

Lipowsky Industrie Elektronik GmbH
Simulateur de bus CAN/LIN Lipowsky Baby-LIN-RM-III
Simulateur de bus CAN/LIN Lipowsky Baby-LIN-RM-III
SKU: BABY-LIN-RM-III
Impossible de charger la disponibilité du service de retrait

Key Features
Overview
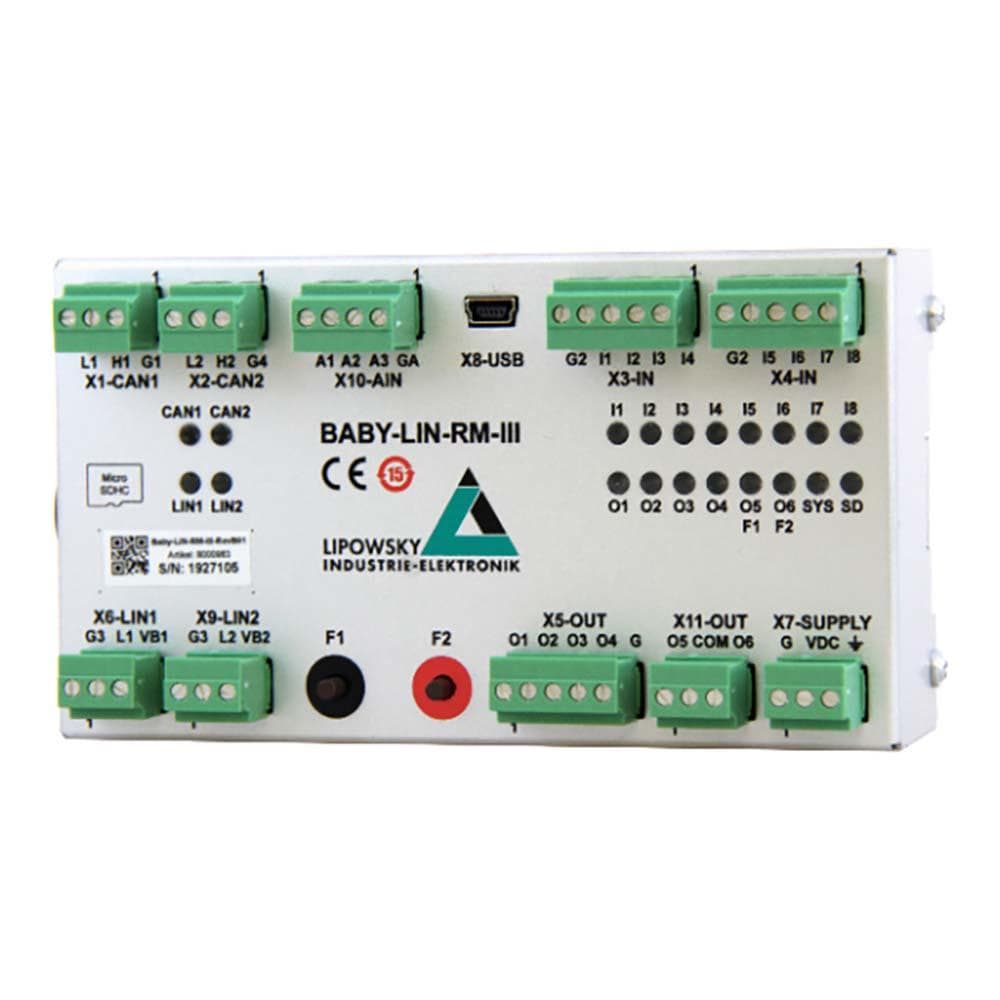
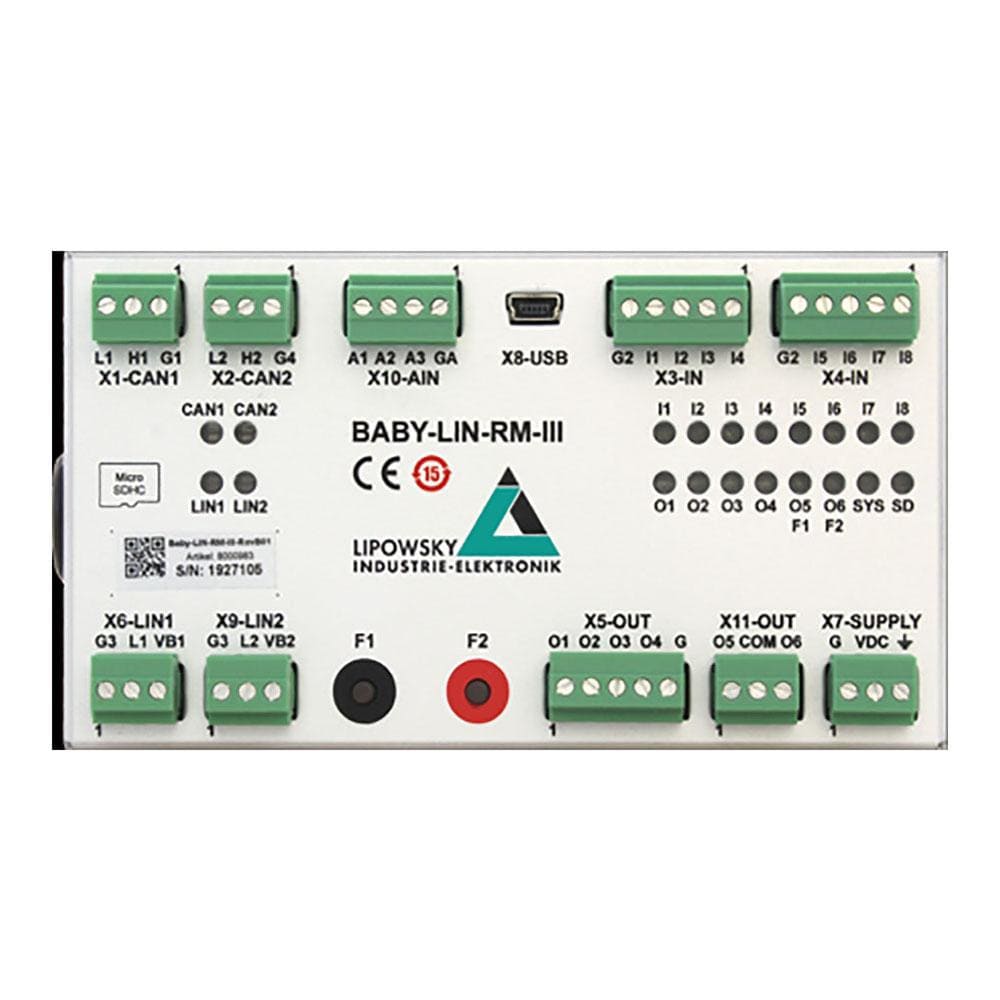
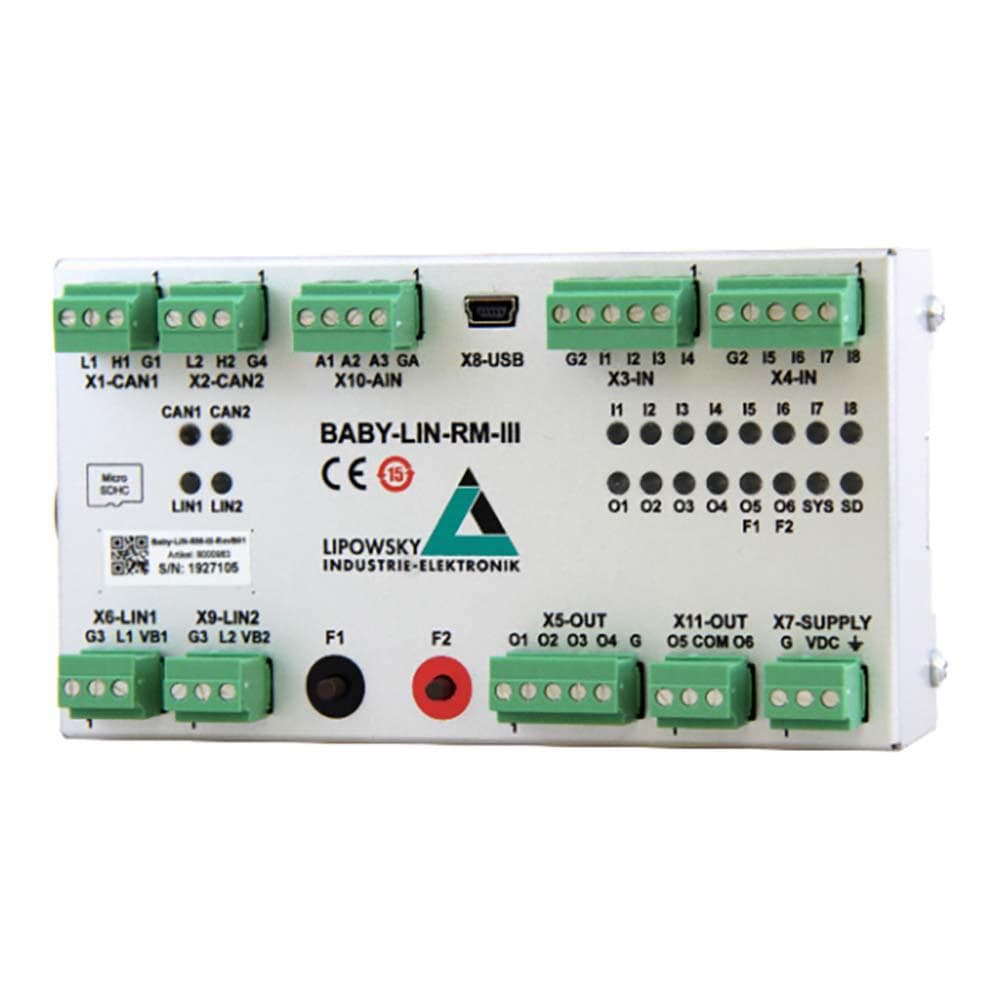
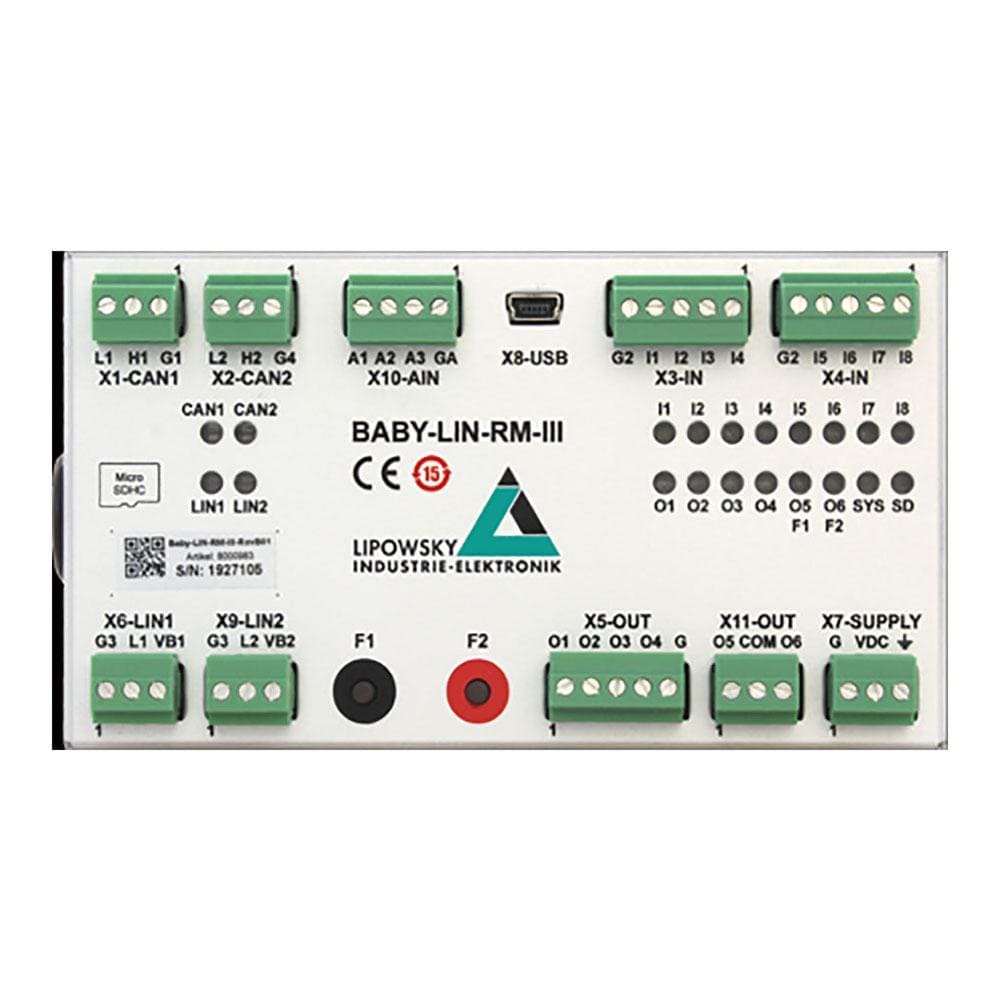
The Lipowsky Baby-LIN-RM-III allows LIN-Bus, CAN-Bus and CAN-FD Bus-equipped devices to be controlled by a PC.
The interface can simulate CAN and LIN-Bus Master and Slave nodes
After installation of the supplied LINWorks software, you can connect the Baby-LIN-RM-III to a free USB port and access the LIN- and CAN-Bus devices via LINWorks or your programs Baby-LIN-DLL. In addition, LIN and CAN devices can be controlled using digital signals only. This enhances testing facilities based on a PLC (Programmable Logic Controller) by a LIN- or CAN-Bus without much effort.
This can be highly beneficial to facilities with long-term testing.
Downloads
Le Lipowsky Baby-LIN-RM-III permet de contrôler les appareils équipés de bus LIN, CAN-Bus et CAN-FD par un PC.
L'interface peut simuler des nœuds maître et esclave CAN et LIN-Bus
Après l'installation du logiciel LINWorks fourni, vous pouvez connecter le Baby-LIN-RM-III à un port USB libre et accéder aux périphériques LIN et CAN-Bus via LINWorks ou vos programmes Baby-LIN-DLL. De plus, les périphériques LIN et CAN peuvent être contrôlés uniquement à l'aide de signaux numériques. Cela améliore les possibilités de test basées sur un PLC (Programmable Logic Controller) par un LIN ou un CAN-Bus sans trop d'efforts.
Cela peut être très bénéfique pour les installations effectuant des tests à long terme.
| General Information | |
|---|---|
Part Number (SKU) |
BABY-LIN-RM-III
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.5 kg
|
| Other | |
EAN |
5055383688678
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.