



Mikroelektronika d.o.o.
Vibro Motor 4 Click Board™
Vibro Motor 4 Click Board™
SKU: MIKROE-4825
Couldn't load pickup availability



Overview
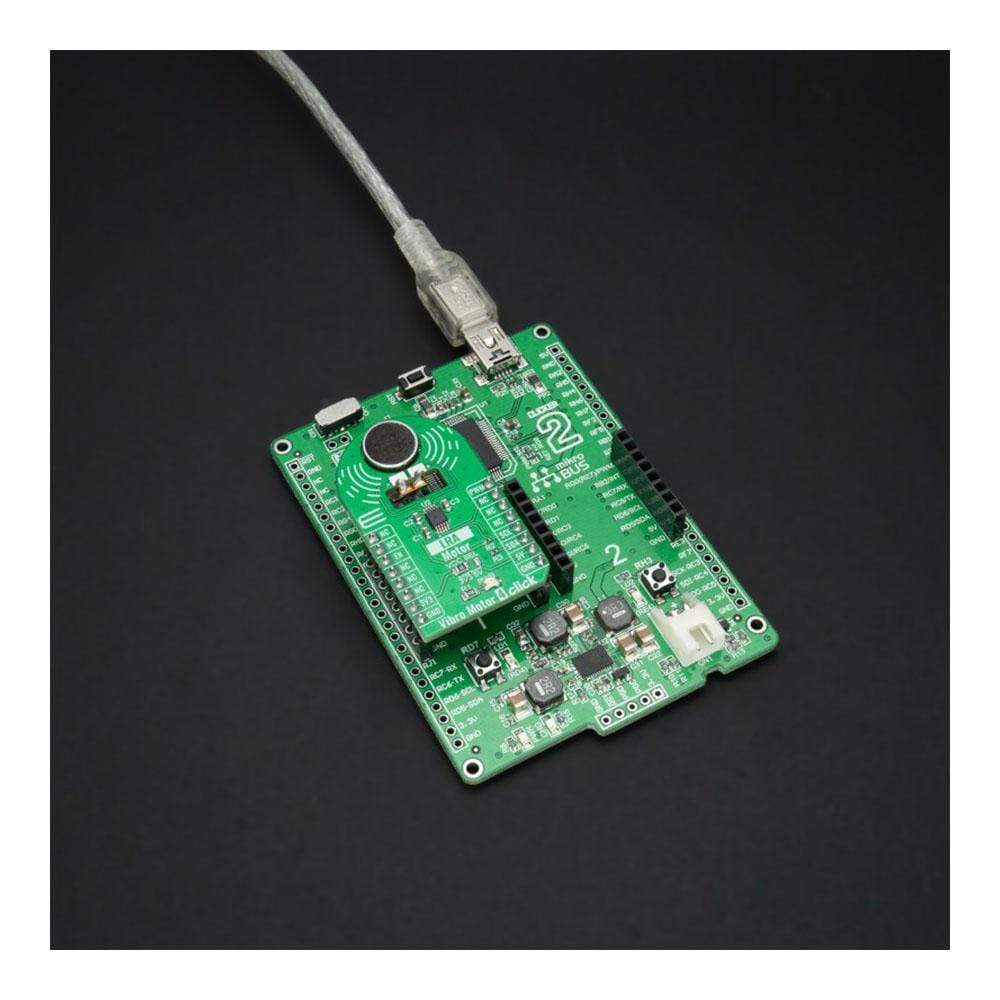
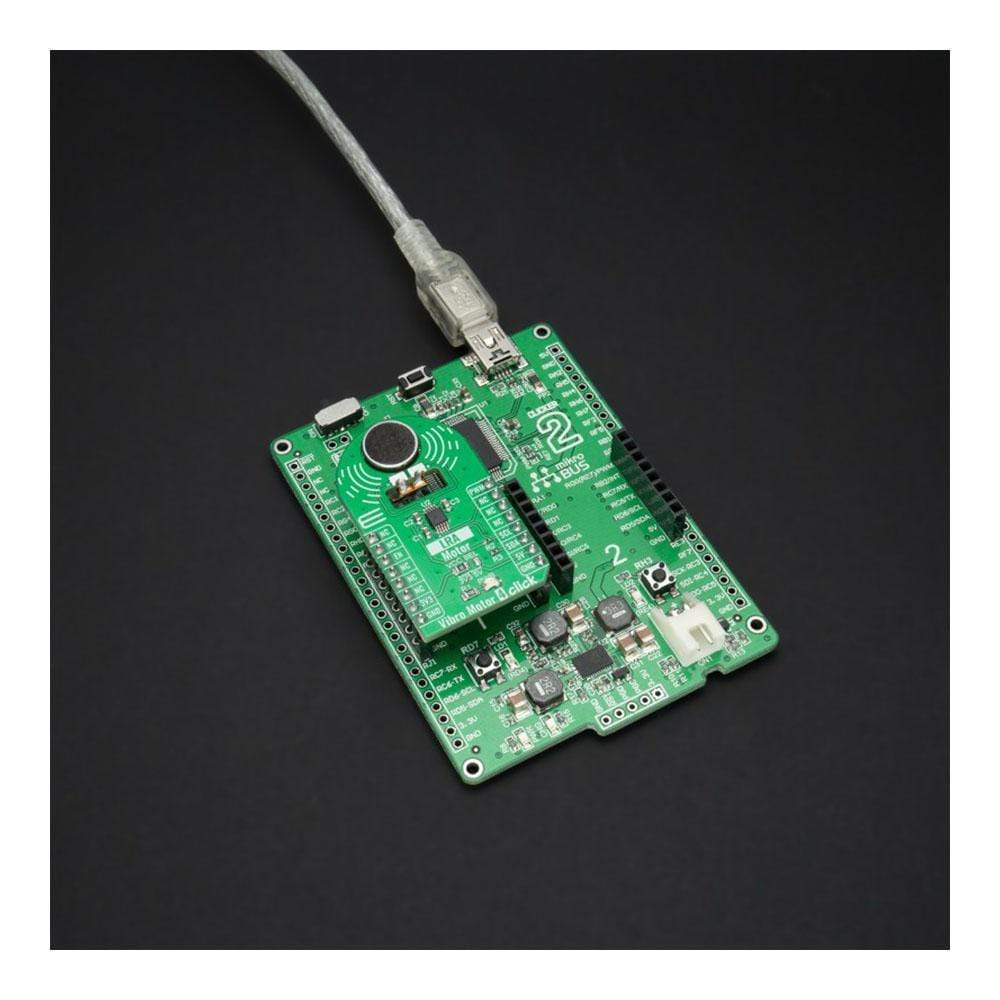
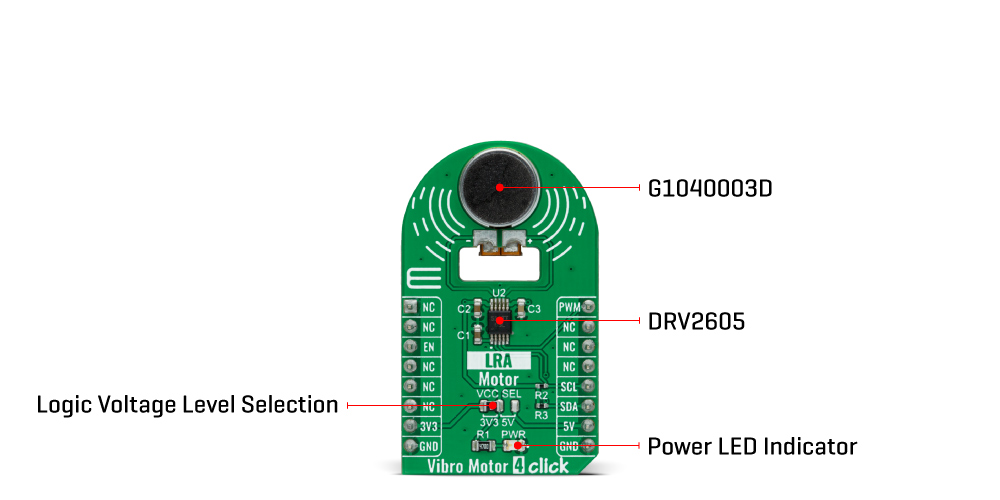
The Vibro Motor 4 Click Board™ is a compact add-on board that makes an ideal solution for adding simple haptic feedback in any design. This board features the G1040003D, a coin-sized linear resonant actuator (LRA) that generates vibration/haptic feedback from Jinlong Machinery & Electronics, Inc. Driven by a flexible Haptic/Vibra driver, the DRV2605, G1040003D vibrates in the Z-axis, which is perpendicular to the face of the vibration motor. It draws a maximum of 170mA while producing the highest G force/vibration energy of 2 GRMS.
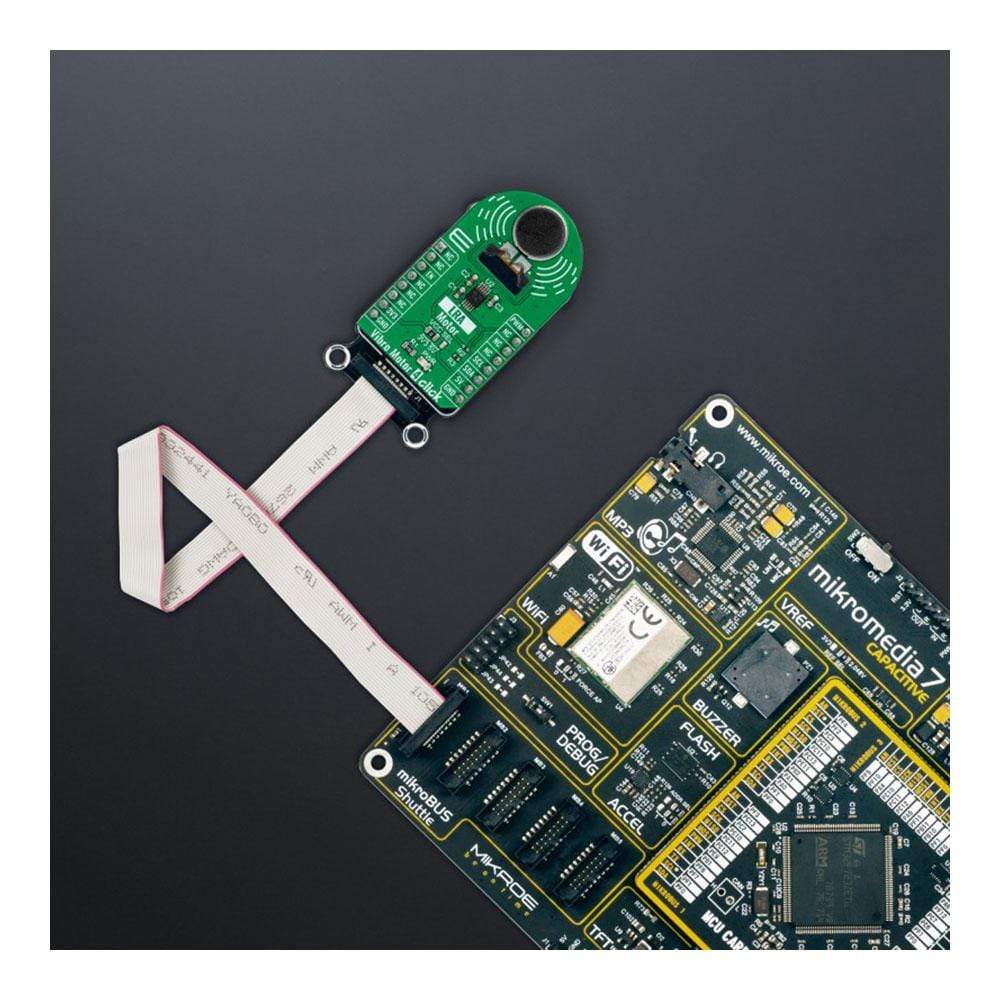
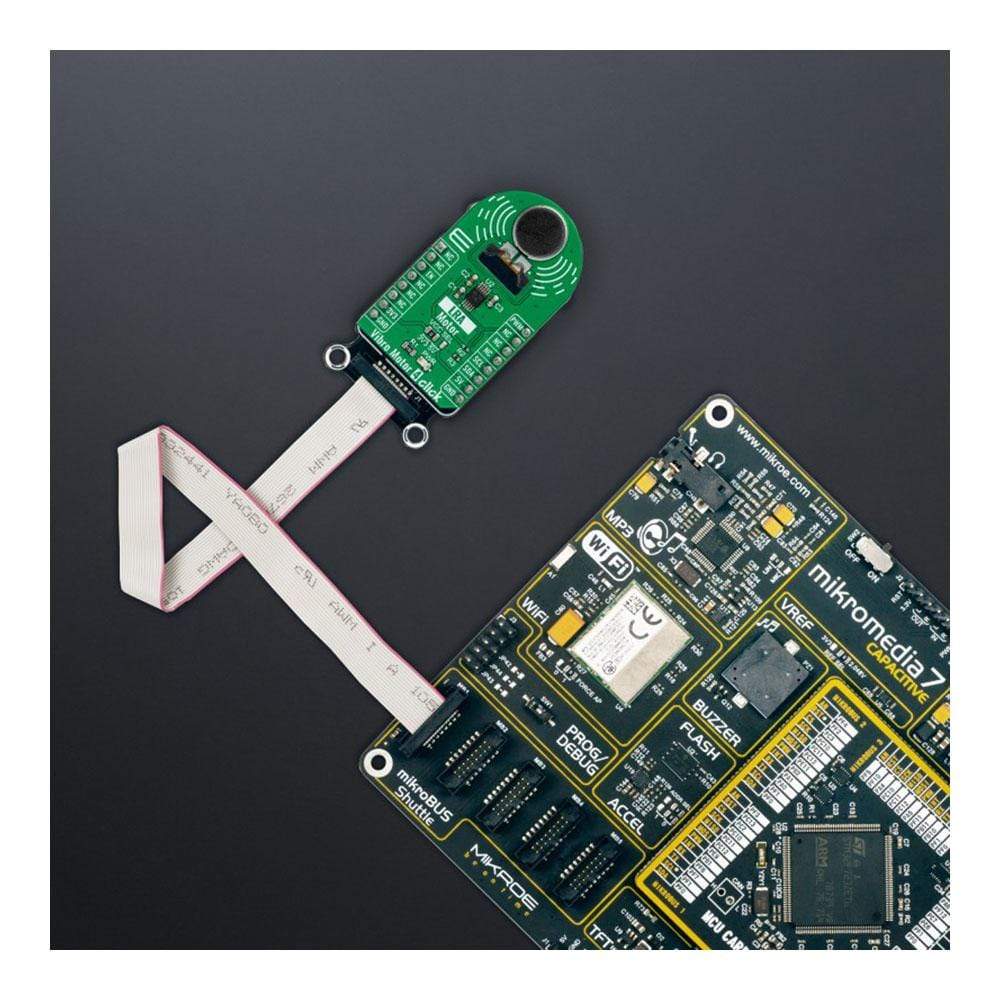
The Vibro Motor 4 Click Board™ makes an excellent choice for devices with limited battery capacity and for users who require crisp haptic feedback and low power consumption.
Downloads
How Does The Vibro Motor 4 Click Board™ Work?
The Vibro Motor 4 Click Board™ as its foundation uses the G1040003D, coin-sized linear resonant actuator that generates vibration/haptic feedback in the Z plane perpendicular to the motor's surface from Jinlong Machinery & Electronics, Inc. The G1040003D draws a typical 145mA while producing a G force of 2 GRMS and makes an excellent choice for applications requiring crisp haptic feedback and low power consumption. For haptic feedback applications, fast rise and fall times are critical for achieving the optimal user experience. That's why the rise time (50% power) of the G1040003D, which is 10ms, and its fall time (10% power) of 50ms makes it one of the best choices for haptic feedback applications.
The Vibro Motor 4 Click Board™ as its foundation uses the G1040003D, coin-sized linear resonant actuator that generates vibration/haptic feedback in the Z plane perpendicular to the motor's surface from Jinlong Machinery & Electronics, Inc. The G1040003D draws a typical 145mA while producing a G force of 2 GRMS and makes an excellent choice for applications requiring crisp haptic feedback and low power consumption. For haptic feedback applications, fast rise and fall times are critical for achieving the optimal user experience. That's why the rise time (50% power) of the G1040003D, which is 10ms, and its fall time (10% power) of 50ms makes it one of the best choices for haptic feedback applications.
Additionally, the DRV2605 can also operate in the PWM Mode and accept the PWM signal from the PWM pin of the mikroBUS™ socket. In this mode, the DRV2605 device drives the actuator continuously until the user sets the DRV2605 to a Standby Mode or enters another interface mode. More information about the operating modes of the DRV2605 can be found in the attached datasheet.
The Vibro Motor 4 Click Board™ can operate with both 3.3V and 5V logic voltage levels selected via the VCC SEL jumper. This way, it is allowed for both 3.3V and 5V capable MCUs to use the I2C communication lines properly. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.
Specifications
| Type | Haptic |
| Applications | Can be used for devices with limited battery capacity and for users who require crisp haptic feedback and low power consumption |
| On-board modules | G1040003D - coin-sized linear resonant actuator that generates vibration/haptic feedback in the Z plane perpendicular to the motor's surface from Jinlong Machinery & Electronics, Inc |
| Key Features | Low power consumption, vibration force in Z-axis, high reliability, excellent choice for devices with limited battery capacity, and more |
| Interface | I2C,PWM |
| Compatibility | mikroBUS |
| Click board size | M (42.9 x 25.4 mm) |
| Input Voltage | 3.3V or 5V |
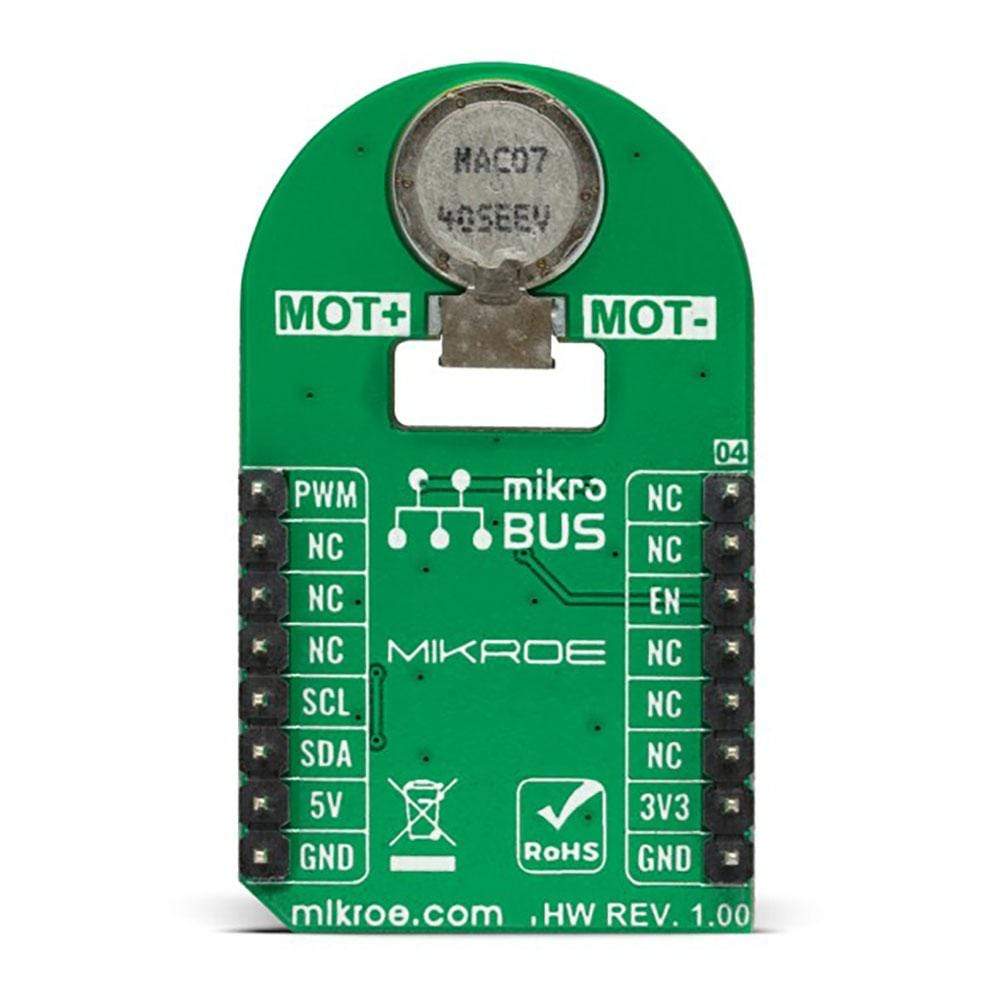
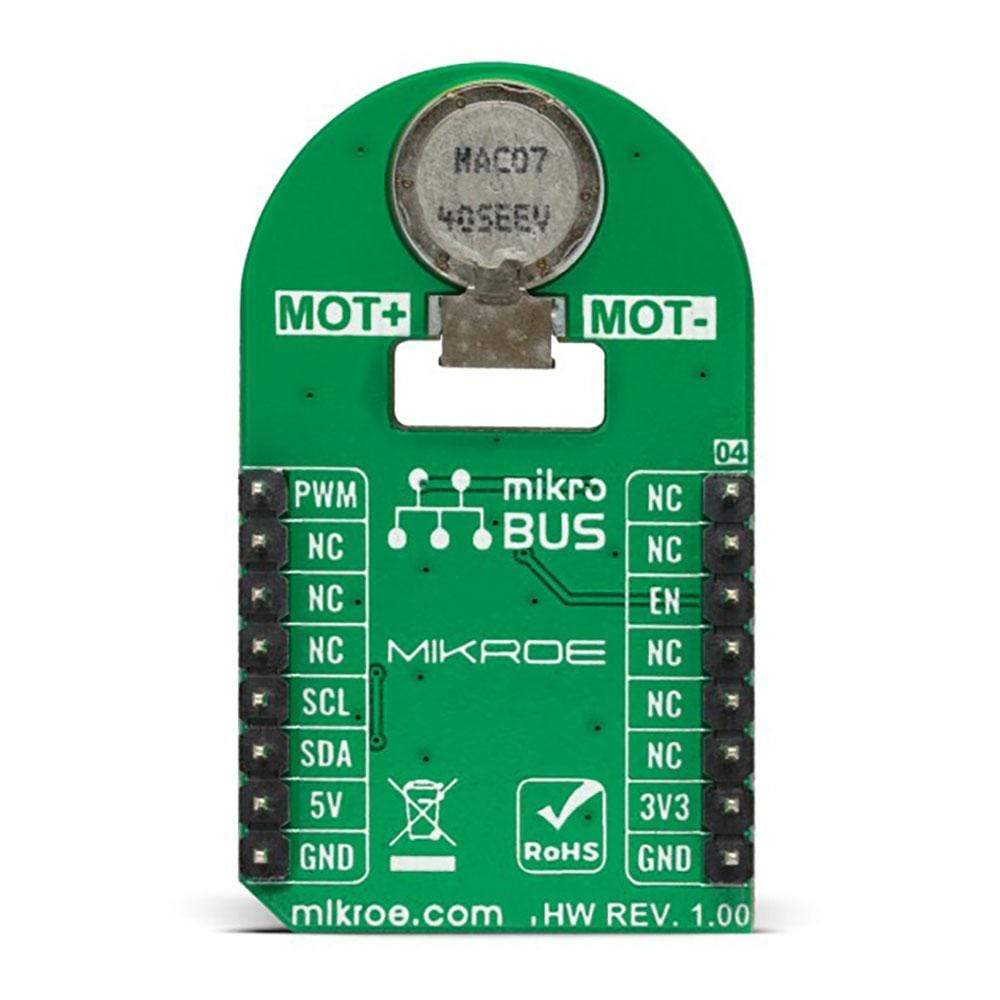
Pinout diagram
This table shows how the pinout on the Vibro Motor 4 Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | PWM | PWM Signal | |
| NC | 2 | RST | INT | 15 | NC | ||
| Enable | EN | 3 | CS | RX | 14 | NC | |
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
Onboard settings and indicators
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| JP1 | VCC SEL | Left | Logic Level Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
Vibro Motor 4 Click electrical specifications
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | 3.3 | - | 5 | V |
| Maximum Output Current | - | 145 | 170 | mA |
| Vibration G Force | - | - | 2 | GRMS |
| Operating Temperature Range | -25 | +25 | +70 | °C |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4825
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027383823
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.