







Mikroelektronika d.o.o.
Stepper 15 Click Board™
Stepper 15 Click Board™
SKU: MIKROE-4639
Couldn't load pickup availability




Overview
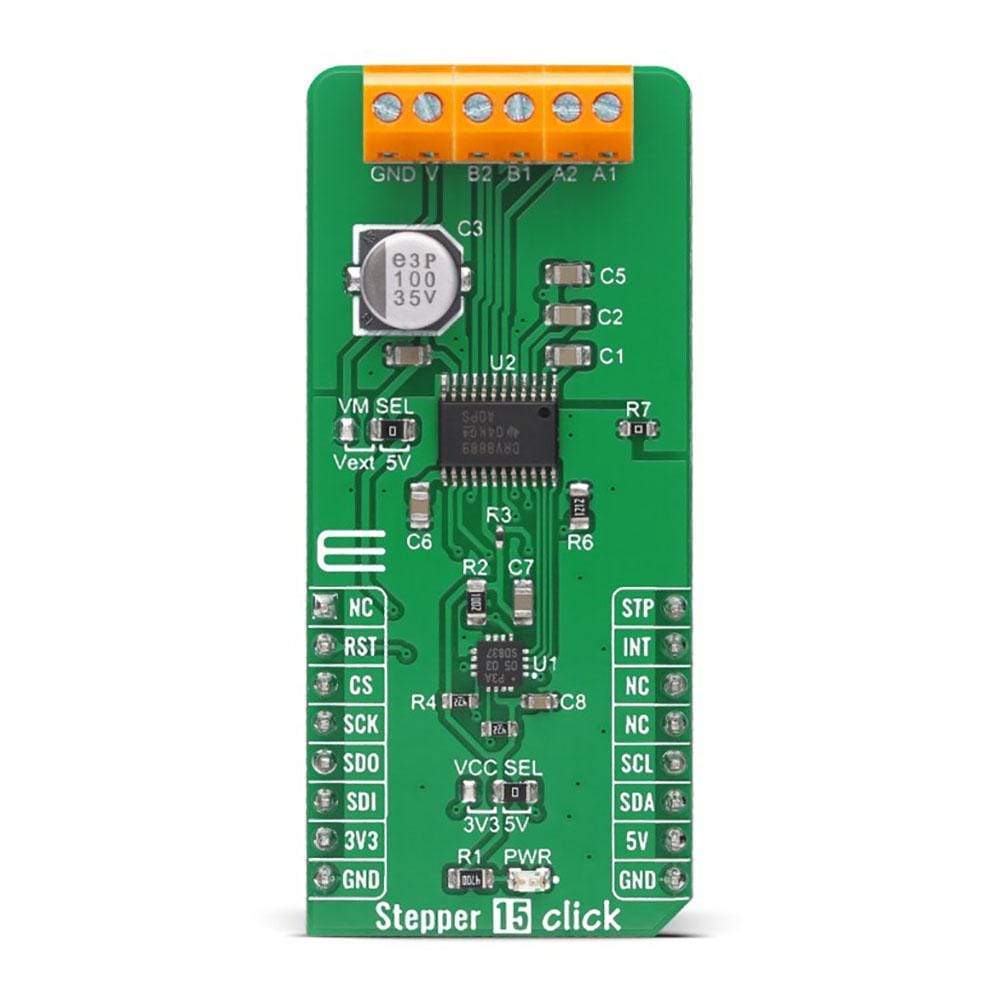
The Stepper 15 Click Board™ is a compact add-on board that contains a bipolar stepper motor driver. This board features the DRV8889A, an automotive stepper driver with integrated current sense and stall detection from Texas Instruments. It supports up to 1.5A full-scale current with an internal microstepping indexer, smart tune decay technology, advanced stall detection algorithm, and integrated current sensing, eliminating the need for power sense resistors. With a simple STEP/DIR interface, the device supports up to 1/256 levels of microstepping to enable a smooth motion profile. Also, an advanced stall detection algorithm allows users to detect if the motor stopped and take action as needed, improving efficiency and reducing noise. This Click Board™ is suitable for driving motors in any application that demands a precise and safe step motor driver.
The Stepper 15 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
How Does The Stepper 15 Click Board™ Work?
The Stepper 15 Click Board™ uses the DRV8889A, an integrated motor-driver solution for bipolar stepper motors from Texas Instruments. The DRV8889A integrates two N-channel power MOSFET H-bridges (disabled by default after Power-Up), integrated current sense and regulation circuitry, and a microstepping indexer. It can be powered with a supply voltage from 4.5 to 45V, providing an output current up to 2.4A peak, 1.5A full-scale, or 1.1A RMS.

![]()
The DRV8889A uses an integrated current-sense architecture which eliminates the need for two external power sense resistors. This architecture removes the power dissipated in the sense resistors using a current mirror approach and using the internal power MOSFETs for current sensing. It also includes an integrated torque DAC that allows the controller to scale the output current through a full-duplex, 4-wire synchronous SPI interface without needing to scale the voltage reference. The torque DAC allows the controller to save system power by decreasing the motor current consumption when high output torque is not required.
A simple STEP/DIR interface allows an external MCU to manage the direction and step rate of the stepper motor. The internal indexer can execute high-accuracy microstepping without requiring the MCU to handle the winding current level. The indexer can take the whole step, half step, and 1/4, 1/8, 1/16, 1/32, 1/64, 1/128, and 1/256 microstepping. Also, a noncircular half stepping mode is available for increased torque output at higher motor RPM in addition to a standard half stepping mode.
Unlike the STEP pin controlled by the PWM pin from the mikroBUS™ socket, other pins from the DRV8889A such as Sleep mode selection, fault indicator, direction selection, and device disable pin are controlled through a well-known 8bit I/O expander, the PCA9538 from NXP Semiconductor using the standard I2C 2-Wire interface with a maximum frequency of 400kHz. The PCA9538 also uses RST and INT pins from the mikroBUS™ socket as a hardware reset and interrupt function.
The Stepper 15 Click Board™ can operate with both 3.3V and 5V logic voltage levels selected via the VCC SEL jumper. It allows for both 3.3V and 5V capable MCUs to use the communication lines properly. Additionally, there is a possibility for stepper motor driver power supply selection via jumper labelled as VM SEL to supply the DRV8889A from an external input terminal in the range from 4.5 to 45V or with a 5V from mikroBUS™ power rail.
SPECIFICATIONS
| Type | Stepper |
| Applications | Can be used for driving motors in any application that demands a precise and safe step motor driver. |
| On-board modules | DRV8889A - integrated motor-driver solution for bipolar stepper motors from Texas Instruments |
| Key Features | Qualified for automotive, up to 1/256 microstepping, integrated current sense, various protection features, and more. |
| Interface | SPI,I2C |
| Compatibility | mikroBUS |
| Click board size | L (57.15 x 25.4 mm) |
| Input Voltage | 3.3V or 5V,External |
PINOUT DIAGRAM
This table shows how the pinout of the Stepper 15 Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin |
|
Pin | Notes | |||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | STP | Step-Rate | |
| Reset | RST | 2 | RST | INT | 15 | INT | Interrupt |
| SPI Chip Select | CS | 3 | CS | RX | 14 | NC | |
| SPI Clock | SCK | 4 | SCK | TX | 13 | NC | |
| SPI Data OUT | SDO | 5 | MISO | SCL | 12 | SCL | I2C Clock |
| SPI Data IN | SDI | 6 | MOSI | SDA | 11 | SDA | I2C Data |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| JP1 | VM SEL | Right | DRV8889A Power Supply Selection Vext/5V: Left position Vext, Right position 5V |
| JP2 | VCC SEL | Right | Logic Level Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
STEPPER 15 CLICK ELECTRICAL SPECIFICATIONS
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage VCC | 3.3 | - | 5 | V |
| Supply Voltage Vext | 4.5 | - | 45 | V |
| Maximum Output Current | - | - | 1.5 | A |
| Step Resolution | 1/256 | - | 1 | μstep |
| Operating Temperature Range | -40 | +25 | +125 | °C |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4639
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027382543
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.