







Mikroelektronika d.o.o.
Carte à clic sans balais 9
Carte à clic sans balais 9
SKU: MIKROE-4387
Impossible de charger la disponibilité du service de retrait
Overview
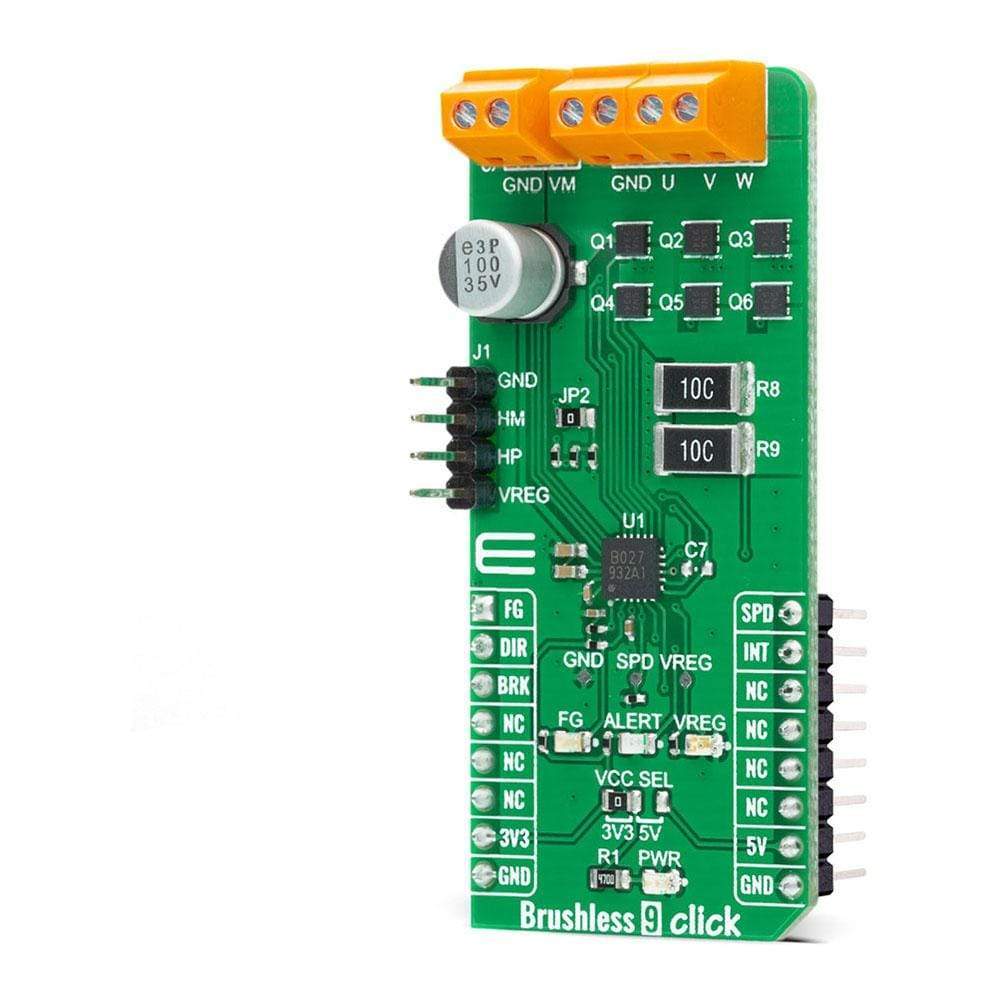
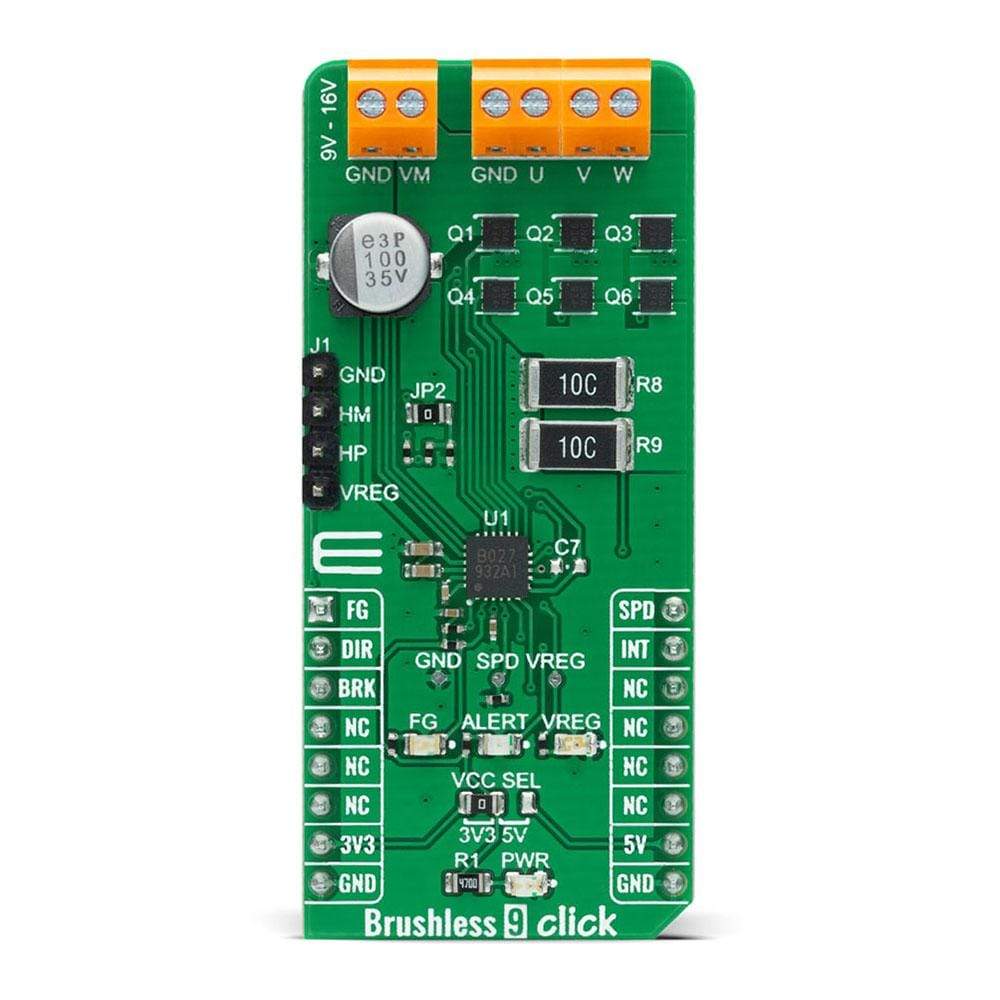
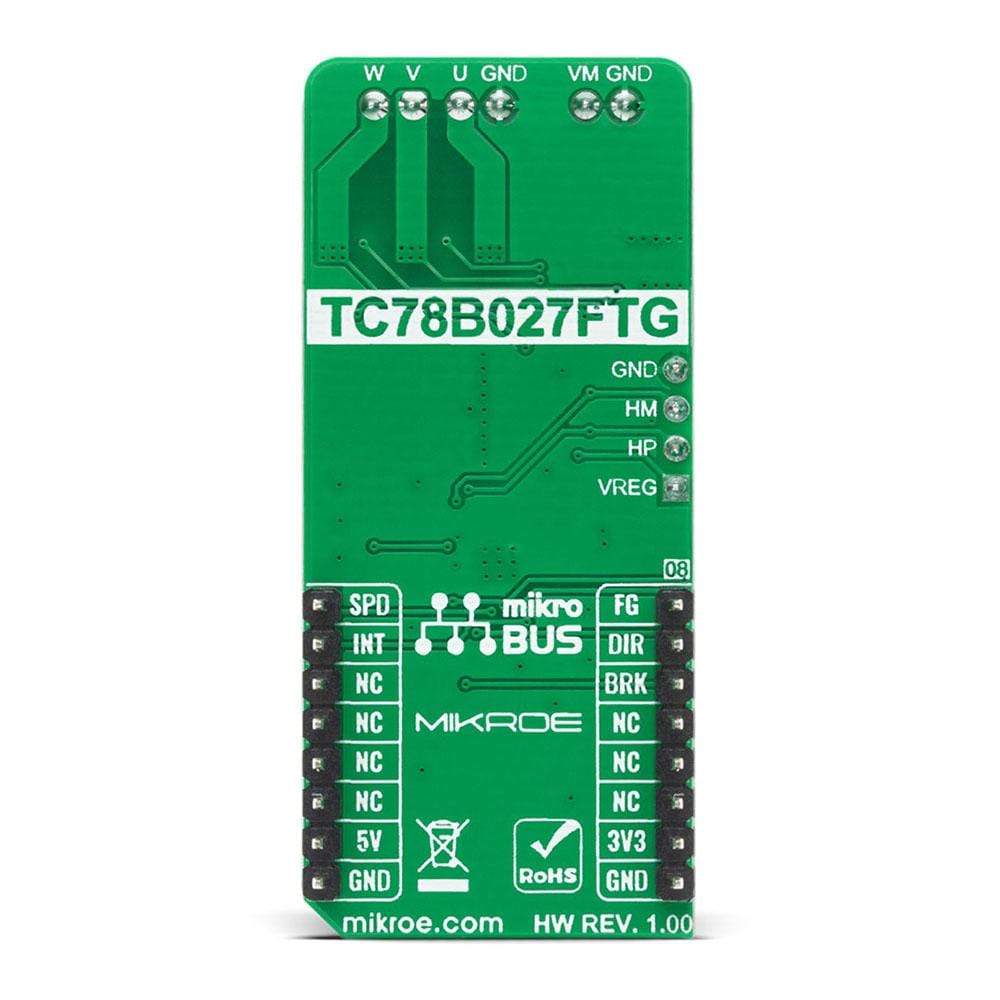
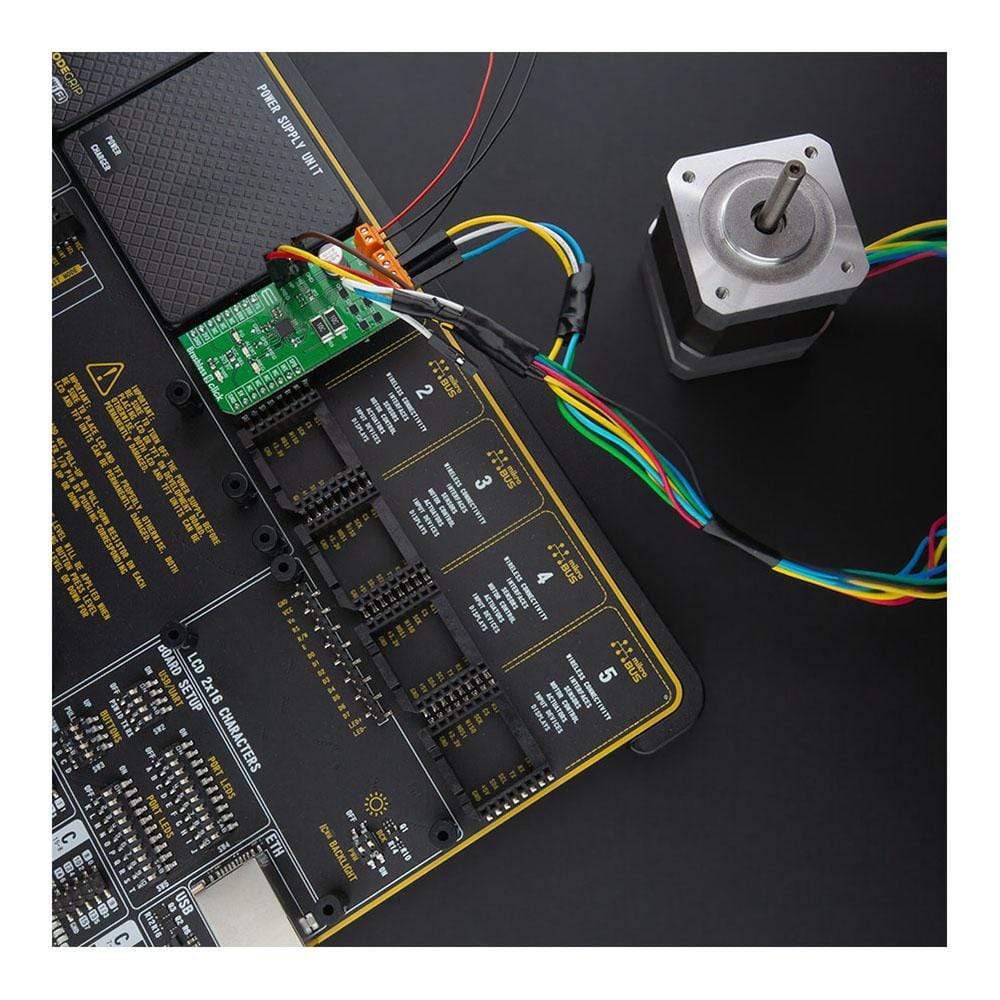
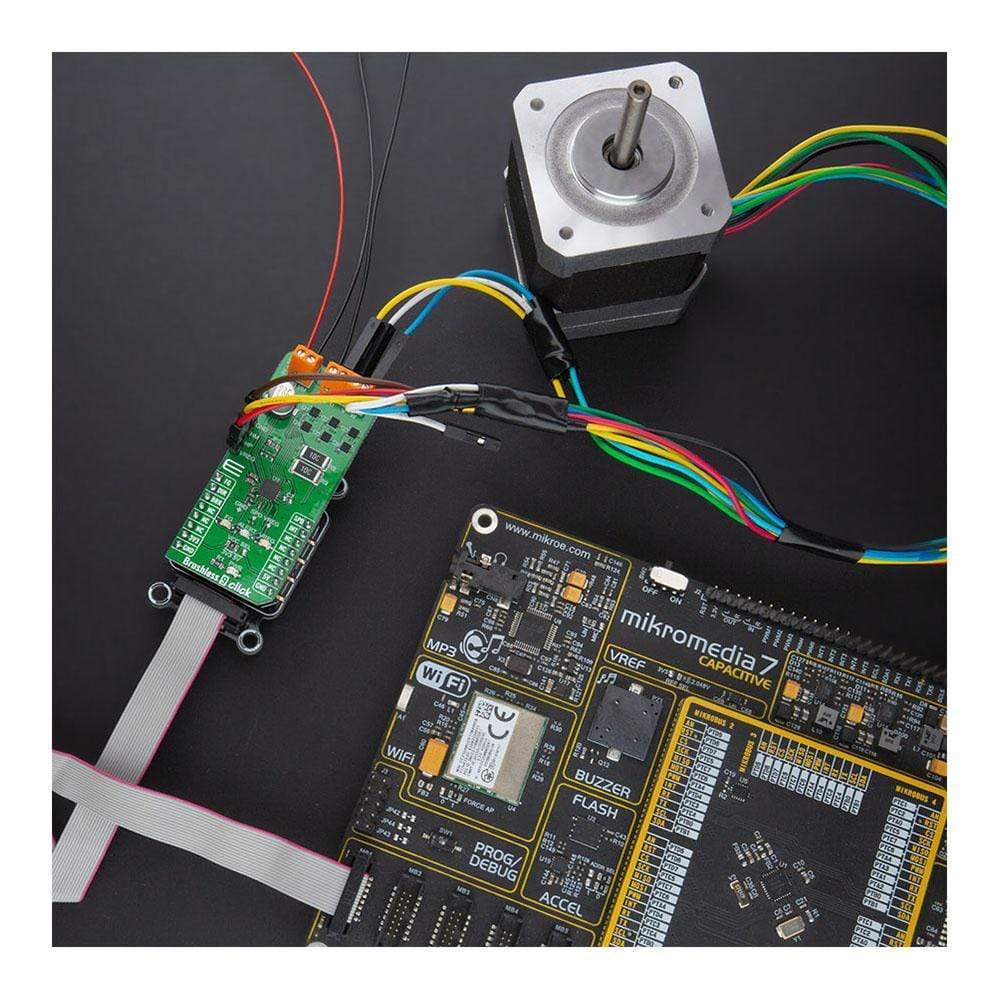
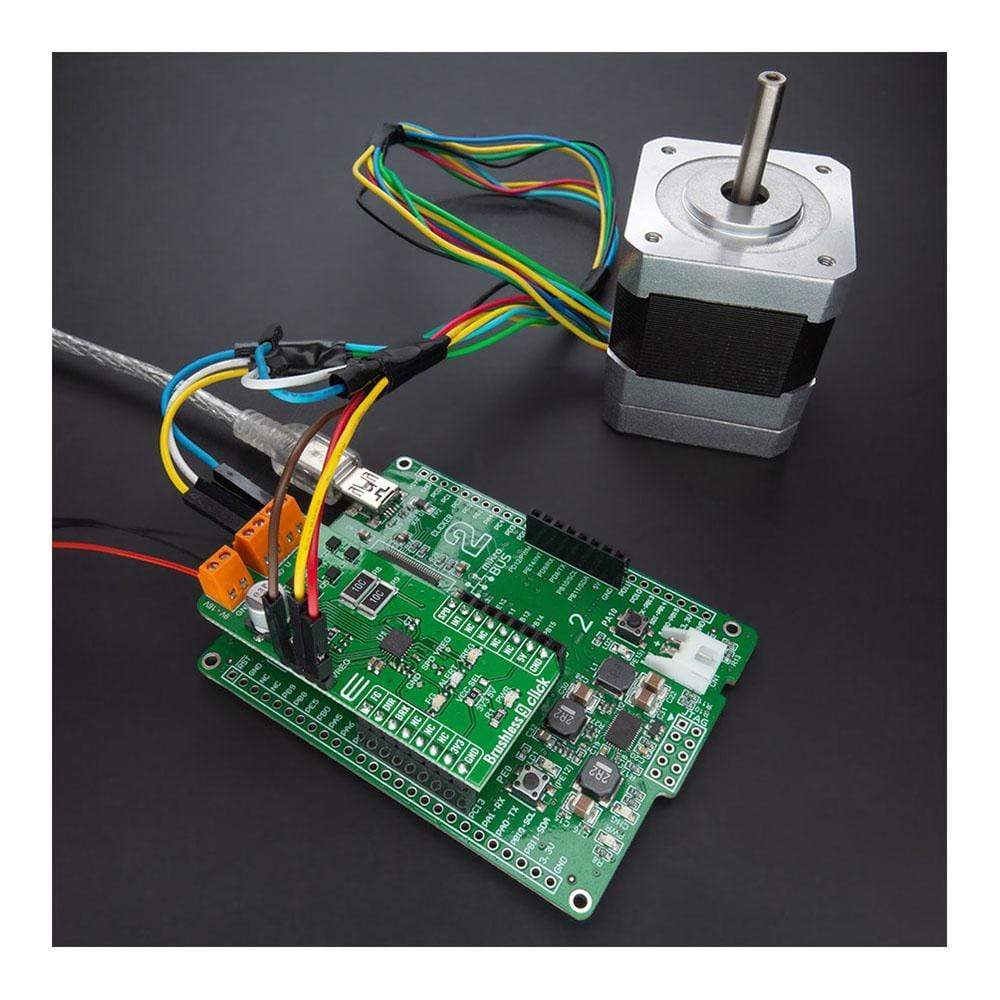
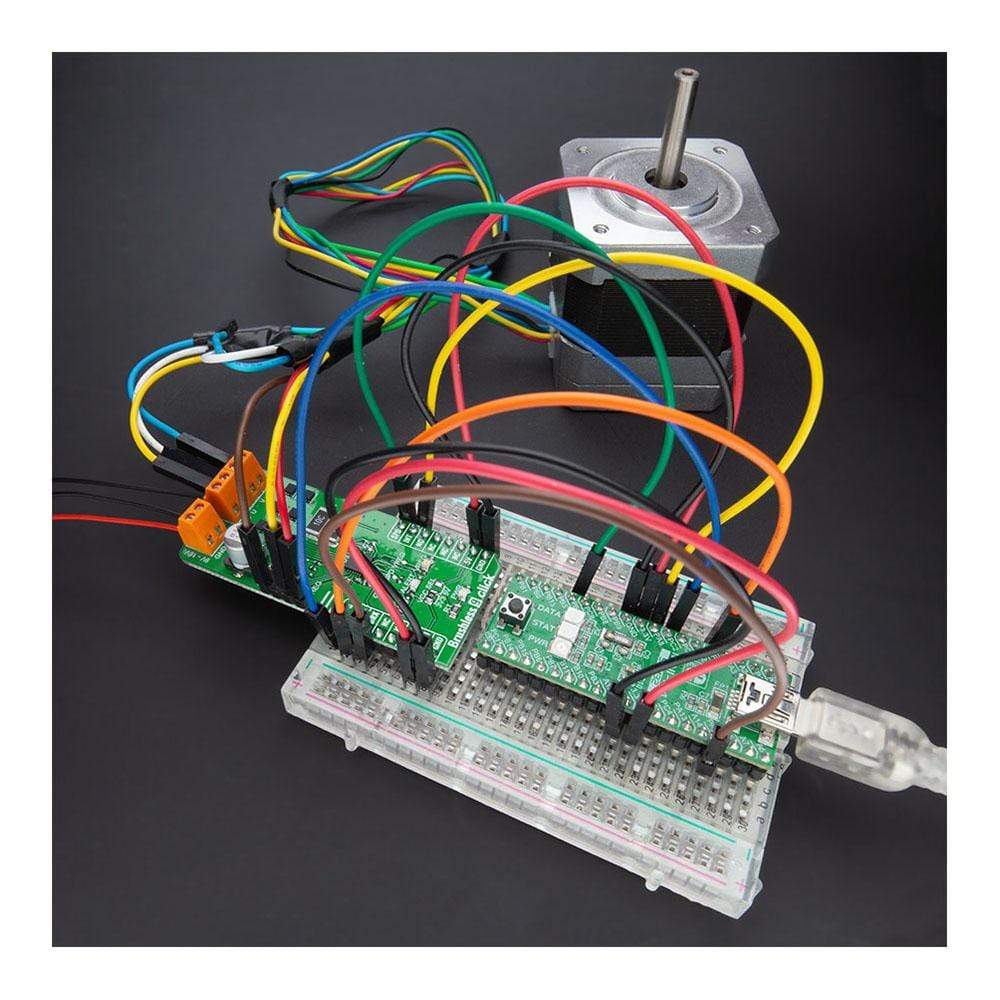
The Brushless 9 Click Board™ is a compact add-on board that controls BLDC motors with any MCU. This board features the TC78B027FTG, a 1-Hall sine-wave PWM controller for three-phase brushless DC motors from Toshiba Semiconductor. It simplifies the motor selection by using only one Hall sensor input that can be used with either a single Hall sensor motor or the more conventional 3 Hall sensor motors. Besides, it offers energy-saving and quiet motor operation, incorporating non-volatile memory and a closed-loop speed control function. This Click Board™ provides optimum operating efficiency in applications such as high-velocity server fans, blowers, and pumps.
The Brushless 9 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
La carte Click Board™ Brushless 9 est une carte complémentaire compacte qui contrôle les moteurs BLDC avec n'importe quel microcontrôleur. Cette carte est équipée du TC78B027FTG, un contrôleur PWM sinusoïdal à 1 effet Hall pour moteurs CC sans balais triphasés de Toshiba Semiconductor. Il simplifie la sélection du moteur en utilisant une seule entrée de capteur Hall qui peut être utilisée avec un seul moteur à capteur Hall ou les moteurs à 3 capteurs Hall plus conventionnels. En outre, il offre un fonctionnement silencieux et économe en énergie du moteur, intégrant une mémoire non volatile et une fonction de contrôle de vitesse en boucle fermée. Cette carte Click Board™ offre une efficacité de fonctionnement optimale dans des applications telles que les ventilateurs de serveur à grande vitesse, les souffleurs et les pompes.
La carte Click Board™ Brushless 9 est supportée par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette carte Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4387
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.022 kg
|
| Other | |
EAN |
8606027381478
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.