







Mikroelektronika d.o.o.
Carte IMU 6DOF 5 clics
Carte IMU 6DOF 5 clics
SKU: MIKROE-4089
Impossible de charger la disponibilité du service de retrait


Overview
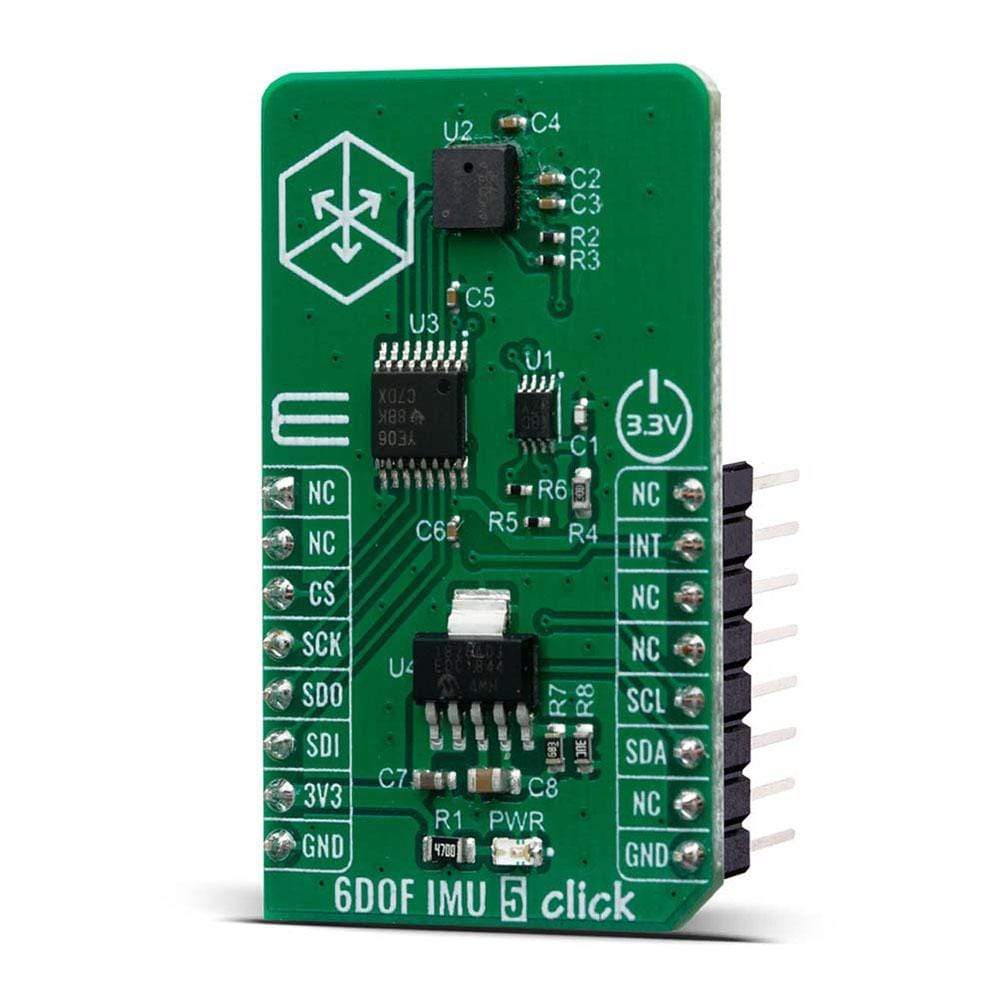
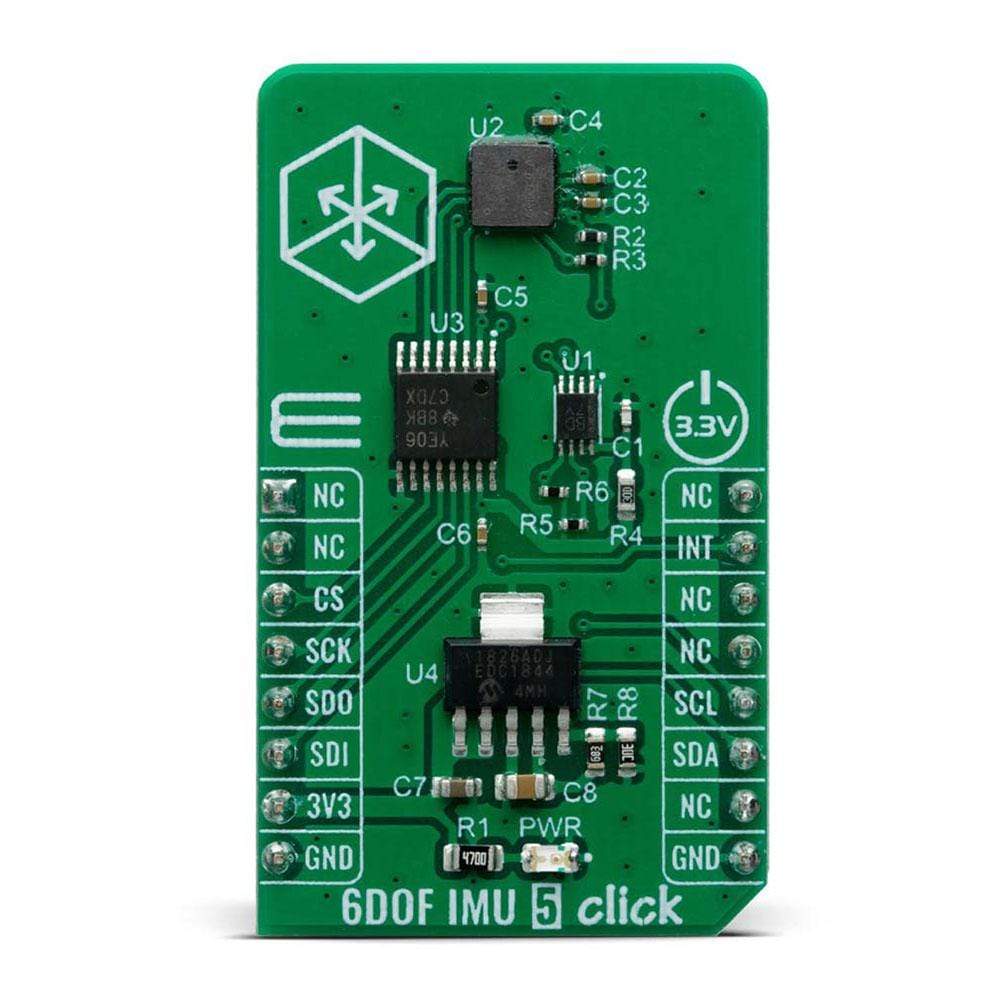
The 6DOF IMU 5 Click Board™ features a 7-Axis ICM-20789 chip from TDK, an integrated 6-axis inertial device that combines a 3-axis gyroscope, 3-axis accelerometer, and an ultra-low noise MEMS capacitive pressure sensor. This unique 7-Axis device offers great performance with an accuracy of ±1 Pa, an accuracy enabling altitude measurement differentials as small as 8.5 cm. The pressure sensor’s MEMS capacitive architecture provides the industry’s lowest noise at the lowest power, high sensor throughput, and temperature coefficient offset of ±0.5 Pa/°C. The combination of high accuracy elevation measurements, low power, and temperature stability makes it ideal for a wide range of motion tracking applications.
The 6DOF IMU 5 Click Board is supported by a mikroSDK-compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Le Carte Click Board™ à 6 degrés de liberté IMU 5 Le capteur de pression 7 axes TDK est doté d'une puce ICM-20789 à 7 axes de TDK, un dispositif inertiel à 6 axes intégré qui combine un gyroscope à 3 axes, un accéléromètre à 3 axes et un capteur de pression capacitif MEMS à très faible bruit. Ce dispositif unique à 7 axes offre d'excellentes performances avec une précision de ±1 Pa, une précision permettant des différentiels de mesure d'altitude aussi faibles que 8,5 cm. L'architecture capacitive MEMS du capteur de pression offre le bruit le plus faible de l'industrie à la plus faible puissance, un débit de capteur élevé et un décalage du coefficient de température de ±0,5 Pa/°C. La combinaison de mesures d'élévation de haute précision, de faible puissance et de stabilité de température le rend idéal pour une large gamme d'applications de suivi de mouvement.
La carte Click Board 6DOF IMU 5 est prise en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette carte Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4089
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606018717316
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.