







Mikroelektronika d.o.o.
Carte à clic pour moteur à courant continu 17
Carte à clic pour moteur à courant continu 17
SKU: MIKROE-4454
Impossible de charger la disponibilité du service de retrait


Overview
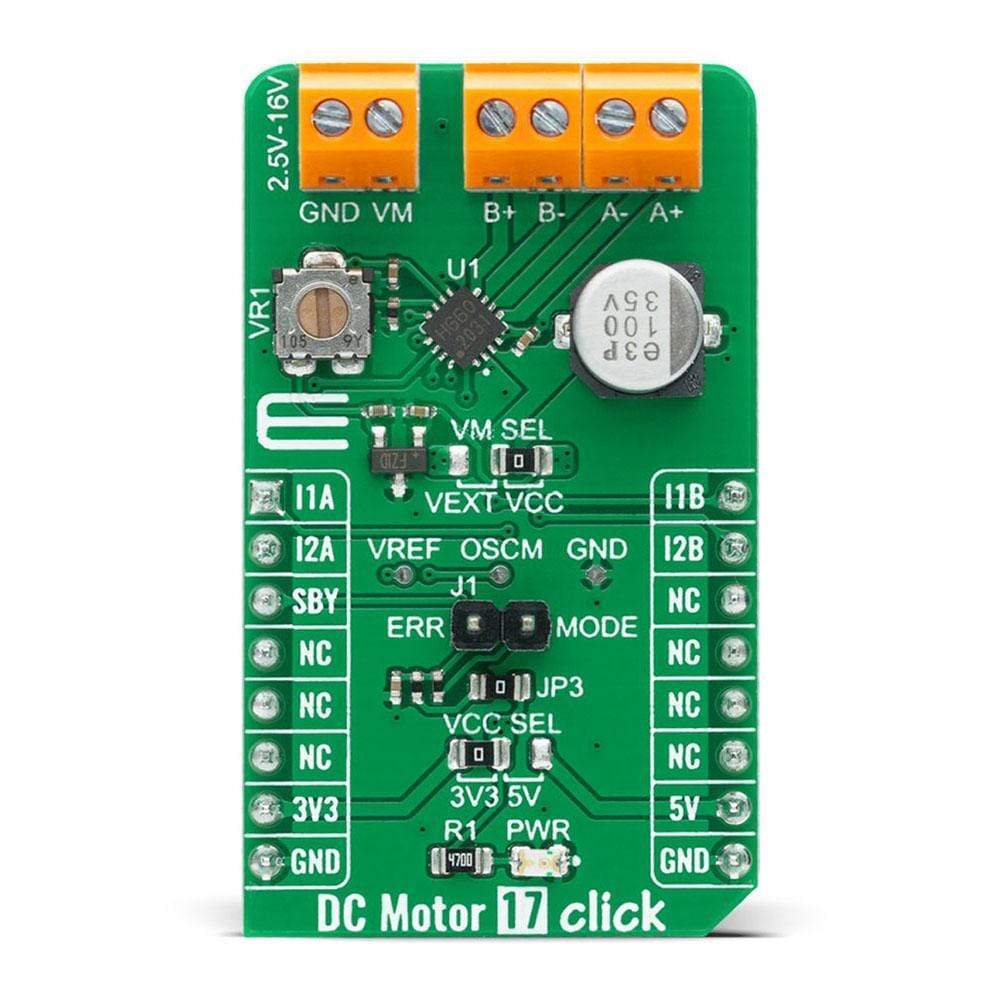
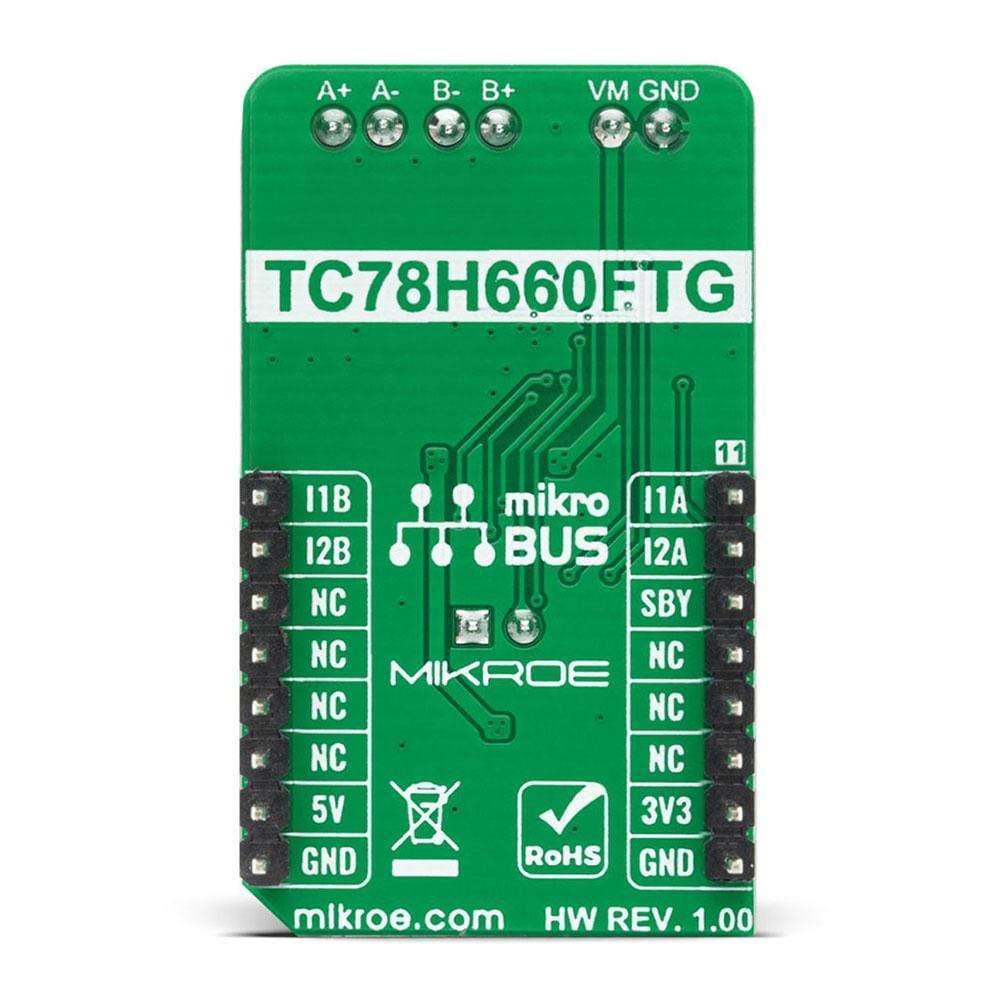
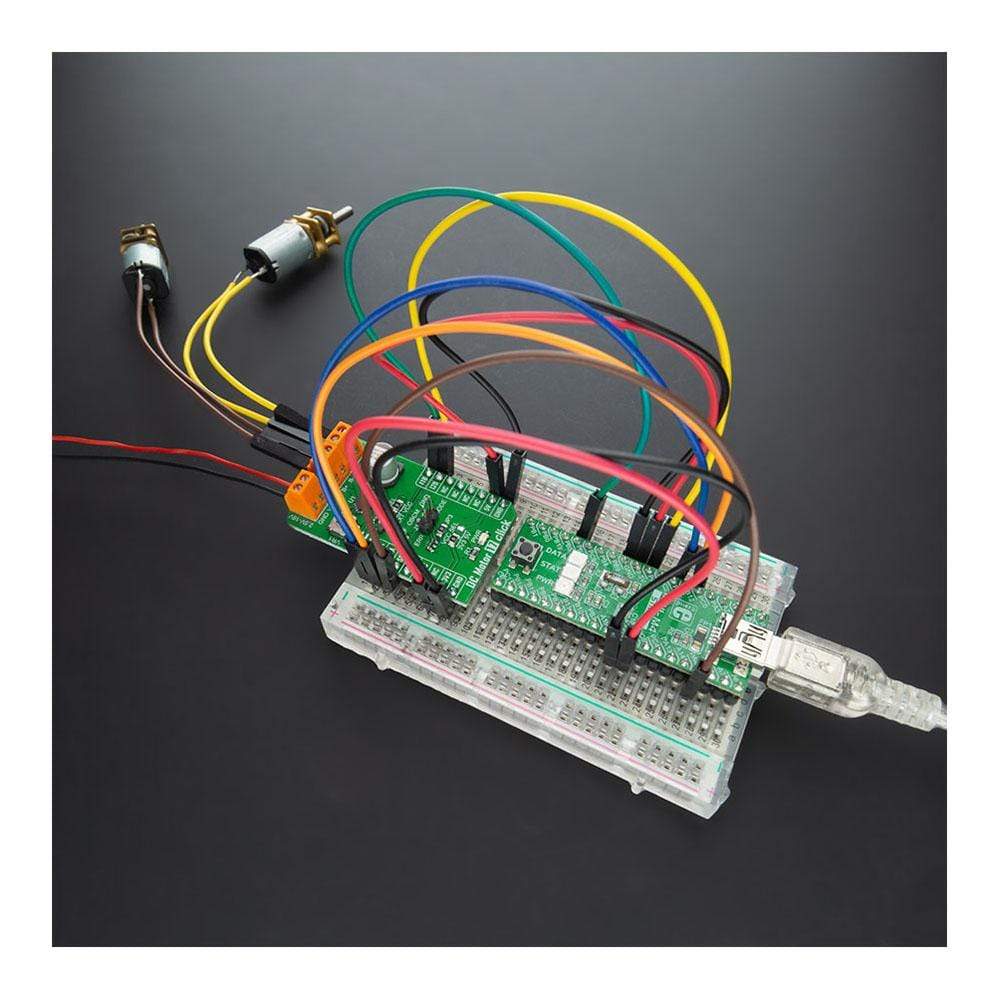
The DC Motor 17 Click™ Board is a compact add-on board that contains a brushed DC motor driver. This board features the TC78H660FTG, a dual H Bridge driver for one or two brushed motors that incorporate a DMOS output transistor with low on-resistance from Toshiba Semiconductor. This IC is a PWM controlled constant-current drive with supply voltages from 2.5V to 16V and 2A of output current. It features a sense-resistor less current control architecture and VCC regulator for the internal circuit. Also offers multi-error detect functions with error detection flag output function. This Click Board™ is suitable for driving DC motors, controlling the direction of the rotation, as well as brake and regulating the motor current.
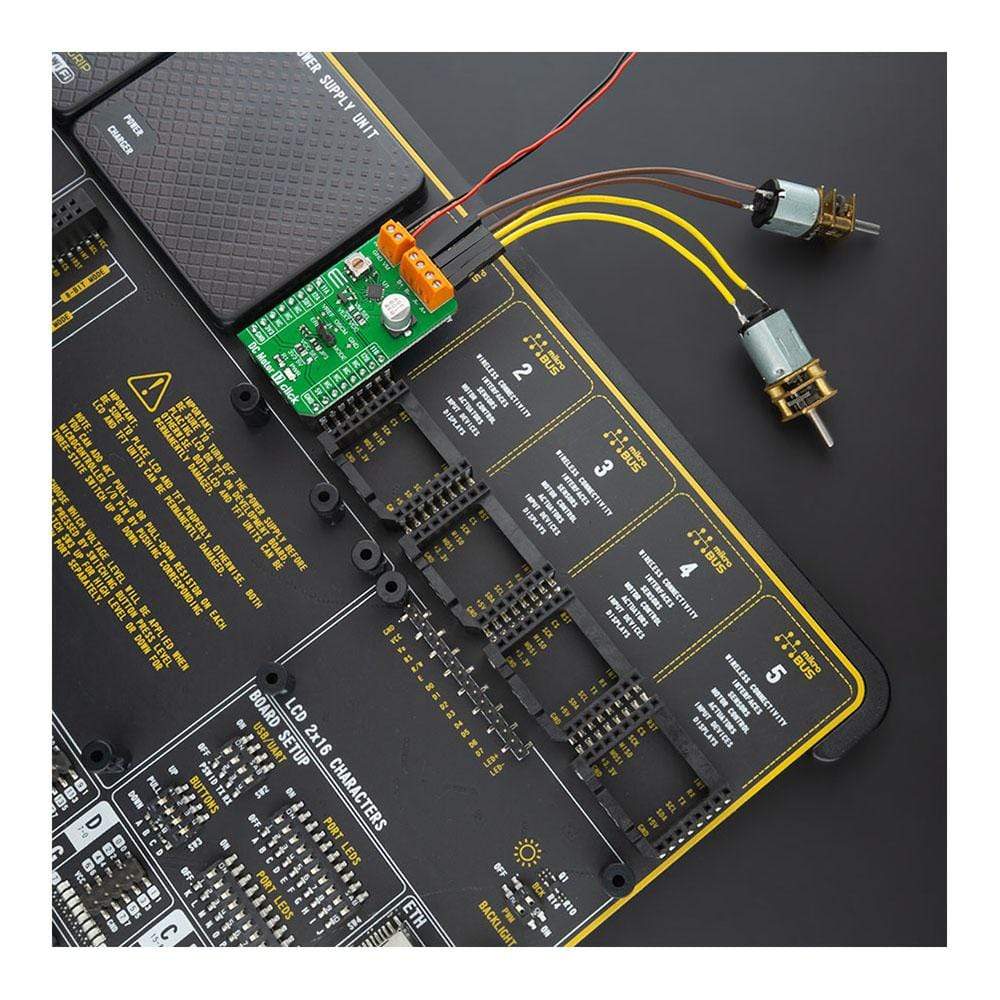
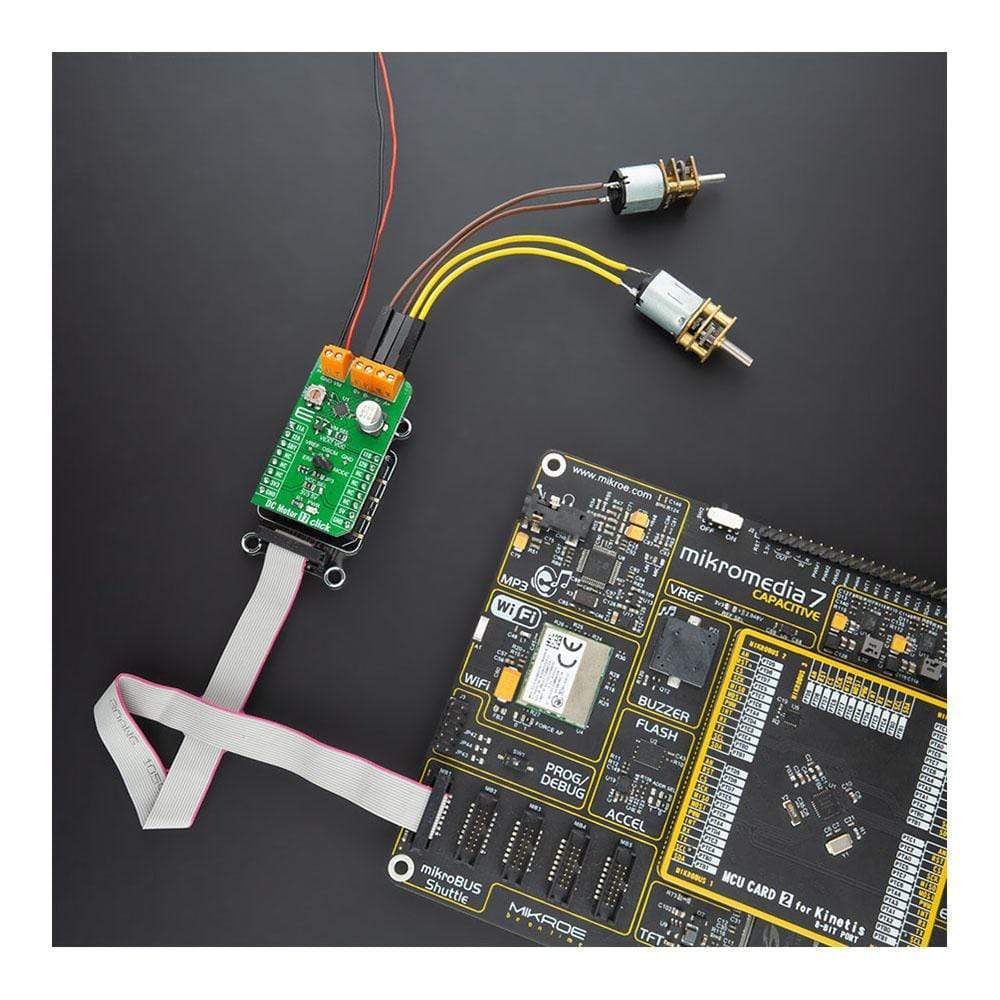
The DC Motor 17 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
La carte DC Motor 17 Click™ est une carte complémentaire compacte qui contient un pilote de moteur CC à balais. Cette carte comprend le TC78H660FTG, un pilote à double pont en H pour un ou deux moteurs à balais qui intègrent un transistor de sortie DMOS à faible résistance à l'état passant de Toshiba Semiconductor. Ce circuit intégré est un variateur à courant constant contrôlé par PWM avec des tensions d'alimentation de 2,5 V à 16 V et 2 A de courant de sortie. Il dispose d'une architecture de contrôle de courant sans résistance de détection et d'un régulateur VCC pour le circuit interne. Offre également des fonctions de détection d'erreurs multiples avec fonction de sortie d'indicateur de détection d'erreur. Cette carte Click™ convient à la commande de moteurs à courant continu, au contrôle du sens de rotation, ainsi qu'au freinage et à la régulation du courant du moteur.
Le DC Motor 17 Click Board™ est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Ce Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé de la prise mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4454
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027381300
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.