





Mikroelektronika d.o.o.
Carte à clic MCP2542
Carte à clic MCP2542
SKU: MIKROE-2299
Impossible de charger la disponibilité du service de retrait

Overview
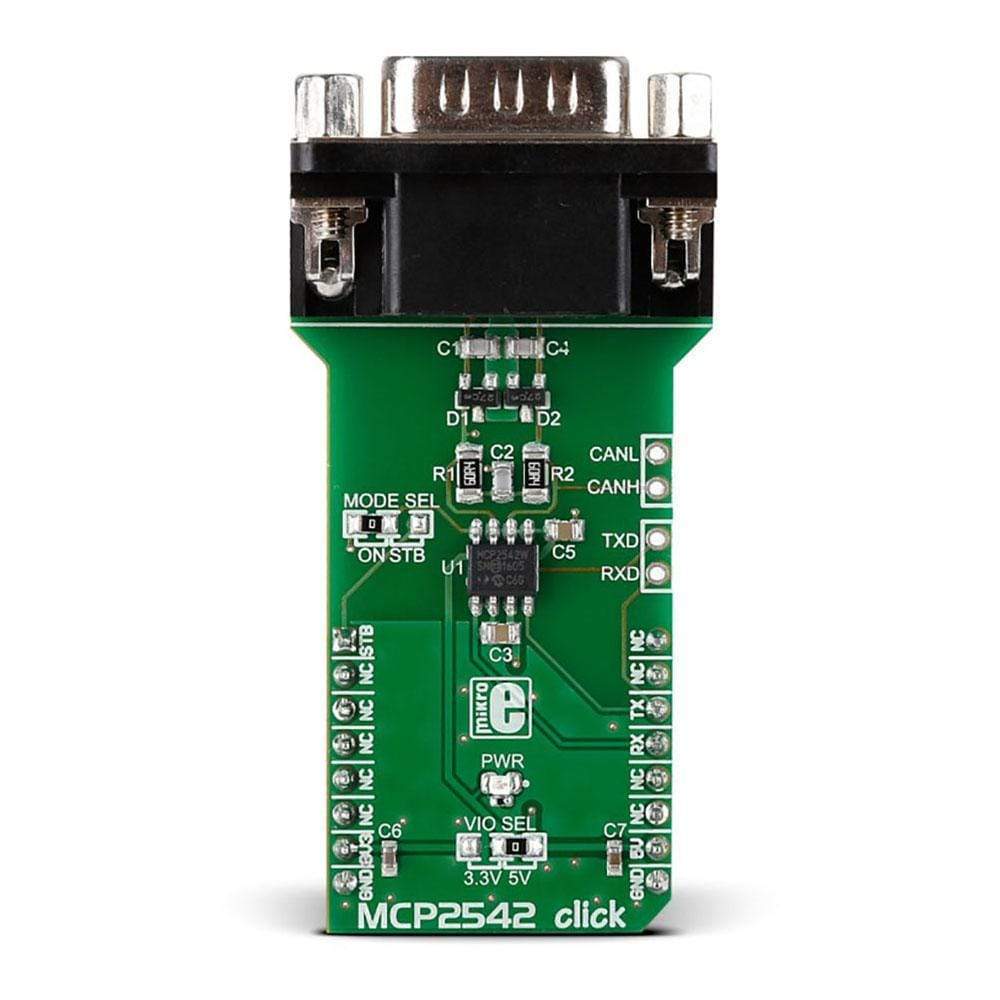
The MCP2542 Click Board™ is the CAN bus transceiver, which allows TTL/CMOS level signals typically found on MCUs, to be used for the communication via the CAN bus, which uses the higher voltage levels and differential signals. In addition, this Click Board™ protects the sensitive MCU part of the device from excessive voltage spikes and electrostatic discharges (ESD), typically observed in automotive systems, where CAN communication is extensively used.
The MCP2542 Click Board™ uses the MCP2542WFD, a CAN FD transceiver, which offers a robust CAN bus interface, with ESD protection up to 13 kV, permanent dominant detection on TXD and CAN bus, battery short circuit and electrical transients suppression on the CAN bus, thermal protection, and more.
Downloads
Le MCP2542 Click Board™ est un émetteur-récepteur de bus CAN qui permet d'utiliser les signaux de niveau TTL/CMOS généralement présents sur les microcontrôleurs pour la communication via le bus CAN, qui utilise les niveaux de tension plus élevés et les signaux différentiels. De plus, ce Click Board™ protège la partie sensible du microcontrôleur de l'appareil contre les pics de tension excessifs et les décharges électrostatiques (ESD), généralement observés dans les systèmes automobiles, où la communication CAN est largement utilisée.
Le MCP2542 Click Board™ utilise le MCP2542WFD, un émetteur-récepteur CAN FD, qui offre une interface de bus CAN robuste, avec protection ESD jusqu'à 13 kV, détection dominante permanente sur TXD et bus CAN, suppression des courts-circuits de batterie et des transitoires électriques sur le bus CAN, protection thermique, et plus encore.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-2299
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.035 kg
|
| Other | |
EAN |
8606015078526
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.