




Mikroelektronika d.o.o.
Carte à clic Magneto 4
Carte à clic Magneto 4
SKU: MIKROE-3522
Impossible de charger la disponibilité du service de retrait

Overview
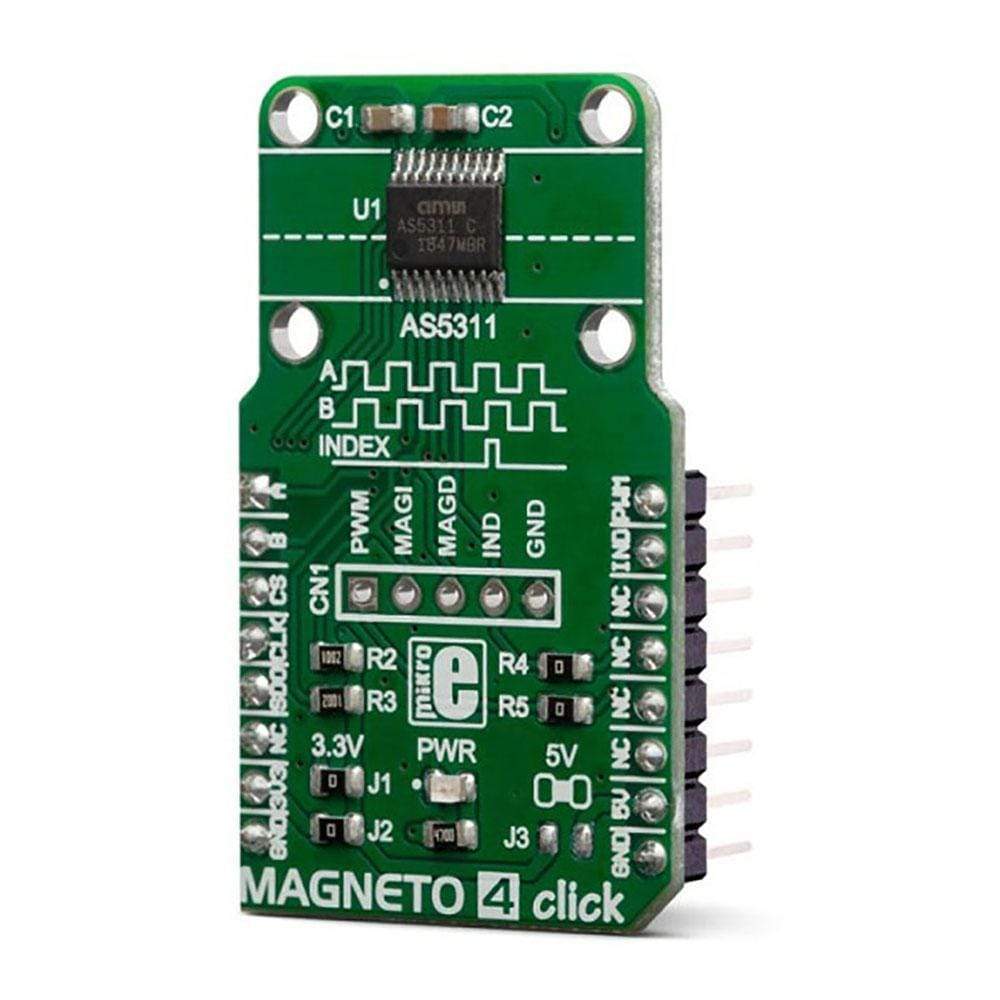
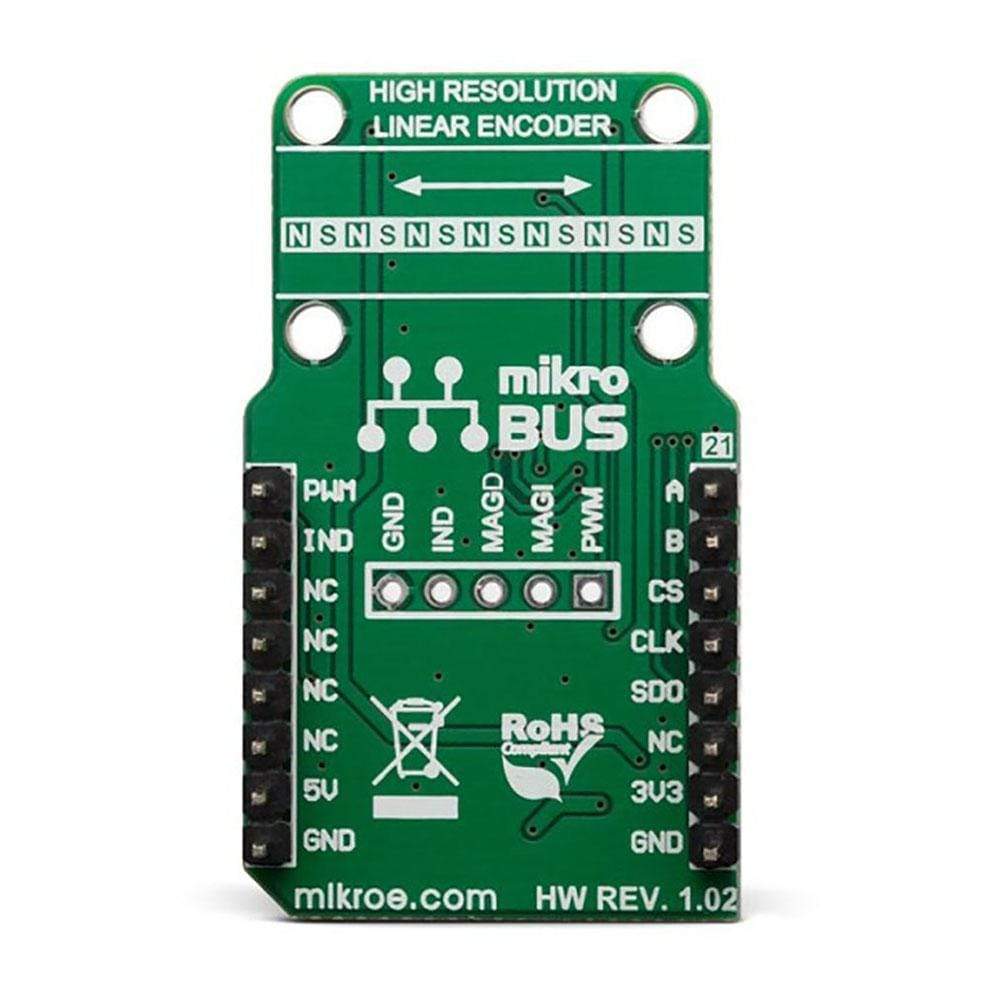
The Magneto 4 Click Board™ is a high-resolution magnetic encoder Click Board™ which allows contactless motion sensing down to 0.5µm. It features the AS5311, a complete integrated solution with Hall elements, low-noise analog front-end, and digital signal processing (DSP) sections, on the same die. Thanks to the internal DSP processing, the AS5311 can output the absolute movement detection over the serial interface as a bit stream, or as a PWM signal. The AS5311 IC also offers a high-resolution incremental output with the additional index option. The device is supposed to be used with the multi-pole magnetic strip or ring.
Downloads
Le Magneto 4 Click Board™ est un encodeur magnétique haute résolution Click Board™ qui permet la détection de mouvement sans contact jusqu'à 0,5 µm. Il intègre l'AS5311, une solution intégrée complète avec des éléments Hall, un frontal analogique à faible bruit et des sections de traitement du signal numérique (DSP), sur la même puce. Grâce au traitement DSP interne, l'AS5311 peut générer la détection de mouvement absolue sur l'interface série sous forme de flux binaire ou de signal PWM. Le circuit intégré AS5311 offre également une sortie incrémentale haute résolution avec l'option d'index supplémentaire. L'appareil est censé être utilisé avec la bande ou l'anneau magnétique multipolaire.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3522
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606018715480
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.