

Mikroelektronika d.o.o.
Carte Brushless 23 Click
Carte Brushless 23 Click
SKU: MIKROE-5100
Impossible de charger la disponibilité du service de retrait



Key Features
Overview
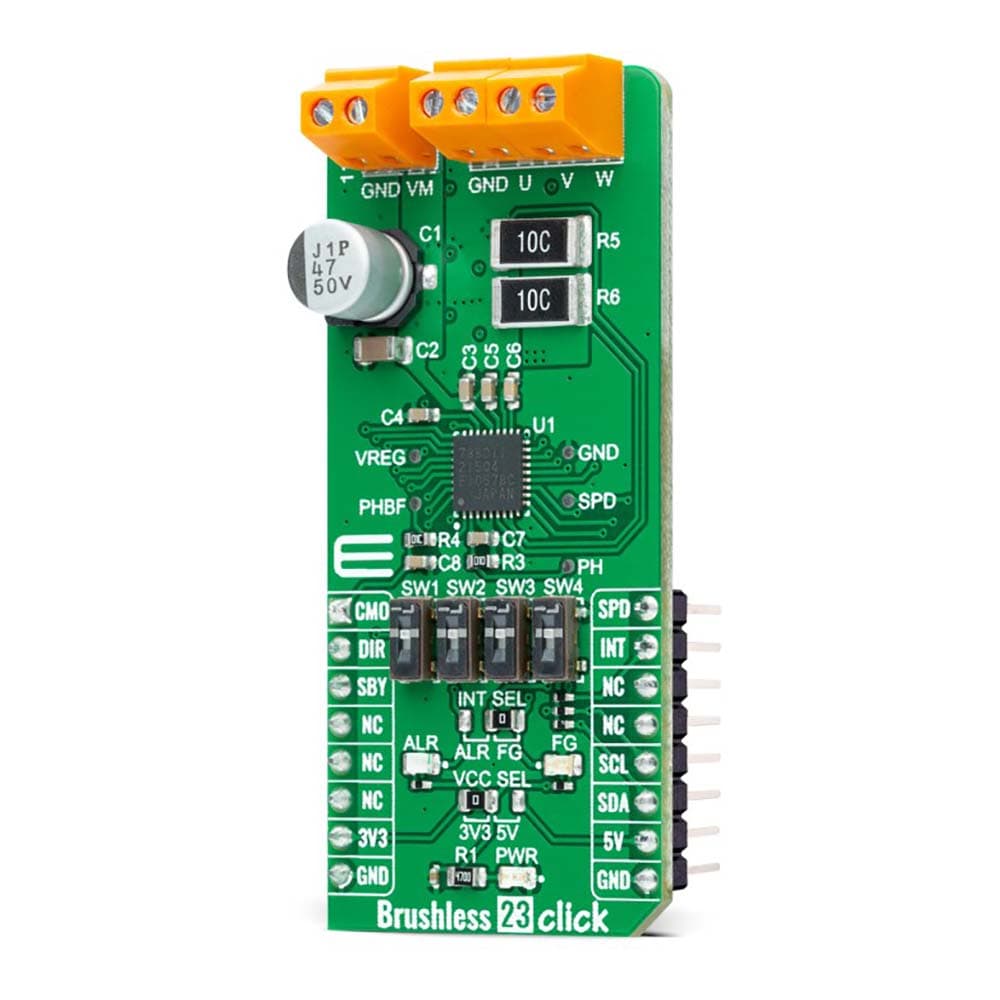
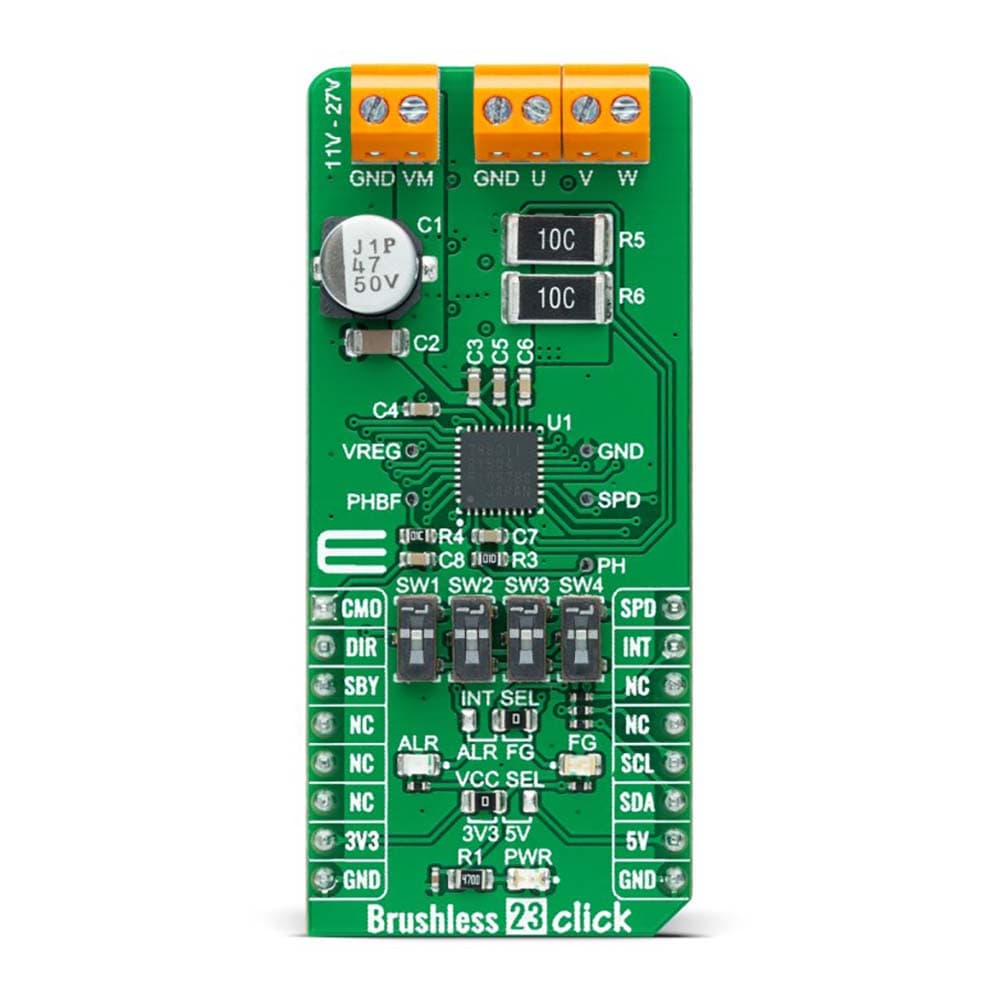
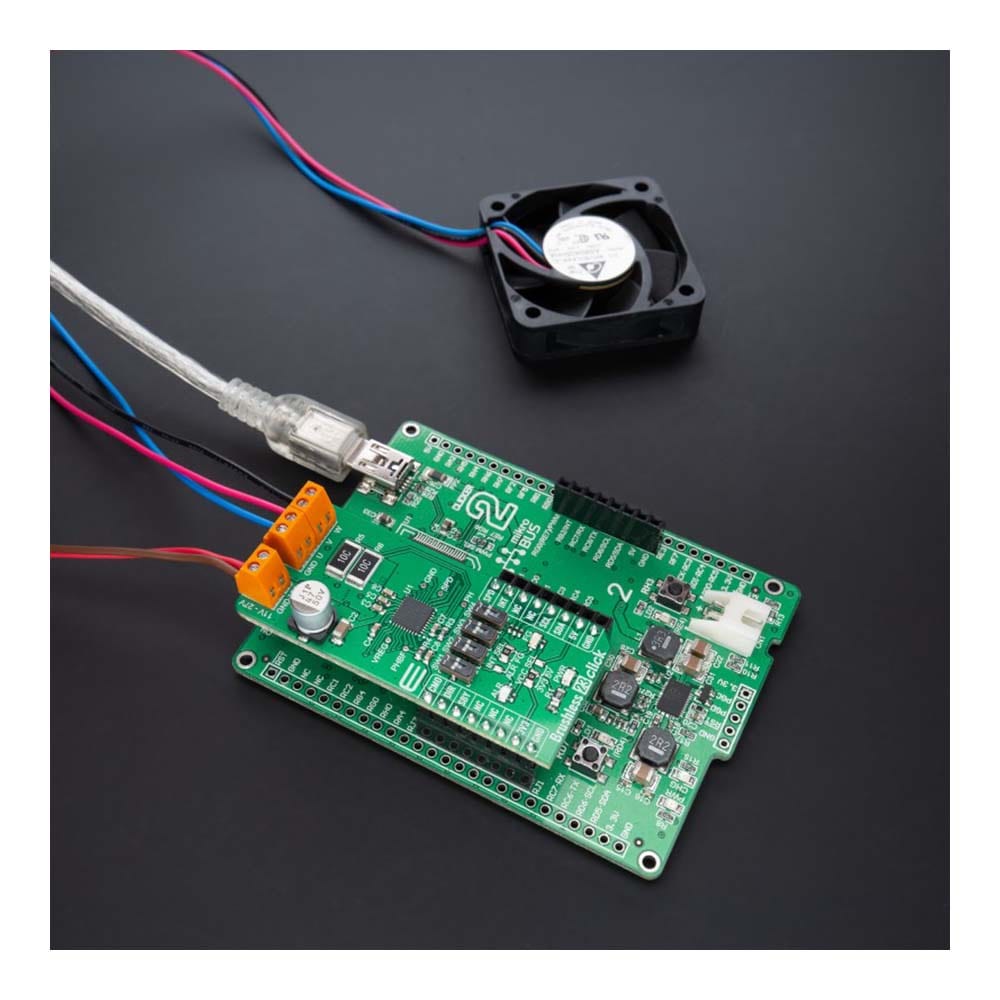
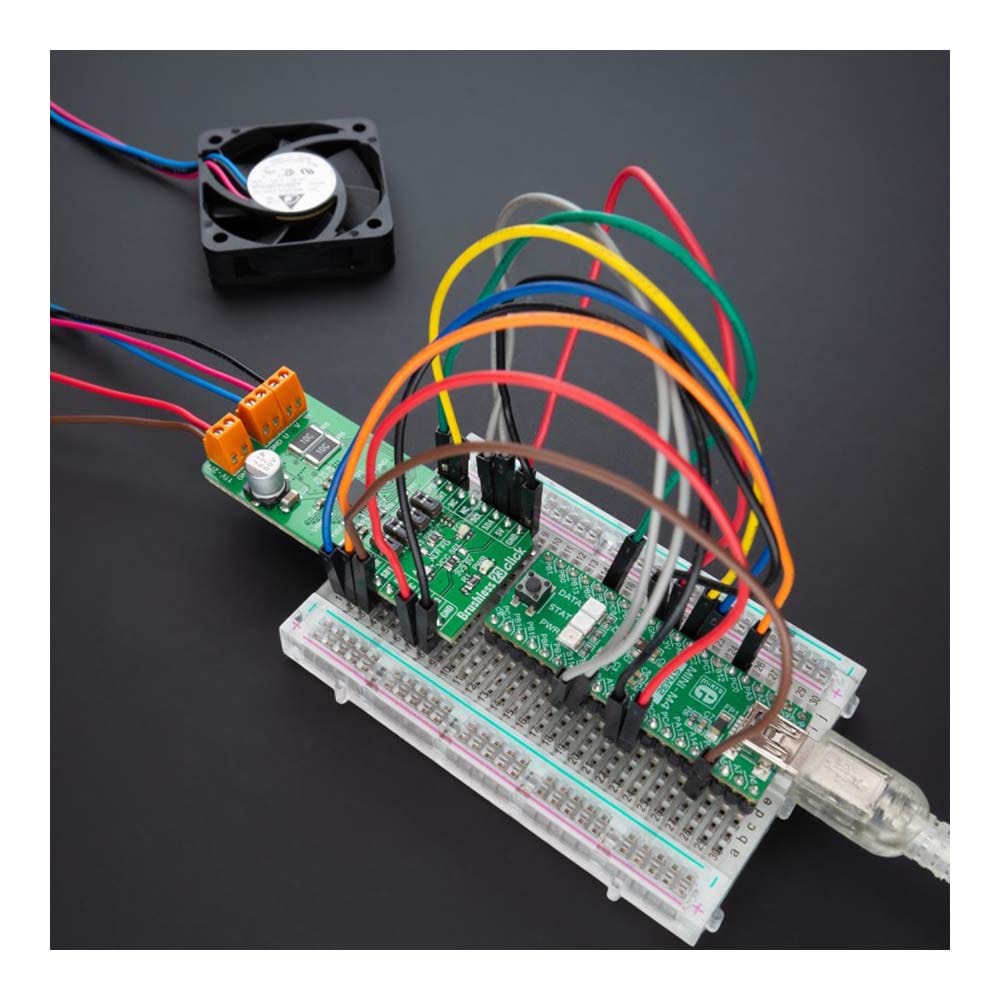
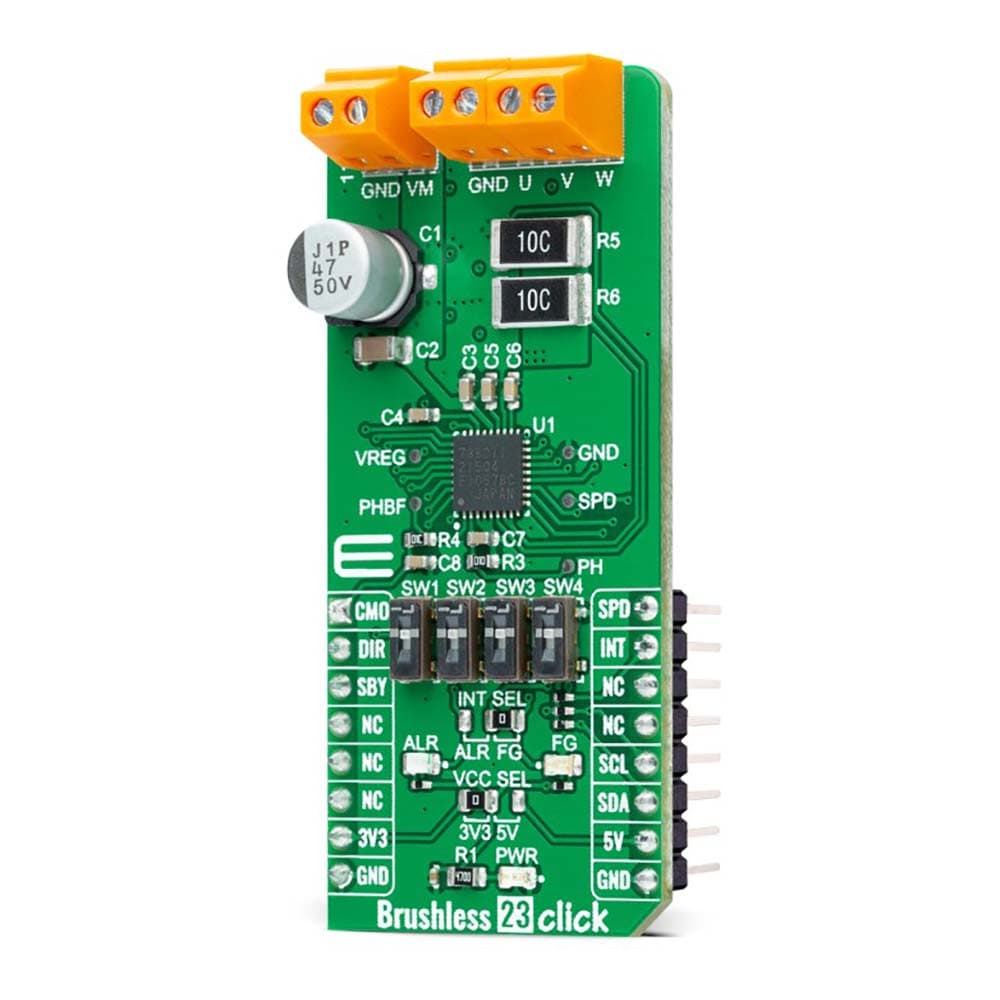
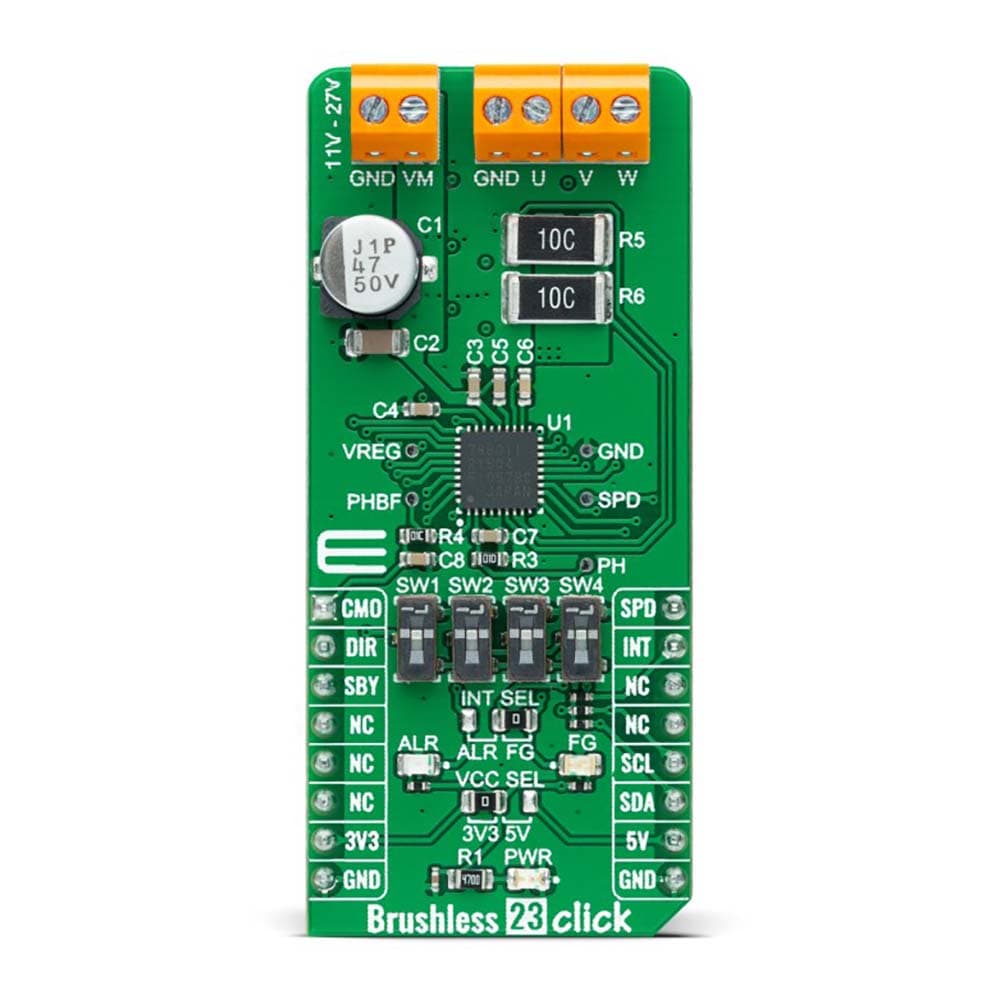
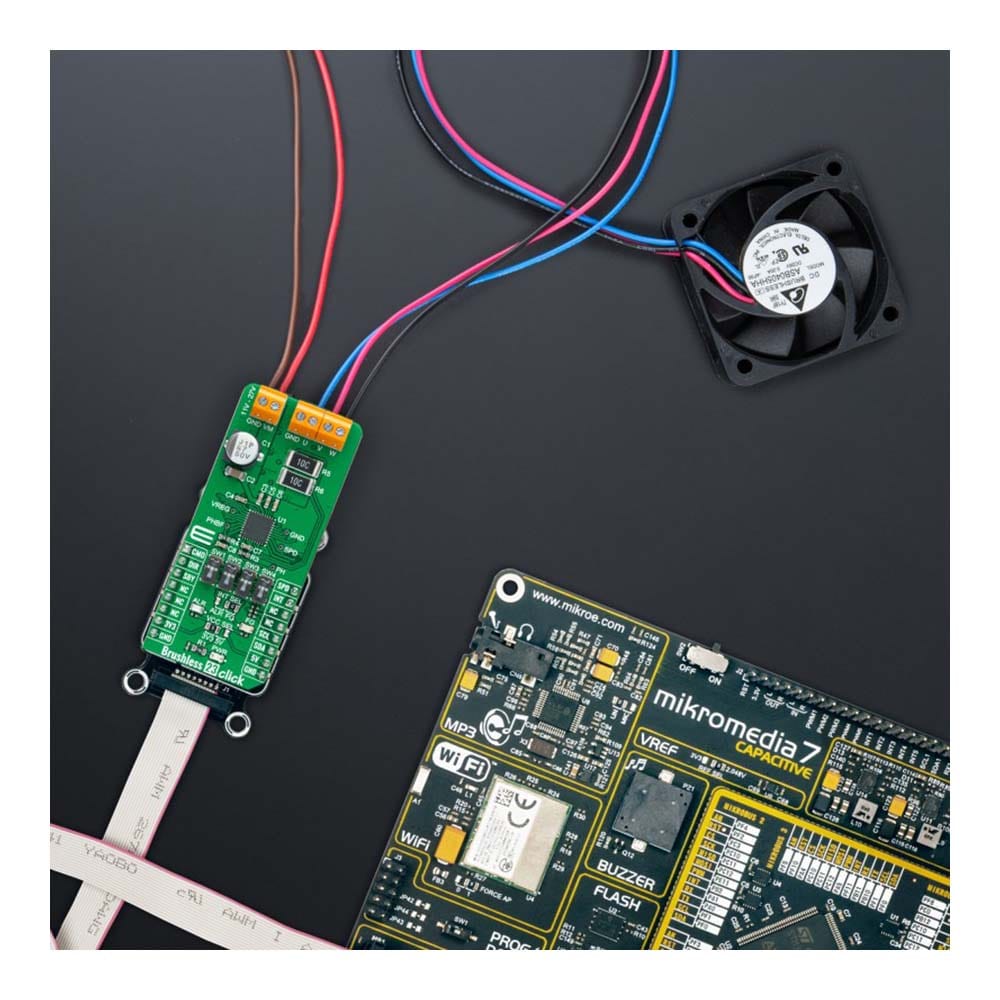
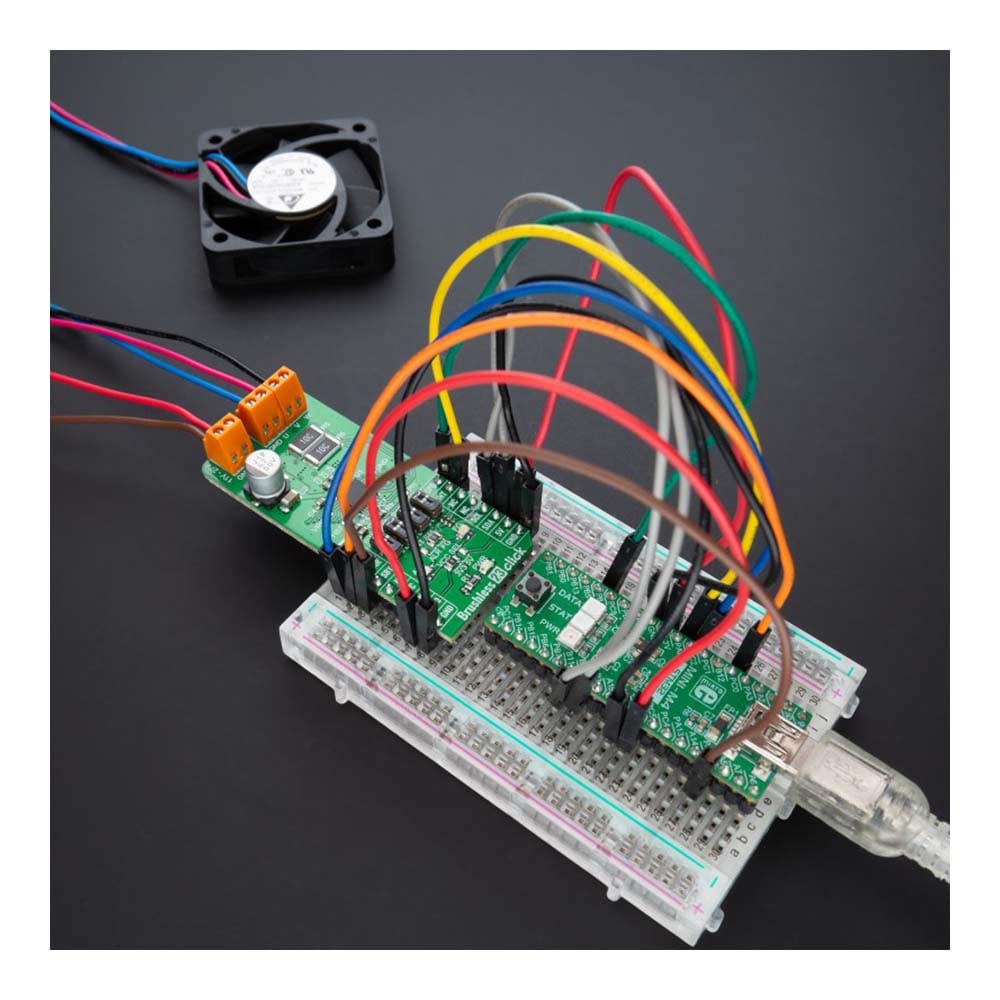
The Brushless 23 Click Board™ is a compact add-on board suitable for controlling BLDC motors with any microcontroller. This board features the TC78B011FTG, a three-phase sine-wave PWM pre-driver realized with six external MOSFETs to drive sensorless brushless motors from Toshiba Semiconductor. Some of the main features are a built-in closed-loop speed control function with internal non-volatile memory (NVM) for speed profile setting and the ability to set other features such as rotation direction selection, brake, Standby mode, and others. It also has a wide operating voltage range of 11V to 27V with an output current capacity of 5A and several built-in error detection circuits. This Click board™ provides optimum operational efficiency in applications such as high-velocity server fans, blowers, and pumps.
The Brushless 23 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
La carte Click Board™ Brushless 23 est une carte complémentaire compacte adaptée au contrôle des moteurs BLDC avec n'importe quel microcontrôleur. Cette carte est équipée du TC78B011FTG, un pré-pilote PWM à onde sinusoïdale triphasée réalisé avec six MOSFET externes pour piloter les moteurs sans balais sans capteur de Toshiba Semiconductor. Parmi ses principales caractéristiques figurent une fonction de contrôle de vitesse en boucle fermée intégrée avec mémoire interne non volatile (NVM) pour le réglage du profil de vitesse et la possibilité de définir d'autres fonctionnalités telles que la sélection du sens de rotation, le freinage, le mode veille et autres. Elle dispose également d'une large plage de tension de fonctionnement de 11 V à 27 V avec une capacité de courant de sortie de 5 A et plusieurs circuits de détection d'erreur intégrés. Cette carte Click™ offre une efficacité opérationnelle optimale dans des applications telles que les ventilateurs de serveur à grande vitesse, les souffleurs et les pompes.
La carte Click Board™ Brushless 23 est supportée par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette carte Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-5100
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027388972
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.