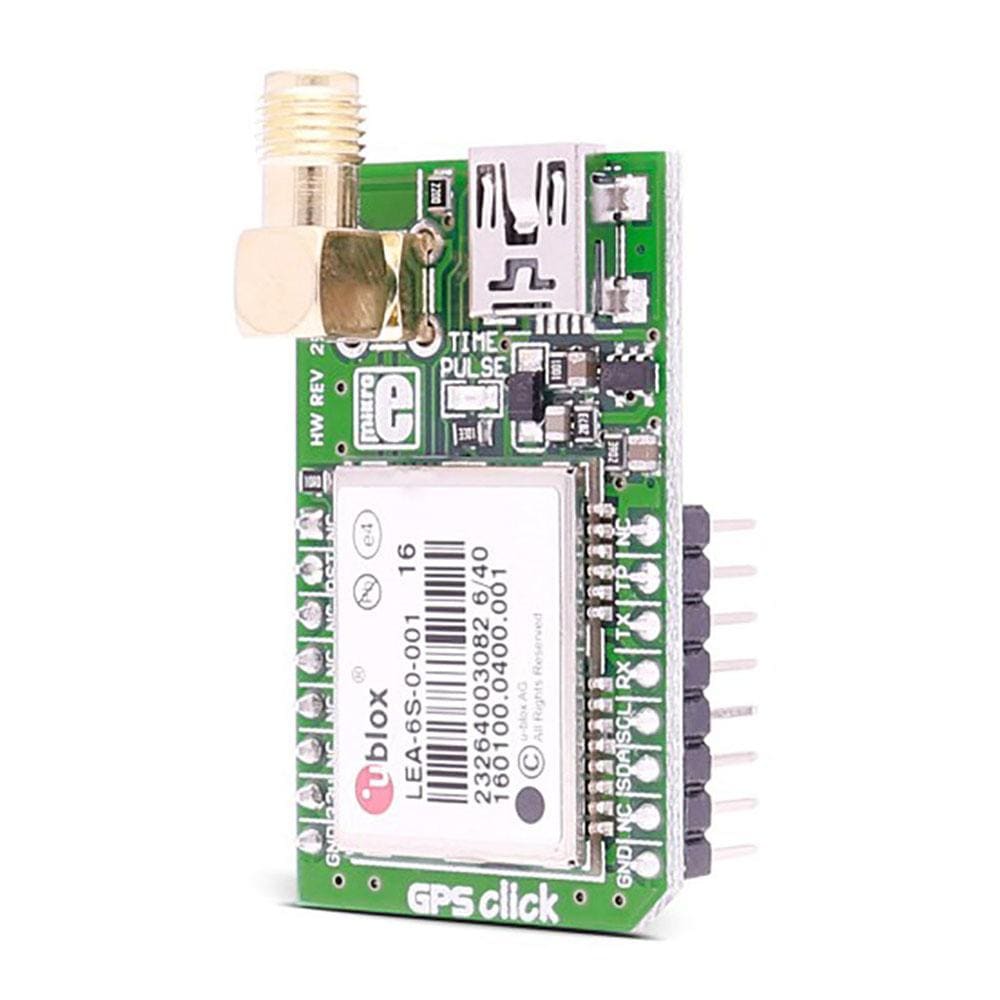
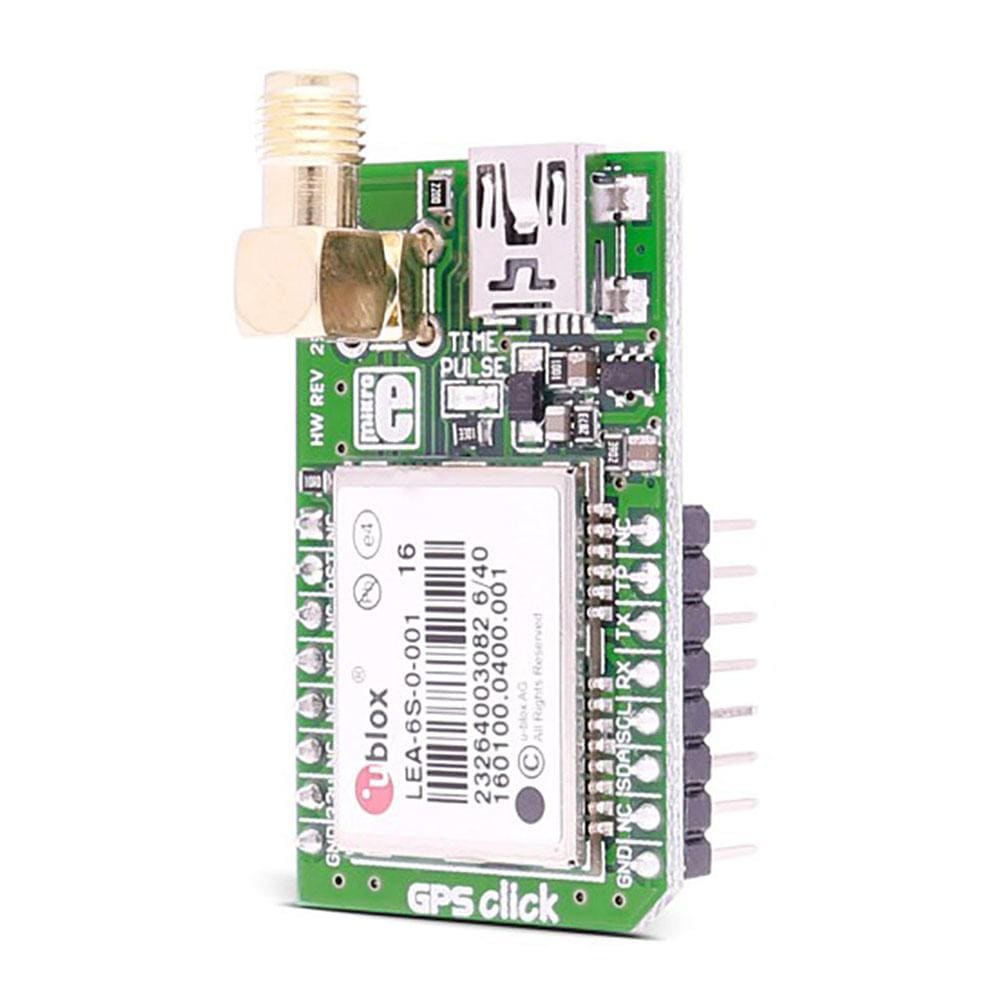
The GPS Click Board™ is a compact solution for adding GPS functionality to your device. It carries the u-blox LEA-6S high-performance position engine.
The GPS Click Board™ is designed to run on a 3.3V power supply and communicates with the target MCU through UART or I2C interface.
Data can also be acquired through a PC application using the USB connection.
Downloads
The GPS Click Board™ is a compact solution for adding GPS functionality to your device. It carries the u-blox LEA-6S high-performance position engine. The click is designed to run on a 3.3V power supply and communicates with the target MCU through UART or I2C interface.
Data can also be acquired through a PC application using the USB connection.
SATELLITE TRACKING
The GPS Click Board™ can simultaneously track up to 16 satellites while searching for new ones. The LEA-6S module's TTFF (time to first fix) is less than one second — this is the measure of time necessary for a GPS receiver to get satellite signals and navigation data, and based on this information, calculate a position (a fix).
POWER CONSUMPTION
The GPS Click Board™ uses 121mW in continuous mode, and only 36mW in power save mode. Once a position is acquired, satellites are passed on to a power-optimized dedicated tracking engine.
Different power modes (Maximum performance, Eco, Power Save) allow you to control the acquisition and tracking engines in order to balance between performance and power consumption. Detailed information about the different power modes and their configuration are available in the data sheet, but here are a few excerpts to give an overview:
MAXIMUM PERFORMANCE MODE
"During a Cold start, a receiver in Maximum Performance Mode continuously deploys the acquisition engine to search for all satellites. Once the receiver has a position fix (or if pre-positioning information is available), the acquisition engine continues to be used to search for all visible satellites that are not being tracked."
ECO MODE
During a Cold start, a receiver in Eco Mode works exactly as in Maximum Performance Mode. Once a position can be calculated and a sufficient number of satellites are being tracked, the acquisition engine is powered off resulting in significant power savings. The tracking engine continuously tracks acquired satellites and acquires other available or emerging satellites. Note that even if the acquisition engine is powered off, satellites continue to be acquired
POWER SAVE MODE
Power Save Mode (PSM) allows a reduction in system power consumption by selectively switching parts of the receiver on and off. Power Save mode is not available with LEA-6R.
SPECIFICATIONS
| Type | GPS+GNSS |
| Applications | The GPS Click Board™ is ideal for asset tracking, road navigation devices, public transportation vehicle information systems and more. |
| On-board modules | LEA-6S high performance u-blox 6 positioning engine |
| Key Features | SuperSense® Indoor GPS: -160 dBm tracking sensitivity |
| Interface | GPIO,I2C,UART,USB |
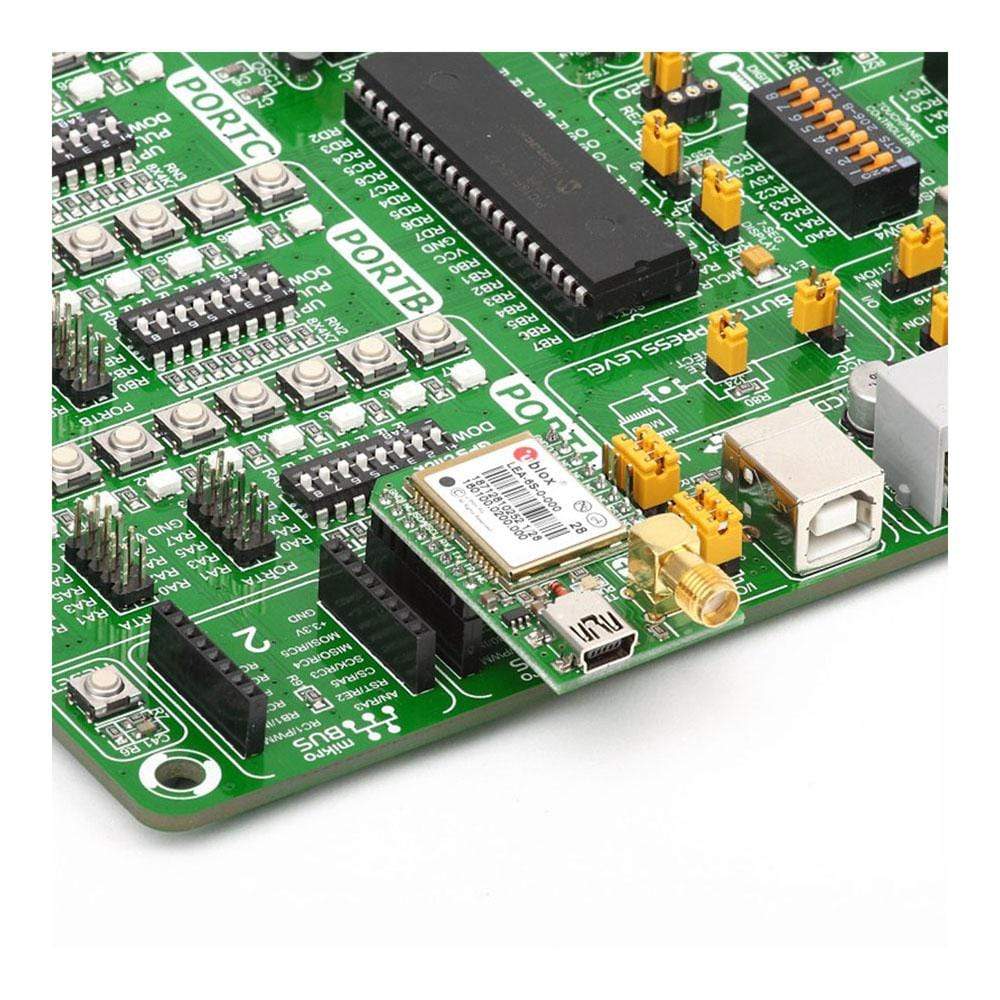
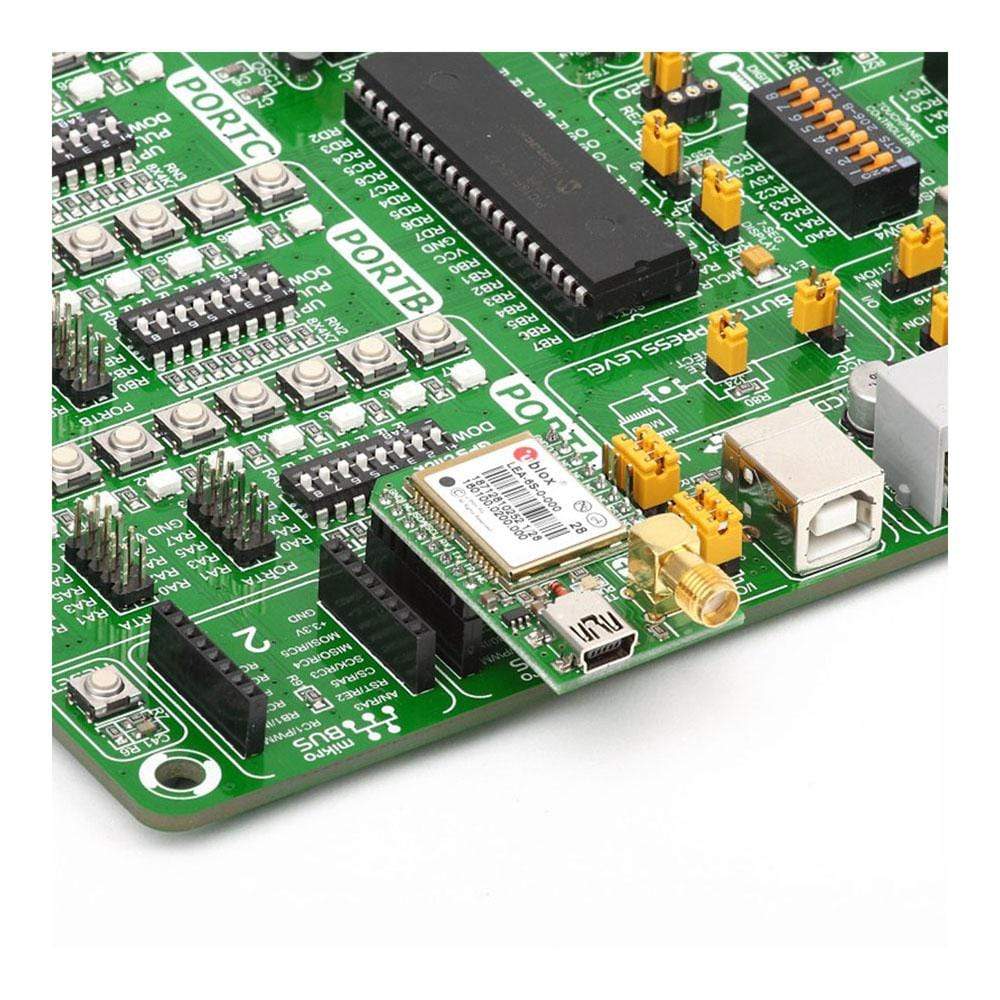
| Compatibility | mikroBUS |
| Click board size | M (42.9 x 25.4 mm) |
| Input Voltage | 3.3V |
PINOUT DIAGRAM
This table shows how the pinout of the GPS Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | NC | ||
| External Reset | RESET_N | 2 | RST | INT | 15 | TIMEPULSE | Timepulse |
| NC | 3 | CS | RX | 14 | TxD1 | Serial Port 1 | |
| NC | 4 | SCK | TX | 13 | RxD1 | Serial Port 1 | |
| NC | 5 | MISO | SCL | 12 | SCL2 | DDC Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA2 | DDC Data | |
| Power supply | +3.3V | 7 | 3.3V | 5V | 10 | NC | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-1032
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.034 kg
|
| Other | |
EAN |
8606015073637
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.