







Mikroelektronika d.o.o.
Carte à clic pour moteur à courant continu 6
Carte à clic pour moteur à courant continu 6
SKU: MIKROE-4114
Impossible de charger la disponibilité du service de retrait




Overview
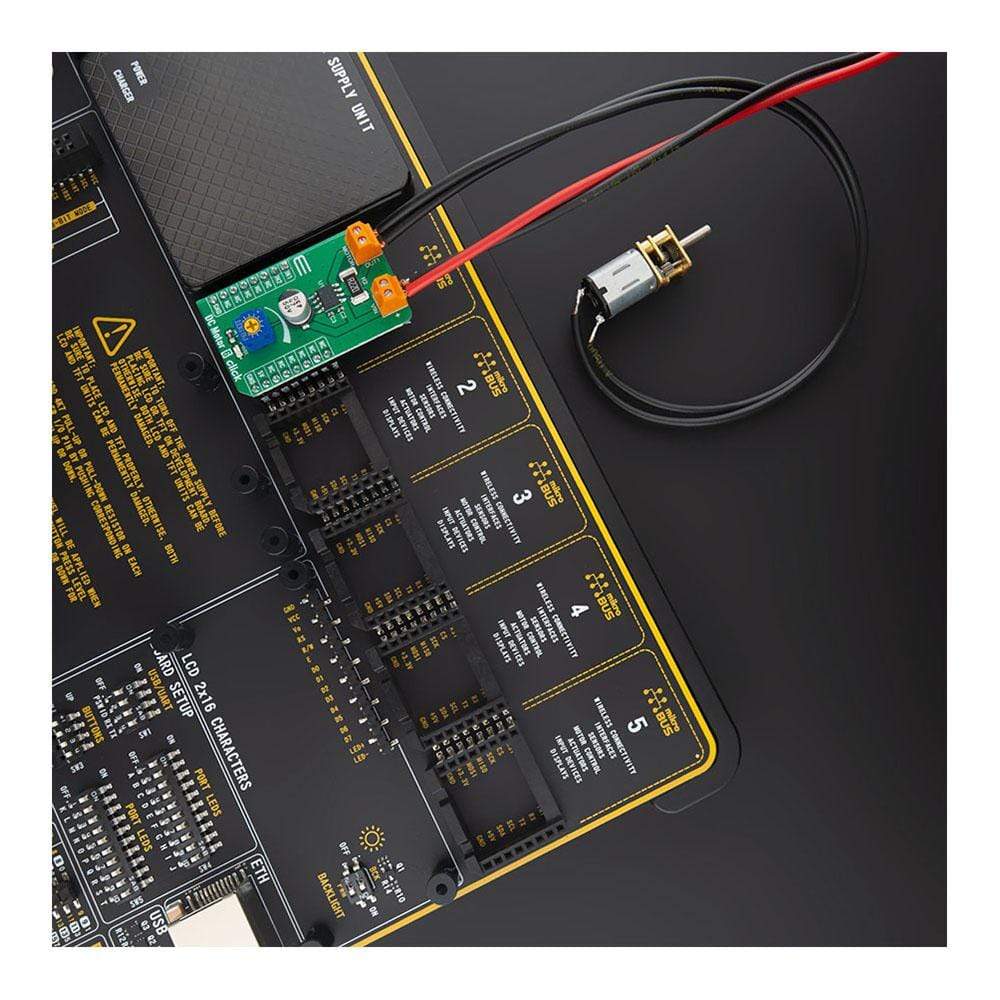
The DC Motor 6 Click Board™ is a PWM chopper type brushed DC motor driver, labelled as TB67H451FNG. This IC includes one channel of motor output block, using a wide range of supply voltages while delivering reasonably high current to the connected DC motors. Low ON-resistance MOSFETs and a PWM control help the TB67H451FNG exhibit lower heat generation thus efficient motor drive. Furthermore, the TB67H451FNG has two inputs, IN1 and IN2, which allow for the selection of the four operation modes; forward (clockwise), reverse (counter-clockwise), short break, and stop modes.
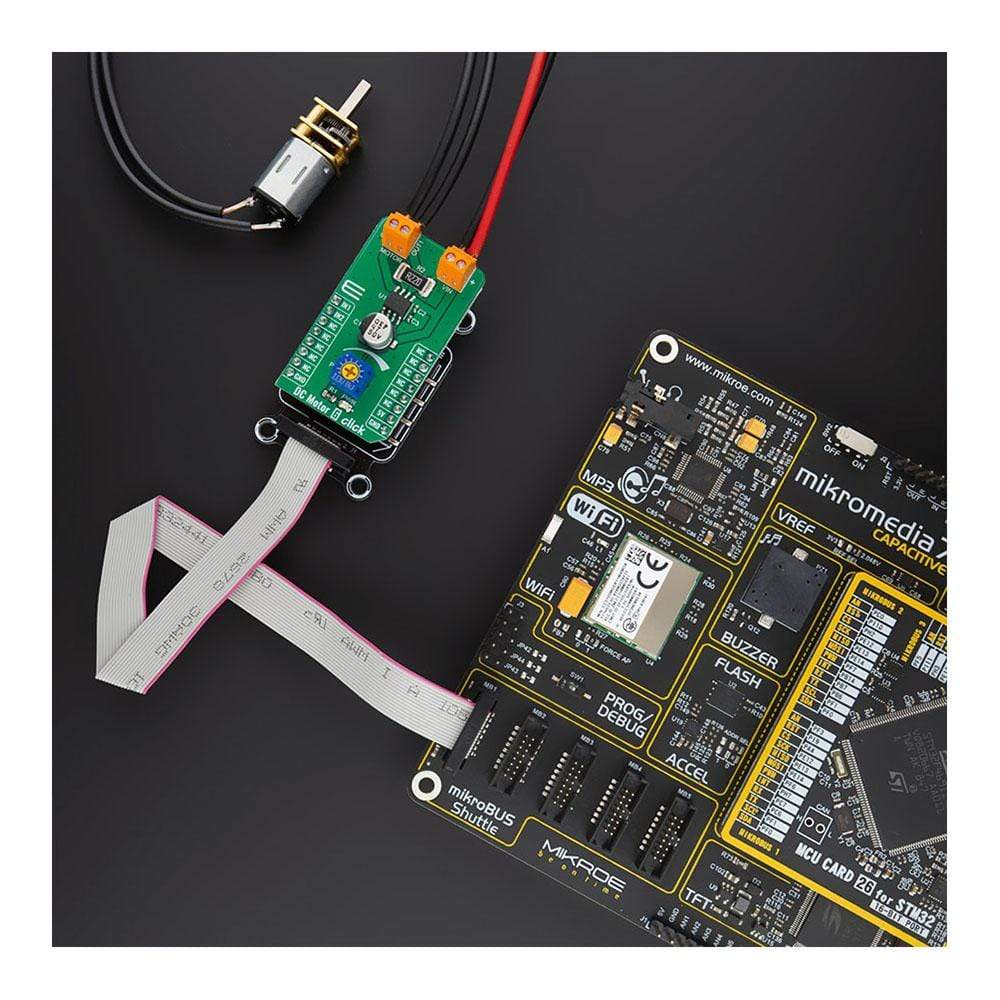
The DC Motor 6 Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Le DC Motor 6 Click Board™ est un pilote de moteur à courant continu à balais de type hacheur PWM, étiqueté TB67H451FNG. Ce circuit intégré comprend un canal de bloc de sortie moteur, utilisant une large gamme de tensions d'alimentation tout en fournissant un courant raisonnablement élevé aux moteurs à courant continu connectés. Les MOSFET à faible résistance à l'état passant et un contrôle PWM aident le TB67H451FNG à produire moins de chaleur, ce qui permet un entraînement efficace du moteur. De plus, le TB67H451FNG dispose de deux entrées, IN1 et IN2, qui permettent de sélectionner les quatre modes de fonctionnement : avant (sens horaire), arrière (sens antihoraire), pause courte et modes d'arrêt.
Le DC Motor 6 Click est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé de la prise mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4114
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606018717453
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.