




Mikroelektronika d.o.o.
Tableau à clic Haptic 2
Tableau à clic Haptic 2
SKU: MIKROE-4452
Impossible de charger la disponibilité du service de retrait




Overview
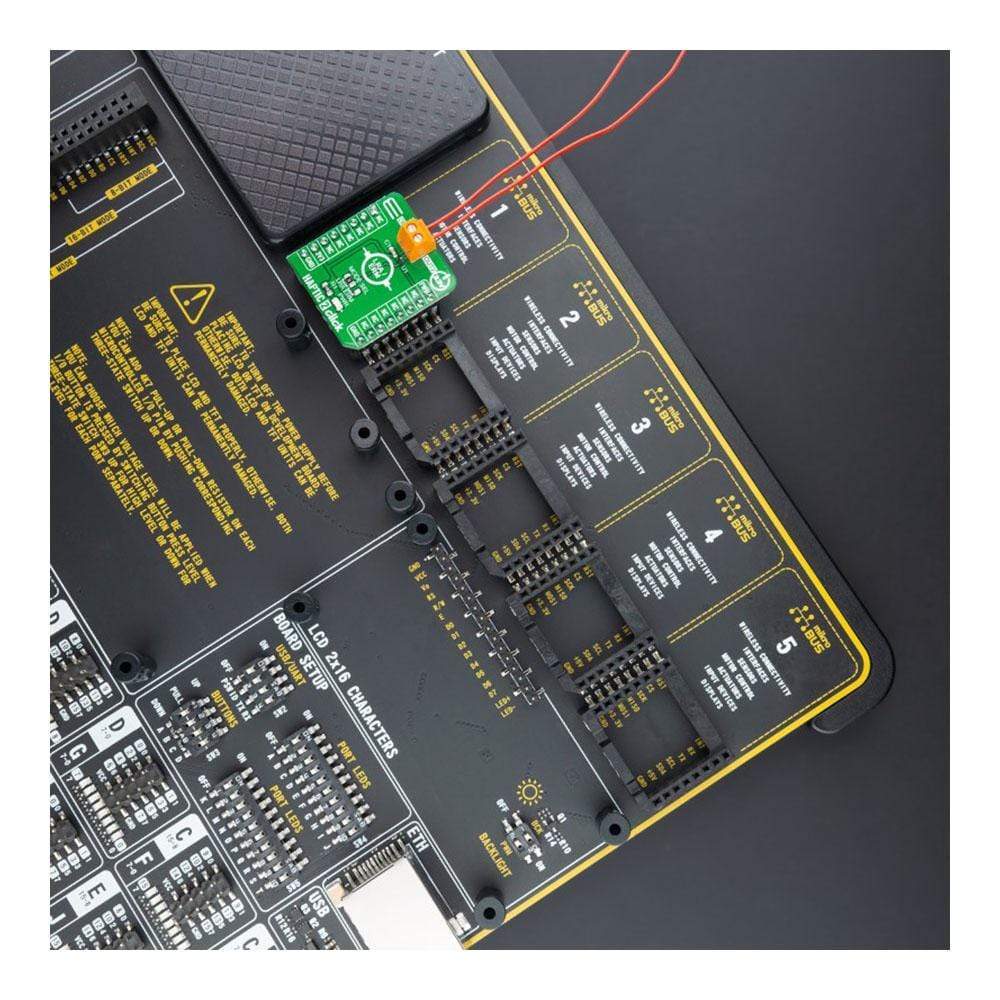
The Haptic 2 Click Board™ is a compact add-on board with a linear vibration driver. This board features the LC898302AXA, a motor driver dedicated to LRA and ERM applications from ON Semiconductor. Controlled by only one pin, it allows crisp vibration thanks to automatic braking and over-driving feature and ignores the deviation of resonance frequency thanks to auto-tuning function. The original driving waveform will enable you to reduce power consumption, and it is helpful to maintain battery lifetime. This Click Board™ is suitable for numerous everyday applications such as indicator systems, game consoles, training equipment/simulators with haptics function, robotics and mechatronics, and many more.
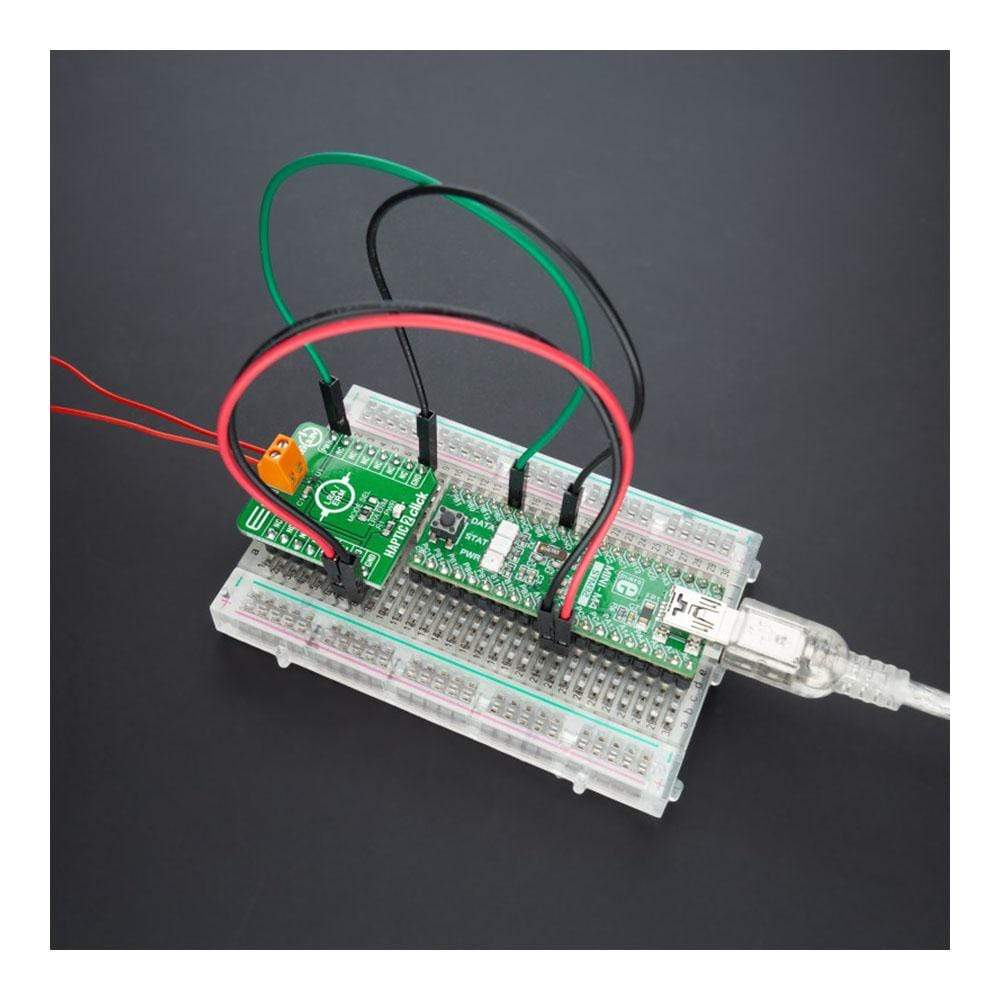
The Haptic 2 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Le Haptic 2 Click Board™ est une carte complémentaire compacte avec un pilote de vibration linéaire. Cette carte est équipée du LC898302AXA, un pilote de moteur dédié aux applications LRA et ERM d'ON Semiconductor. Contrôlé par une seule broche, il permet des vibrations nettes grâce au freinage automatique et à la fonction de surentraînement et ignore l'écart de fréquence de résonance grâce à la fonction d'auto-réglage. La forme d'onde de pilotage d'origine vous permettra de réduire la consommation d'énergie et est utile pour maintenir la durée de vie de la batterie. Ce Click Board™ convient à de nombreuses applications quotidiennes telles que les systèmes d'indicateurs, les consoles de jeu, les équipements/simulateurs de formation avec fonction haptique, la robotique et la mécatronique, et bien d'autres encore.
Le tableau à clic Haptic 2™ est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4452
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.017 kg
|
| Other | |
EAN |
8606027382062
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.