


Mikroelektronika d.o.o.
Carte IMU 6DOF à 6 clics
Carte IMU 6DOF à 6 clics
SKU: MIKROE-4044
Impossible de charger la disponibilité du service de retrait


Overview
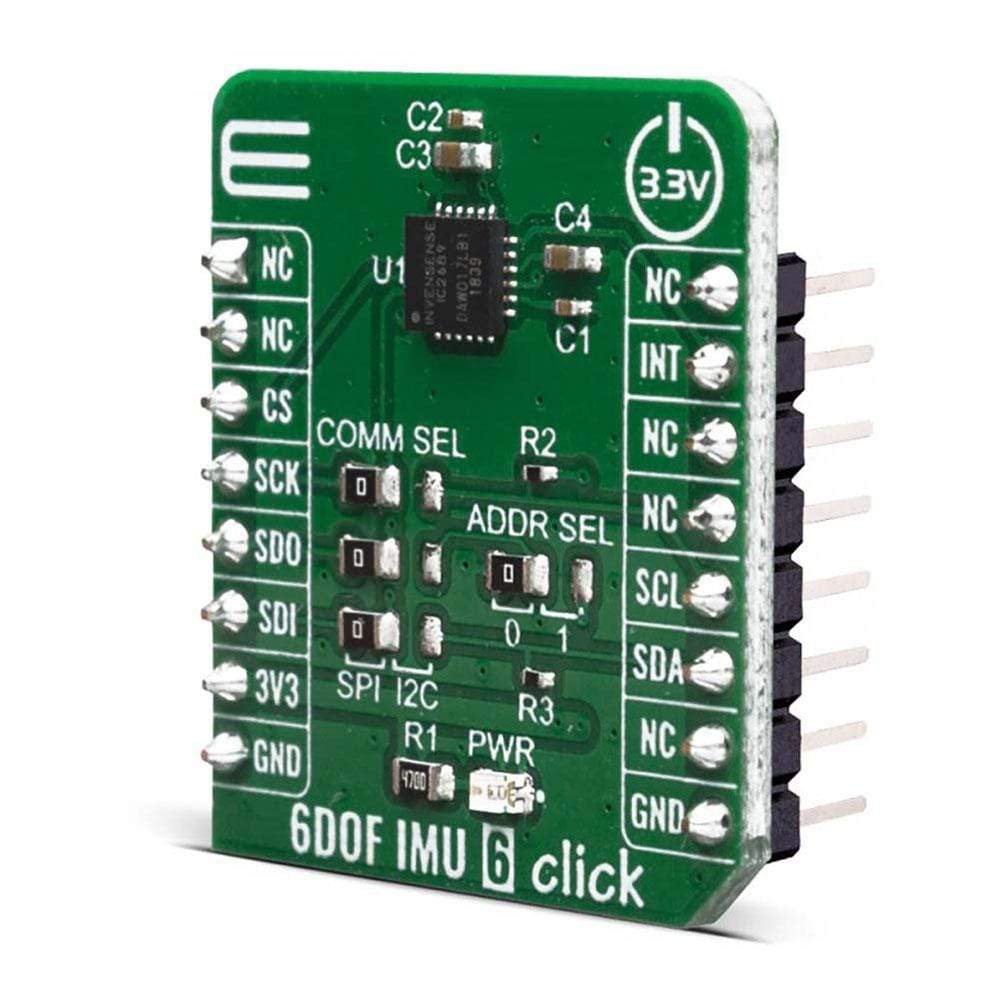
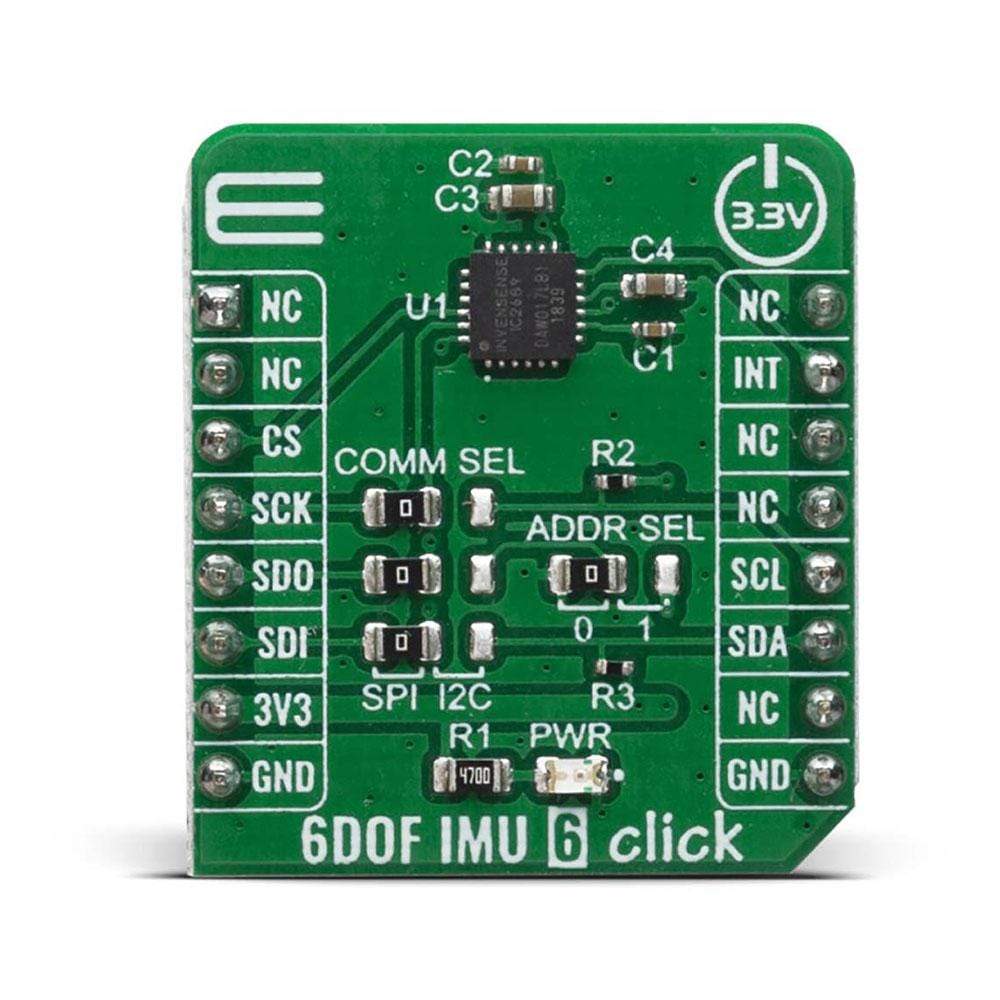
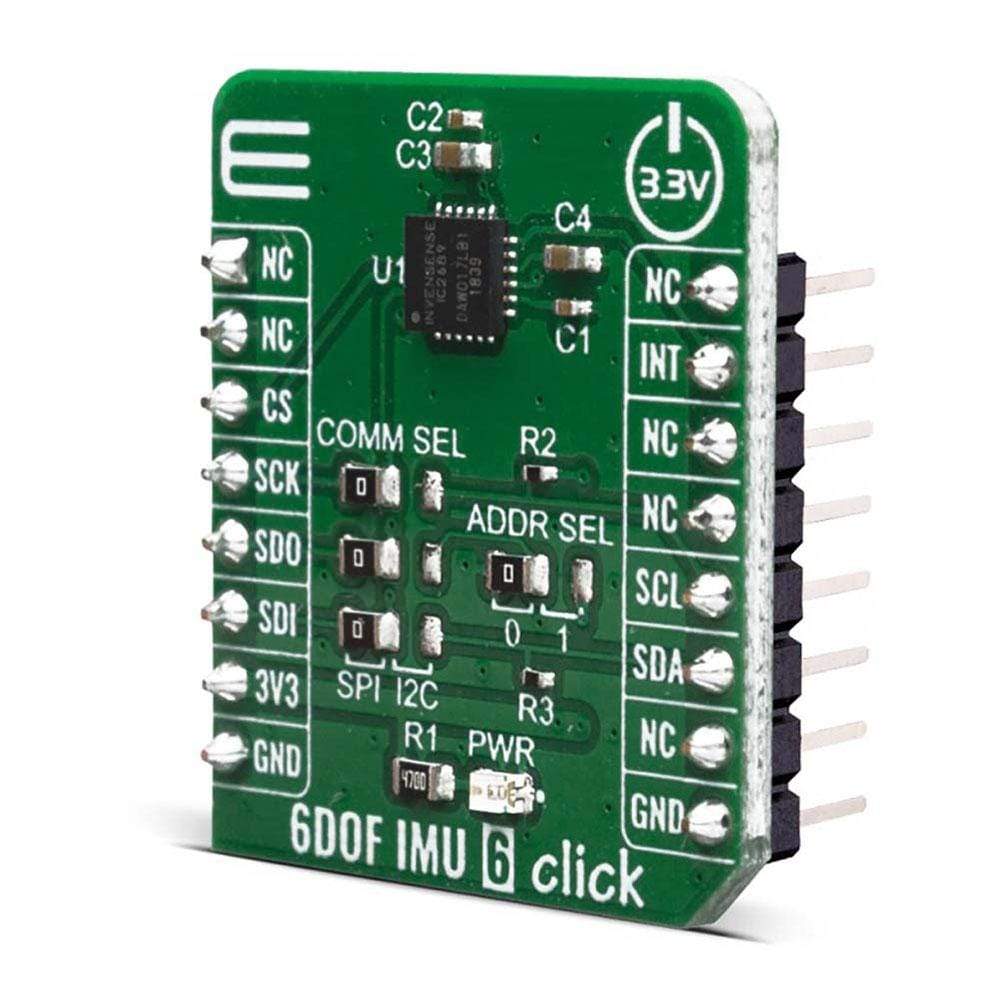
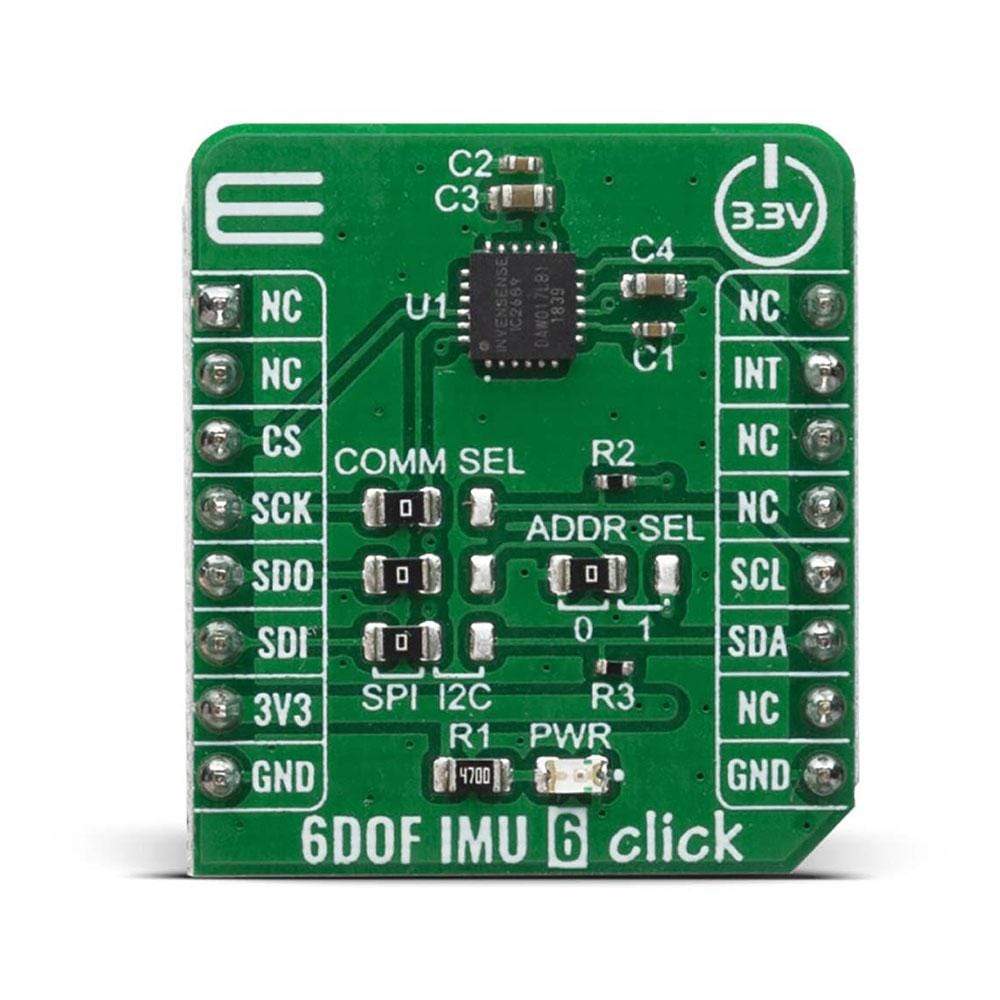
The 6DOF IMU 6 Click Board™ features a 6-axis motion tracking device that combines a 3-axis gyroscope, a 3-axis accelerometer, and a Digital Motion Processor™ (DMP) labelled as ICM-20689. The ICM-20689 from company TDK InvenSense includes on-chip 16-bit ADCs, programmable digital filters, an embedded temperature sensor, and programmable interrupts.
The gyroscope and accelerometer are full-scale range, user-programmable sensors with factory-calibrated initial sensitivity for reduced production-line calibration requirements.
Downloads
Le 6DOF IMU 6 Click Board™ est doté d'un dispositif de suivi de mouvement à 6 axes qui combine un gyroscope à 3 axes, un accéléromètre à 3 axes et un processeur de mouvement numérique (DMP) étiqueté ICM-20689. L'ICM-20689 de la société TDK InvenSense comprend des ADC 16 bits intégrés, des filtres numériques programmables, un capteur de température intégré et des interruptions programmables.
Le gyroscope et l'accéléromètre sont des capteurs à grande échelle, programmables par l'utilisateur, avec une sensibilité initiale calibrée en usine pour des exigences d'étalonnage réduites sur la ligne de production.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4044
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.016 kg
|
| Other | |
EAN |
8606018717088
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.