




Mikroelektronika d.o.o.
Planche à clic Stepper 13
Planche à clic Stepper 13
SKU: MIKROE-3736
Impossible de charger la disponibilité du service de retrait

Overview
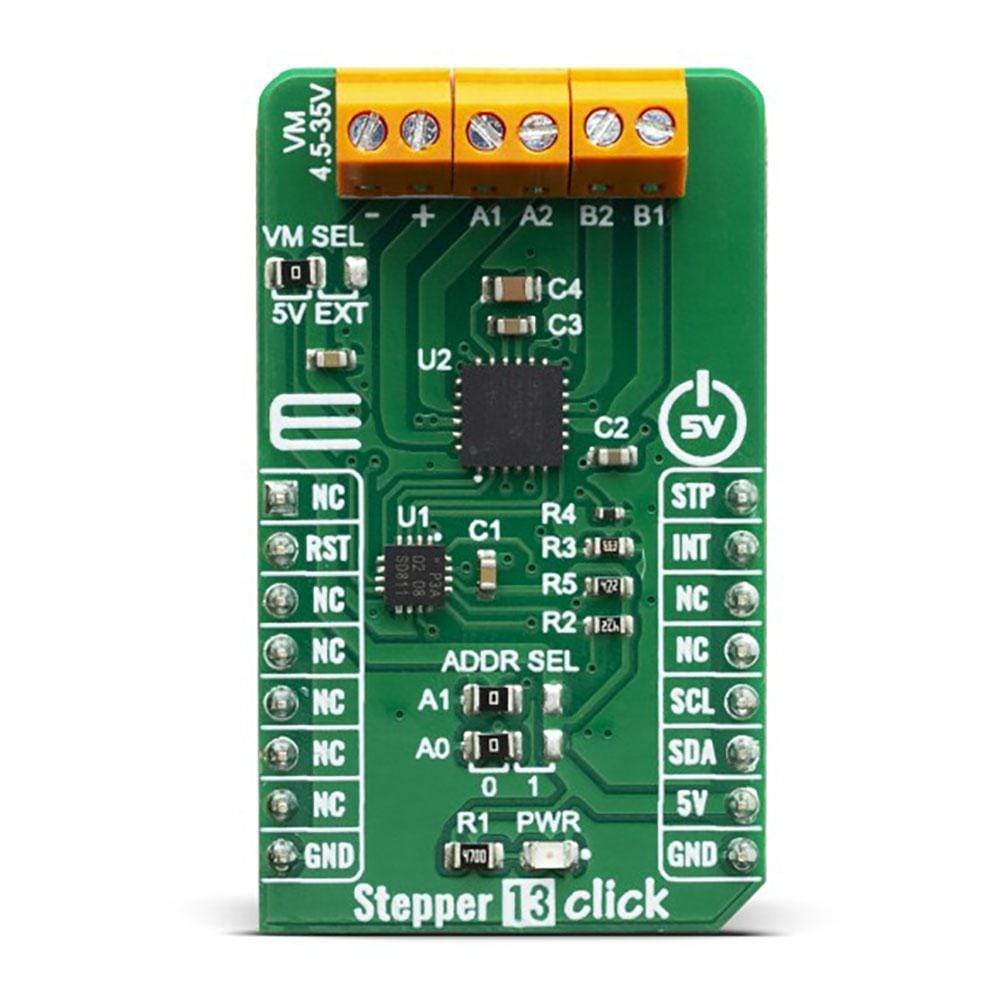
The Stepper 13 Click Board™ is a bipolar step motor driver. It features an H-bridge bipolar step motor driver, which supports full-, half-, quarter-, or eighth-step modes. Stepper 13 click also carries a port expander so that the communication can be done with minimal pins through the mikroBUS™ I2C bus. This click board™ offers thermal protection and integrated kickback voltage protection, it has a wide range of input voltage, protection against current shoot-through the H-Bridge and high current capability. These features make Stepper 13 click an ideal solution for driving motors in any application that demands a precise and safe step motor driver.
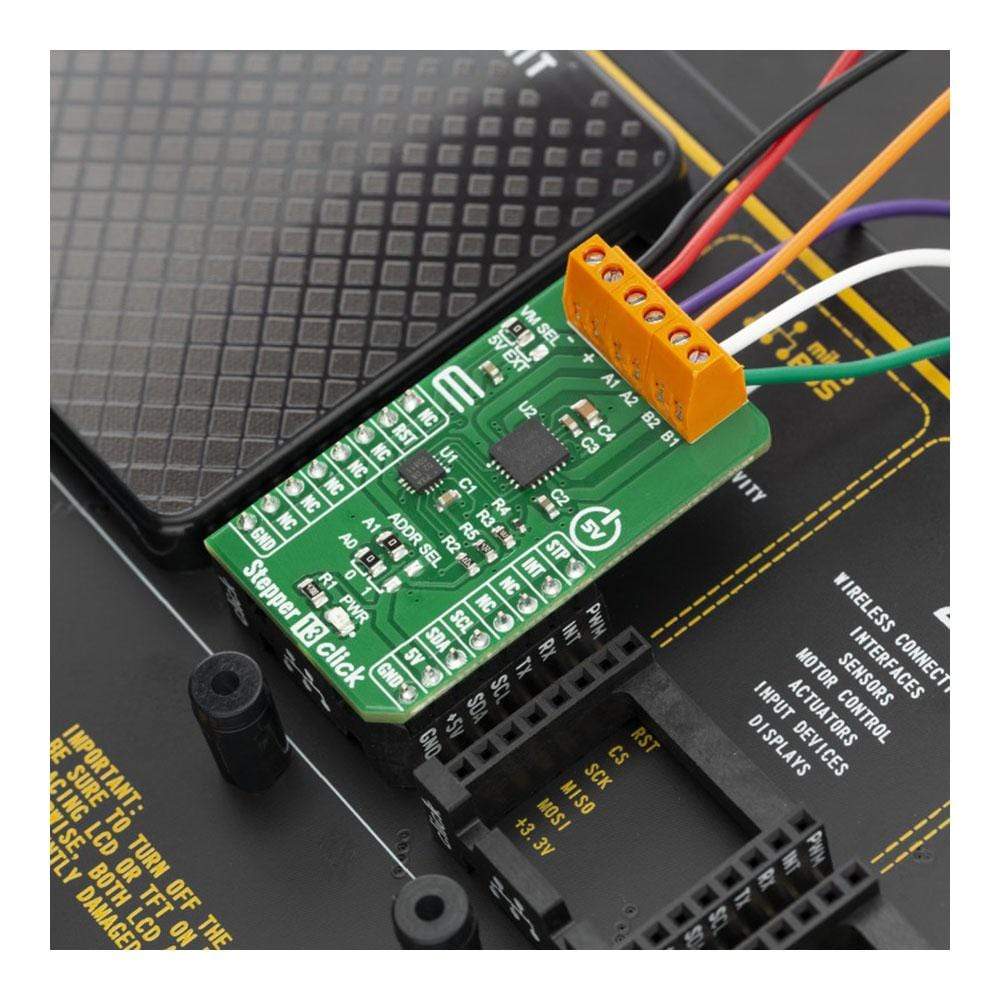
The Stepper 13 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Le Stepper 13 Click Board™ est un pilote de moteur pas à pas bipolaire. Il est doté d'un pilote de moteur pas à pas bipolaire à pont en H, qui prend en charge les modes pas à pas complet, demi-pas, quart de pas ou huitième de pas. Le Stepper 13 Click est également équipé d'un extenseur de port afin que la communication puisse être effectuée avec un minimum de broches via le bus I2C mikroBUS™. Ce click board™ offre une protection thermique et une protection intégrée contre les tensions de retour, il dispose d'une large plage de tension d'entrée, d'une protection contre les courants de pointe à travers le pont en H et d'une capacité de courant élevée. Ces caractéristiques font du Stepper 13 Click une solution idéale pour piloter des moteurs dans toute application qui exige un pilote de moteur pas à pas précis et sûr.
Le Stepper 13 Click Board™ est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Ce Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3736
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606018716838
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.