




Mikroelektronika d.o.o.
Carte à clic pour bus CAN
Carte à clic pour bus CAN
SKU: MIKROE-4640
Impossible de charger la disponibilité du service de retrait




Key Features
Overview
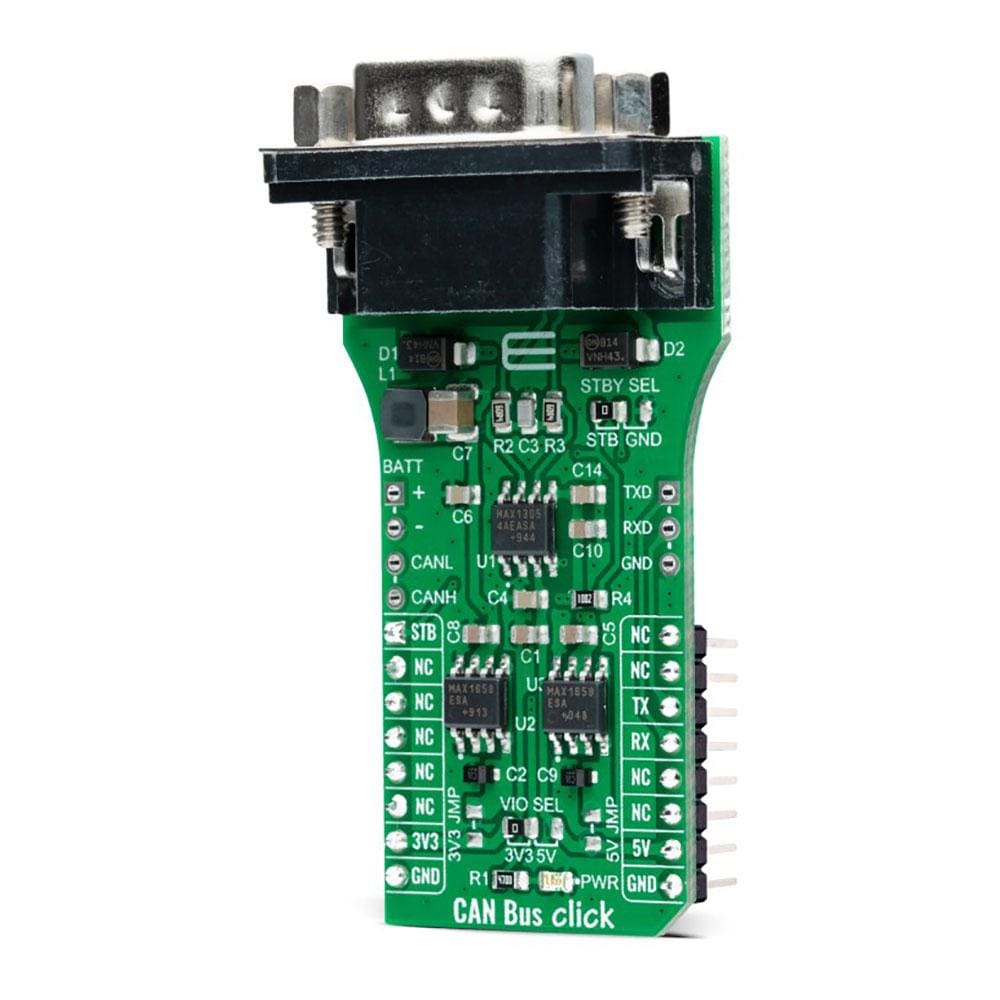
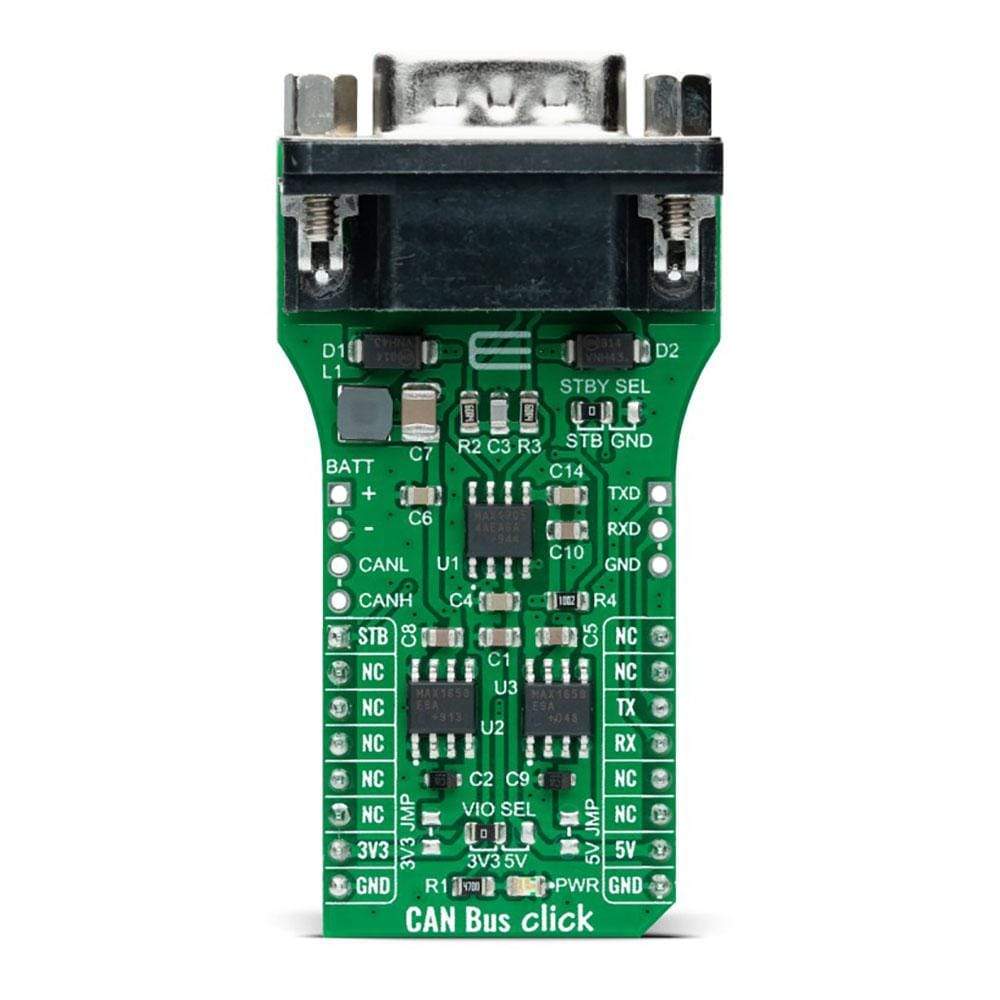
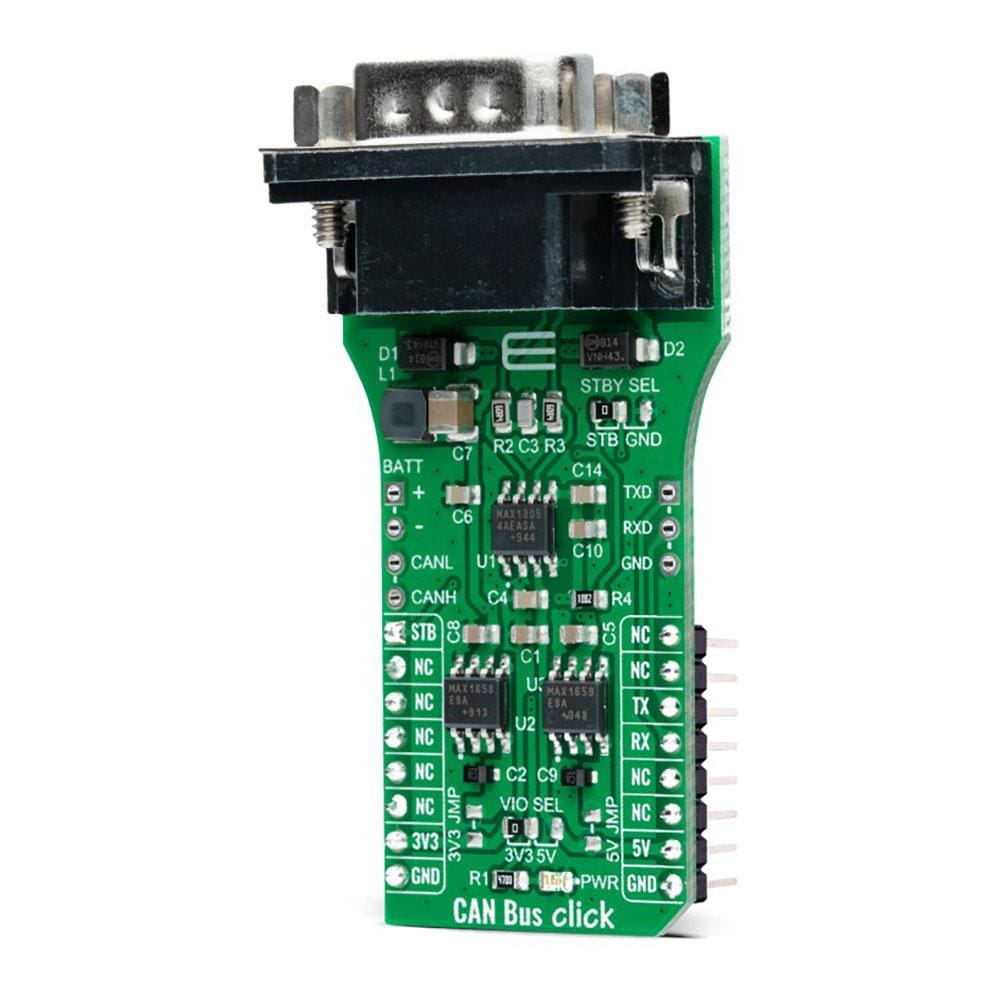
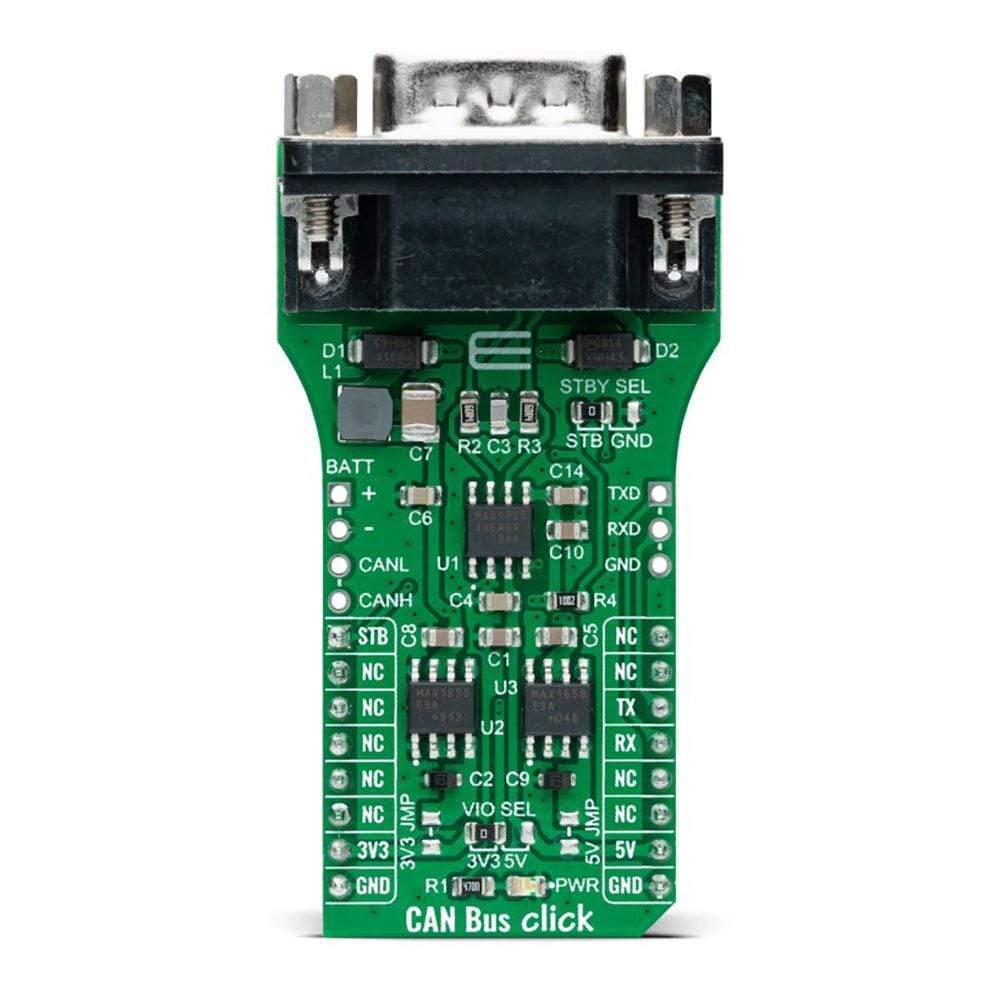
The CAN Bus Click Board™ is a compact add-on board that provides a link between the CAN protocol controller and the physical wires of the bus lines in a control area network (CAN). This board features the MAX13054, an industry-standard, high-speed CAN transceiver with extended ±80V fault protection from Maxim Integrated. The CAN transceiver has an input common-mode range greater than ±12V with data rates up to 1Mbps, exceeding the ISO11898 specification of -2V to +7V, and feature ±8kV ESD protection. It also comes with a Standby feature that shuts off the transmitter and switches the receiver to a low-current/low-speed state.
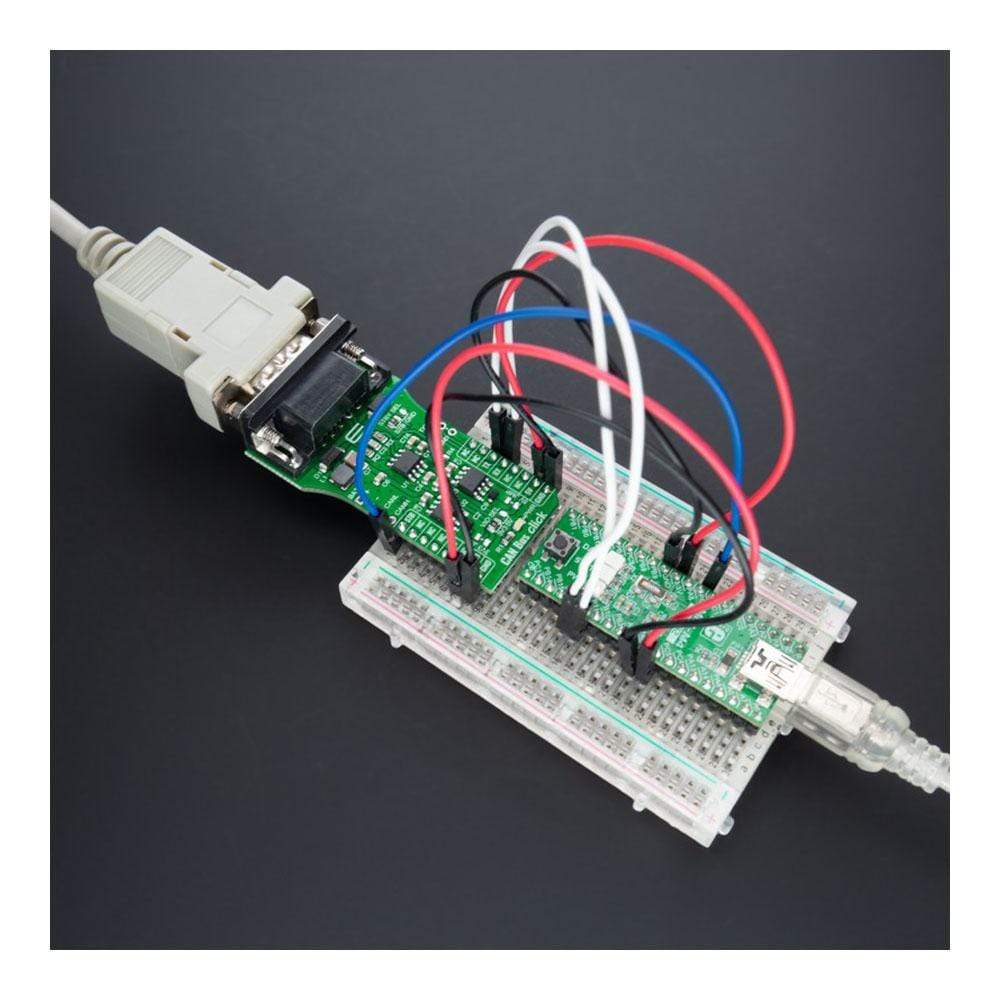
The CAN Bus Click Board™ is suitable for harsh industrial environments and industrial network applications where overvoltage protection is required.
Downloads
La carte CAN Bus Click Board™ est une carte complémentaire compacte qui fournit un lien entre le contrôleur de protocole CAN et les câbles physiques des lignes de bus dans un réseau de zone de contrôle (CAN). Cette carte est équipée du MAX13054, un émetteur-récepteur CAN haute vitesse standard de l'industrie avec protection étendue contre les pannes de ±80 V de Maxim Integrated. L'émetteur-récepteur CAN a une plage de mode commun d'entrée supérieure à ±12 V avec des débits de données jusqu'à 1 Mbps, dépassant la spécification ISO11898 de -2 V à +7 V, et dispose d'une protection ESD de ±8 kV. Il est également doté d'une fonction de veille qui éteint l'émetteur et fait passer le récepteur à un état de faible courant/faible vitesse.
Le CAN Bus Click Board™ convient aux environnements industriels difficiles et aux applications de réseau industriel où une protection contre les surtensions est requise.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4640
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027382796
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.