







Mikroelektronika d.o.o.
Carte IMU 6DOF 7 Click
Carte IMU 6DOF 7 Click
SKU: MIKROE-3776
Impossible de charger la disponibilité du service de retrait

Overview
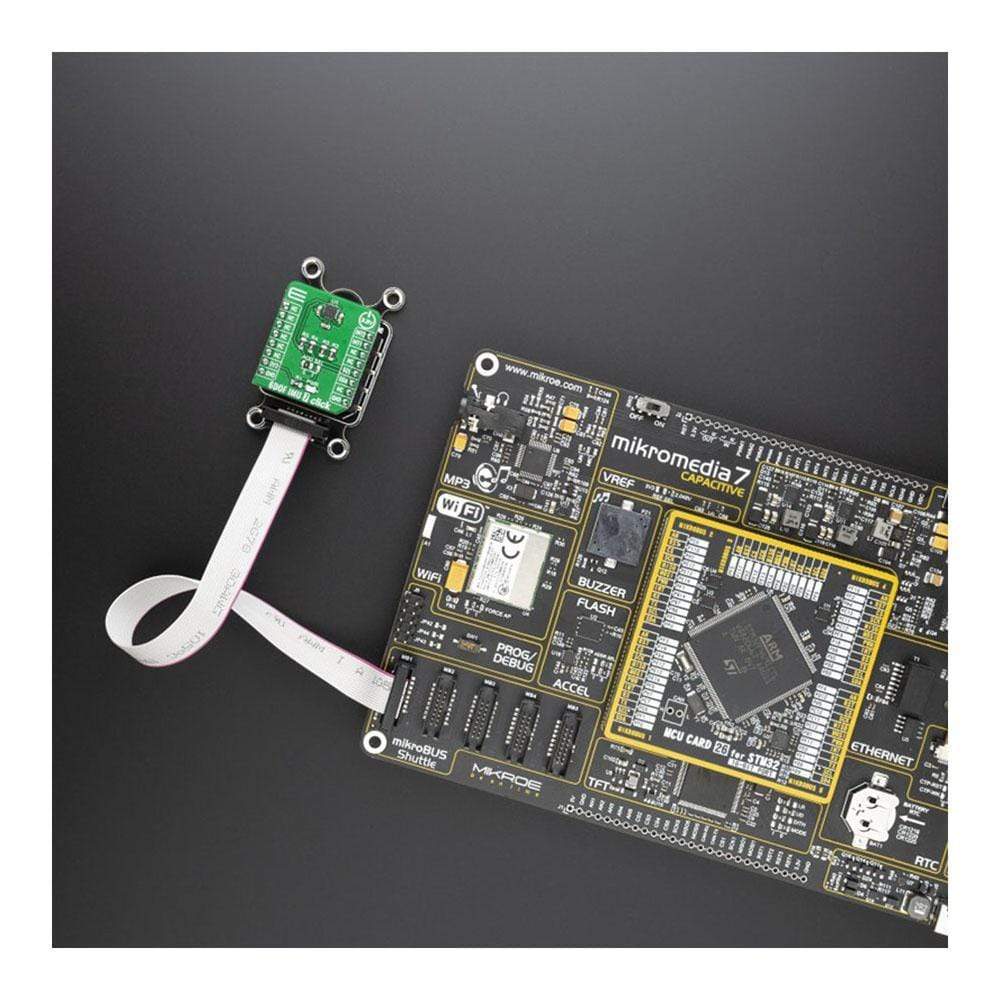
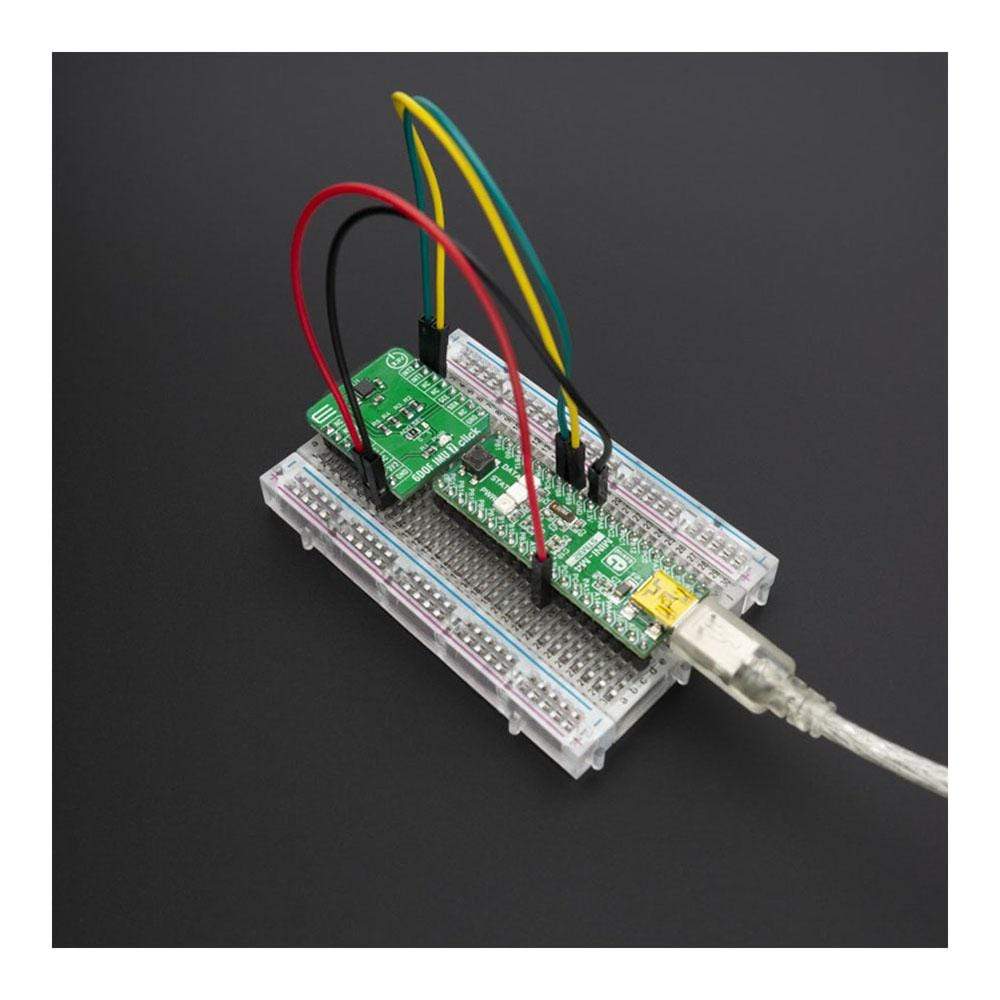
The 6DOF IMU 7 Click Board™ is an advanced 6-axis motion tracking Click Board™, which utilizes the ICM-20649, a high-performance integrated motion sensor, equipped with a 3-axis gyroscope, and a 3-axis accelerometer. There is a MEMS structure hermetically sealed and bonded at the wafer level. Data streams from each axis are fed to a signal processing engine, offering calibrated readings of each axis over the I2C interface. This Click Board™ represents an ideal solution for developing applications in sports, wearable sensors and high impact applications.
6DOF IMU 7 Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Le 6DOF IMU 7 Click Board™ est un Click Board™ de suivi de mouvement 6 axes avancé, qui utilise l'ICM-20649, un capteur de mouvement intégré hautes performances, équipé d'un gyroscope 3 axes et d'un accéléromètre 3 axes. Il existe une structure MEMS hermétiquement scellée et collée au niveau de la plaquette. Les flux de données de chaque axe sont transmis à un moteur de traitement du signal, offrant des lectures calibrées de chaque axe via l'interface I2C. Ce Click Board™ représente une solution idéale pour le développement d'applications dans le domaine du sport, des capteurs portables et des applications à fort impact.
6DOF IMU 7 clics est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3776
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.017 kg
|
| Other | |
EAN |
8606018719976
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.