


Mikroelektronika d.o.o.
Bouton G Click Board
Bouton G Click Board
SKU: MIKROE-3299
Impossible de charger la disponibilité du service de retrait


Overview
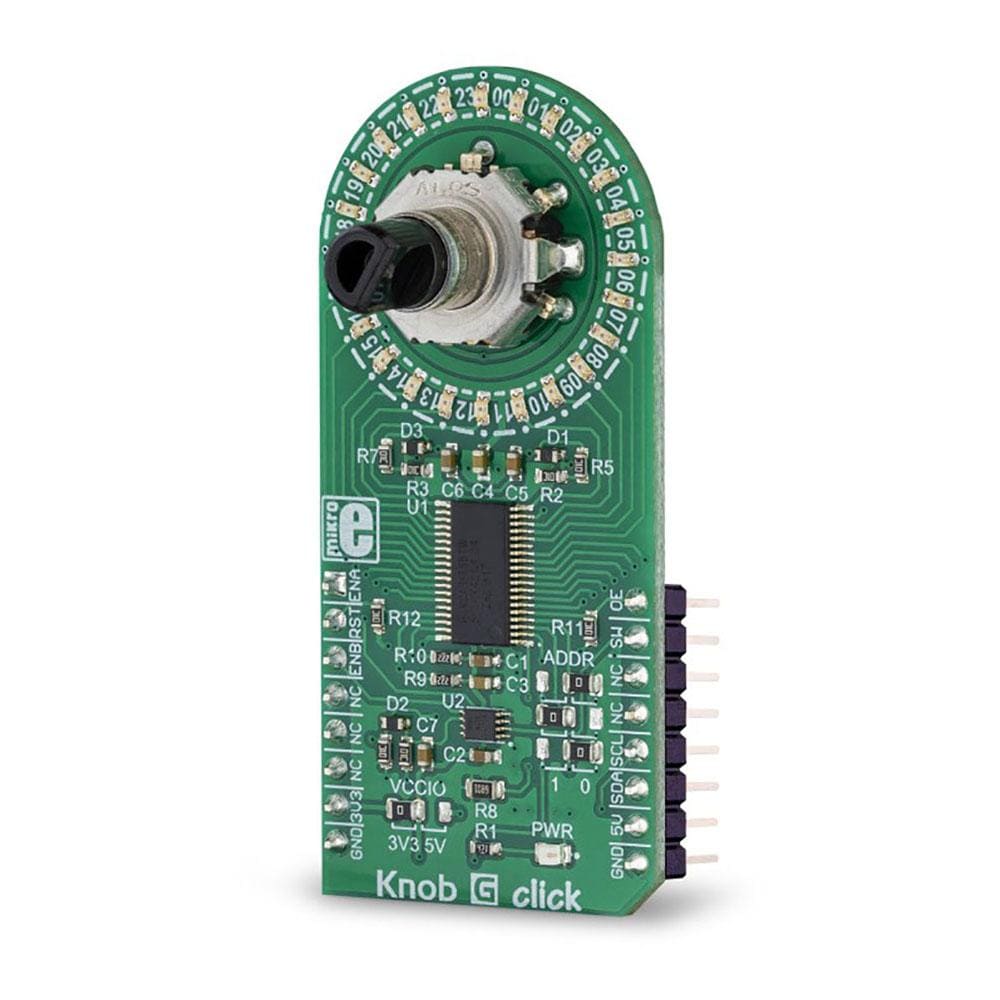
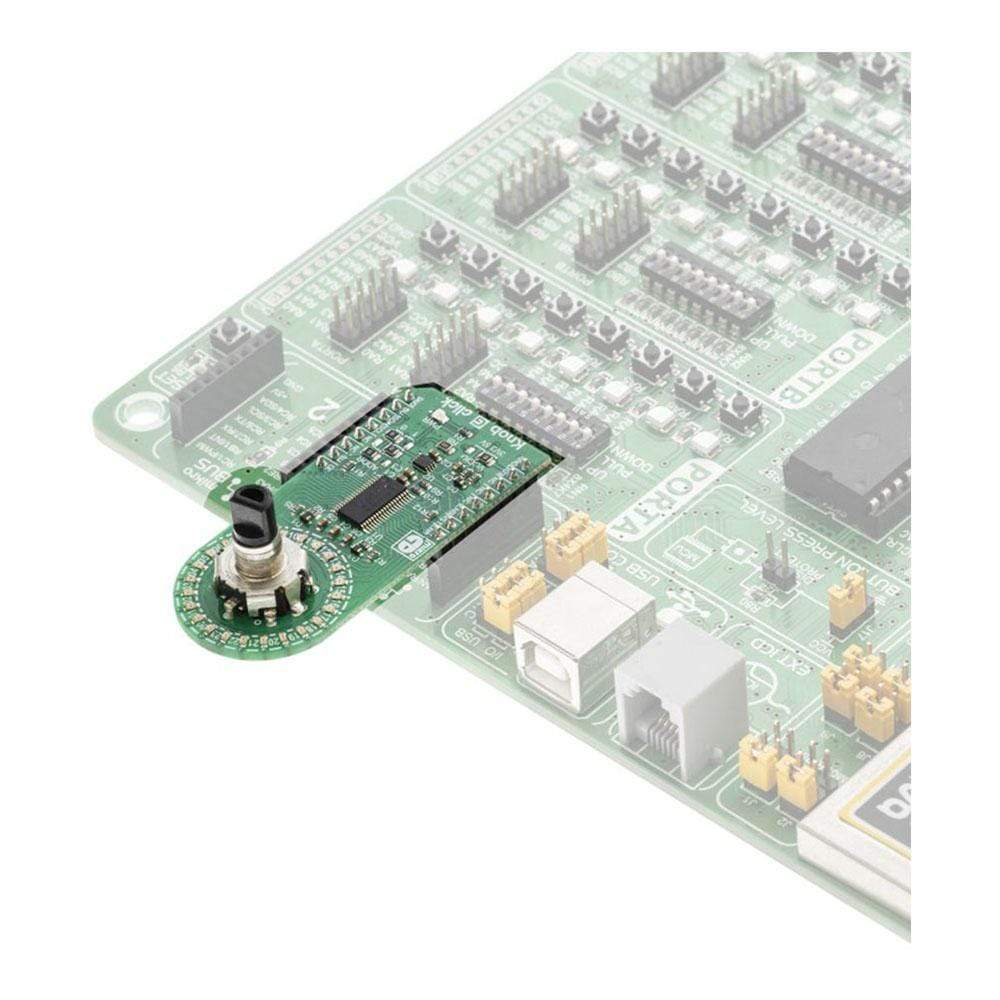
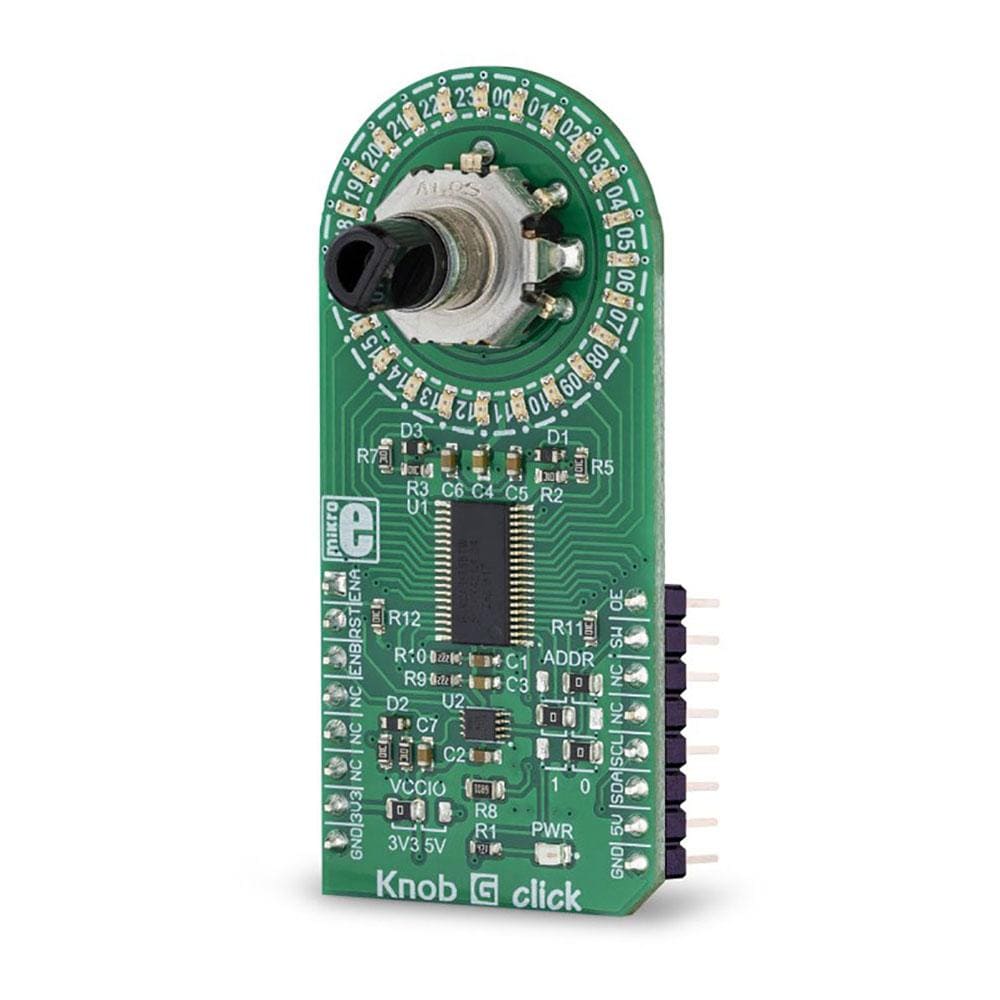
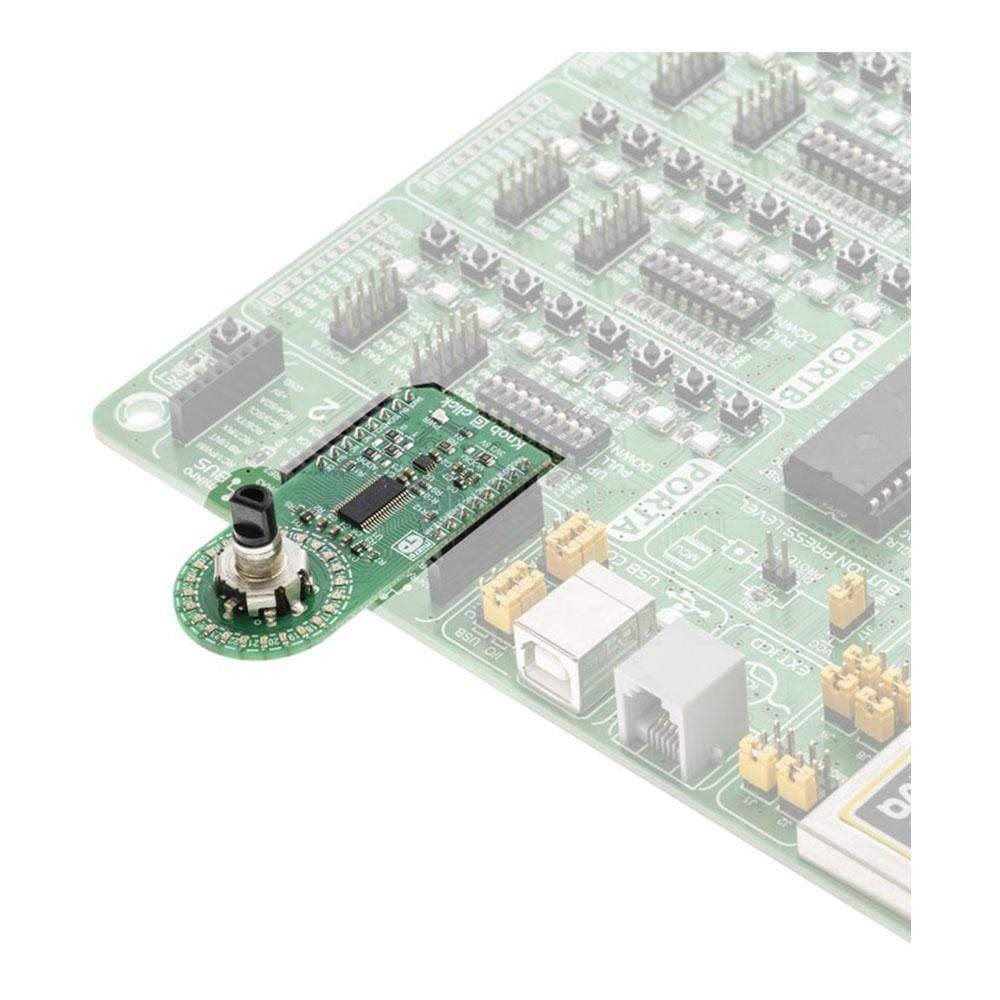
The Knob G Click Board™ features a combination of high-quality quadrature rotary encoder, and a LED ring composed of 24 individual green LEDs. Outputs of the rotary encoder are processed by a debouncing circuitry, which ensures reliable switching action, making the encoder directly usable in interrupt service routines (ISR) without the need for a bulky debouncing code. The 24-segment LED ring is driven by an advanced and flexible LED driver IC, which can dim each LED individually, allowing various lighting effects to be programmed. The LED ring is independent of the encoder, and it can be used as a very flexible position or value indicator.
Downloads
Le Knob G Click Board™ est doté d'une combinaison d'encodeur rotatif en quadrature de haute qualité et d'un anneau LED composé de 24 LED vertes individuelles. Les sorties de l'encodeur rotatif sont traitées par un circuit anti-rebond, qui garantit une action de commutation fiable, rendant l'encodeur directement utilisable dans les routines de service d'interruption (ISR) sans avoir besoin d'un code anti-rebond volumineux. L'anneau LED à 24 segments est piloté par un circuit intégré de commande LED avancé et flexible, qui peut atténuer chaque LED individuellement, ce qui permet de programmer divers effets d'éclairage. L'anneau LED est indépendant de l'encodeur et peut être utilisé comme un indicateur de position ou de valeur très flexible.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3299
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.022 kg
|
| Other | |
EAN |
8606018714148
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.