







Mikroelektronika d.o.o.
Tableau de clic du compteur d'index
Tableau de clic du compteur d'index
SKU: MIKROE-4005
Impossible de charger la disponibilité du service de retrait


Overview
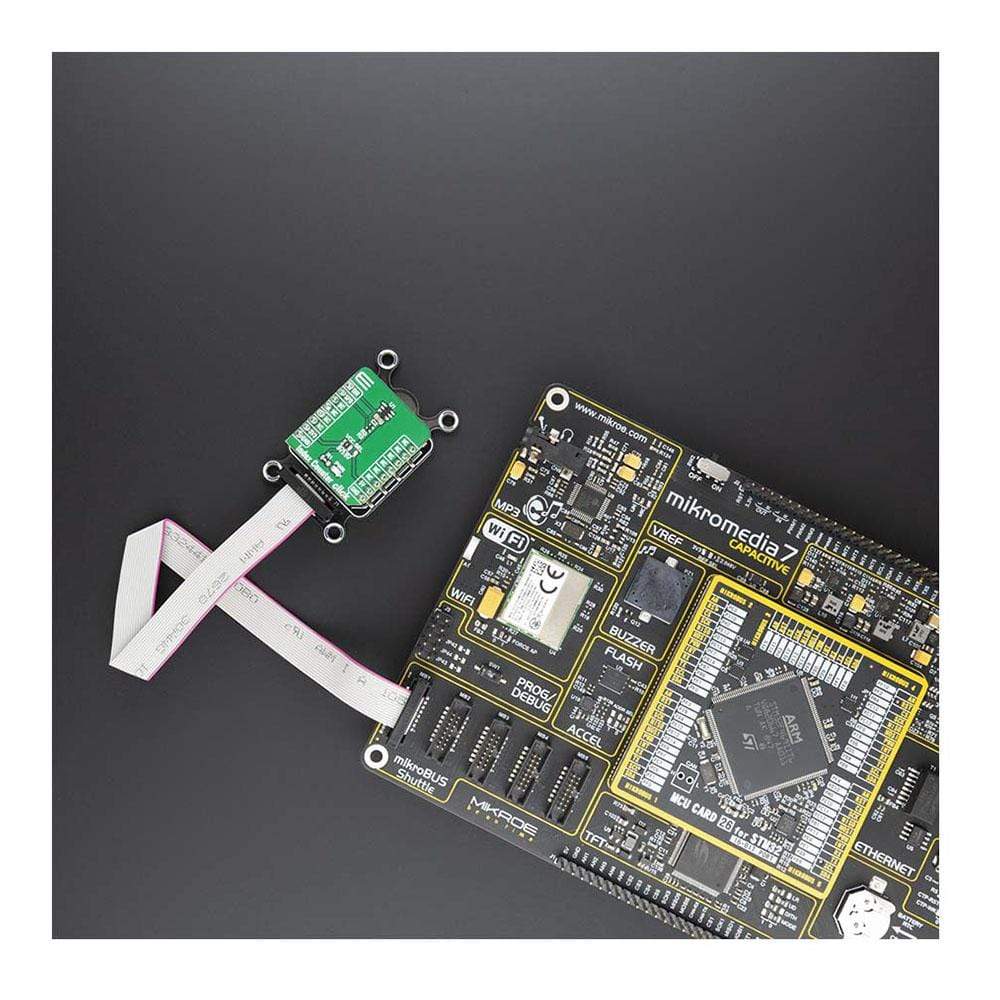
The Index Counter Click Board™ is a simple prototyping high precision Hall-Effect switch solution with direction detection. This board is hosting TLE4966K an integrated circuit dual Hall-effect sensor from Infineon. The sensor is designed specifically for highly accurate applications which use a rotating pole wheel since offers high sensitivity and high stability of the magnetic switching points. Since this sensor is based on two hall probes that provide information about the direction and speed of the moving wheel, this makes this product an excellent choice for applications such as index counting, rotational speed and direction applications, motor-driven position systems.
The Index Counter Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
L' Index Counter Click Board™ est une solution de prototypage simple de commutateur à effet Hall de haute précision avec détection de direction. Cette carte héberge le TLE4966K, un capteur à double effet Hall à circuit intégré d'Infineon. Le capteur est conçu spécifiquement pour les applications de haute précision qui utilisent une roue polaire rotative car il offre une sensibilité élevée et une grande stabilité des points de commutation magnétiques. Étant donné que ce capteur est basé sur deux sondes à effet Hall qui fournissent des informations sur la direction et la vitesse de la roue en mouvement, cela fait de ce produit un excellent choix pour des applications telles que le comptage d'index, les applications de vitesse et de direction de rotation, les systèmes de positionnement motorisés.
Le Index Counter Click Board™ est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Ce Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4005
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.016 kg
|
| Other | |
EAN |
8606018718320
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.