
Mikroelektronika d.o.o.
Carte Click MPU 9DOF
Carte Click MPU 9DOF
SKU: MIKROE-1719
Prix habituel
€38,95 EUR
hors taxes
Prix habituel
Prix promotionnel
Prix unitaire
par
€38,95 EUR
hors taxes
Frais d'expédition calculés à l'étape de paiement.
If no stock shown above, check availability
Impossible de charger la disponibilité du service de retrait

Overview
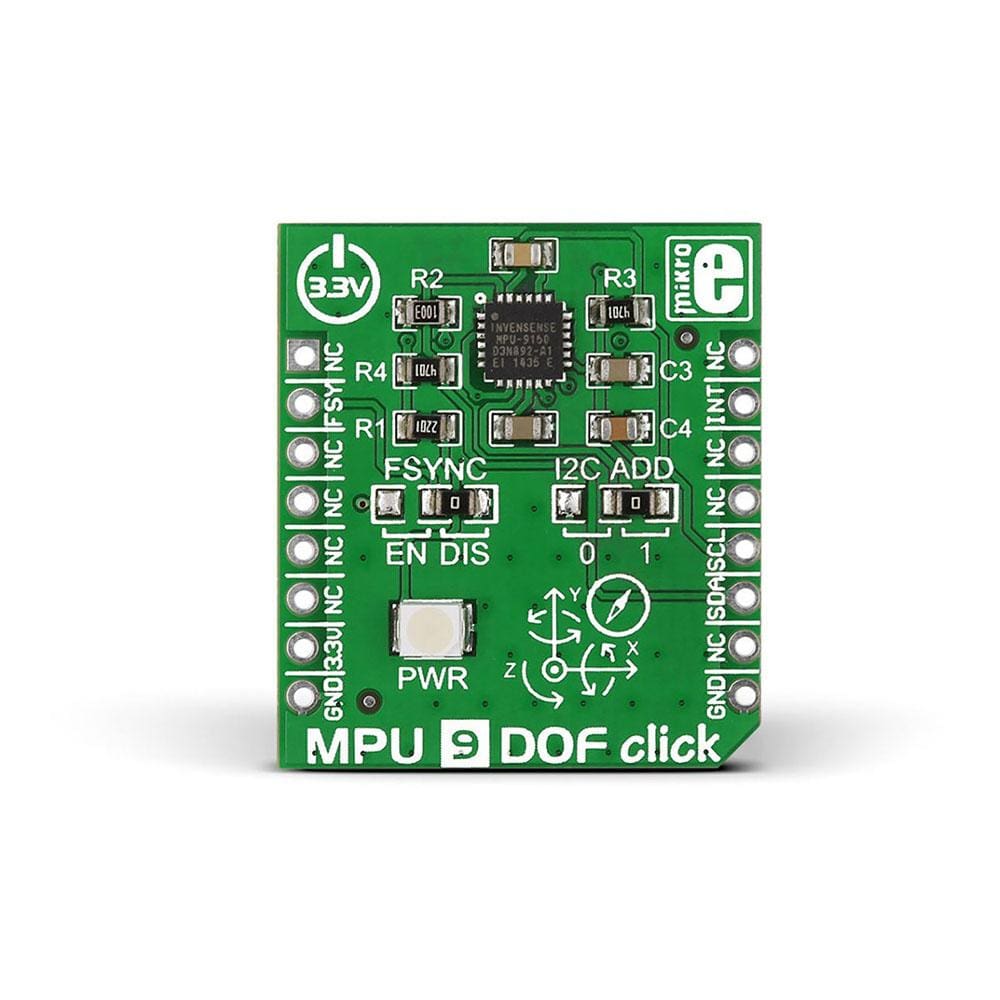
The MPU 9DOF Click Board™ from MikroE is a measurement add-on board that includes the MPU-9150 motion tracking MikroBUS module.
The Click Board™ includes two devices: a MPU-6050 3-Axios Accelerometer and 3-Axis Gyroscope and an AK8975 3-Axis Compass.
Downloads
La carte Click Board™ MPU 9DOF de MikroE est une carte complémentaire de mesure qui comprend le module MikroBUS de suivi de mouvement MPU-9150.
Le Click Board™ comprend deux appareils : un accéléromètre 3 axes et un gyroscope 3 axes MPU-6050 et une boussole 3 axes AK8975.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-1719
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.03 kg
|
| Other | |
EAN |
8606018714193
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.