




Mikroelektronika d.o.o.
Brushless 12 Click Board™
Brushless 12 Click Board™
SKU: MIKROE-4357
Couldn't load pickup availability




Overview
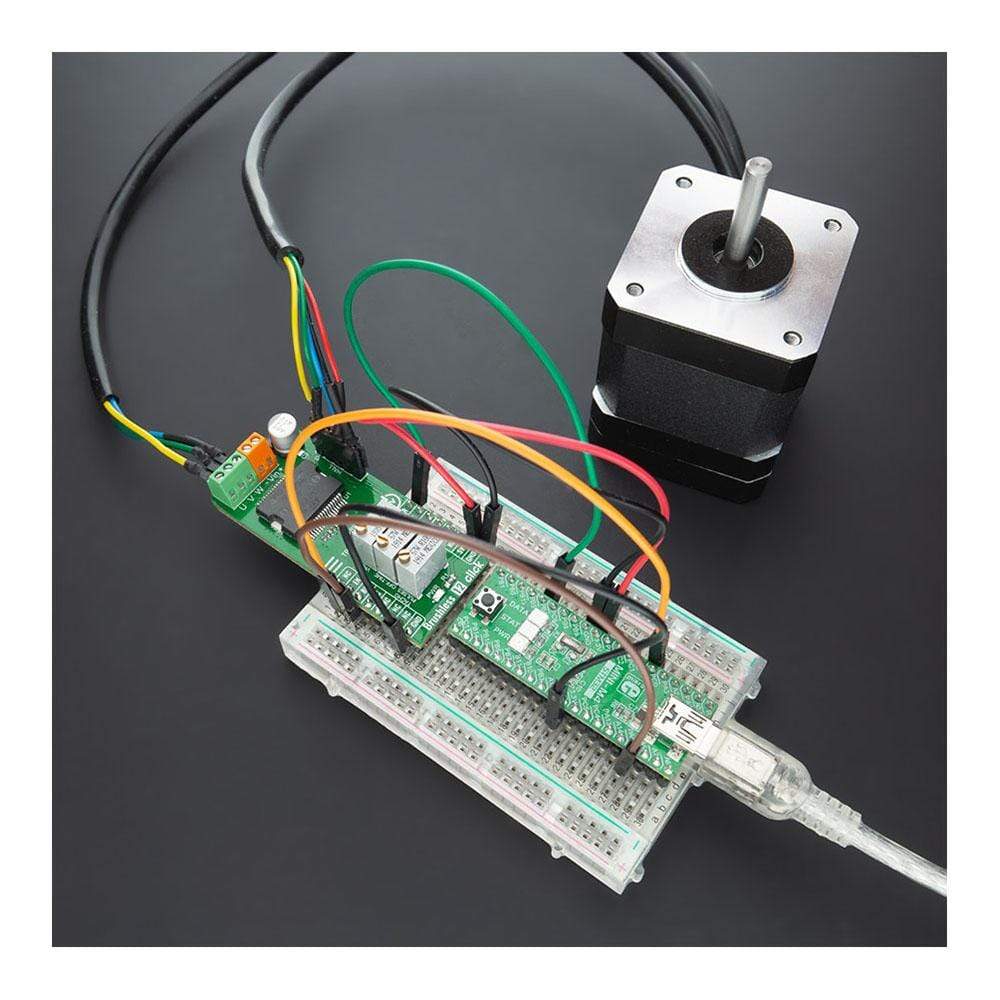
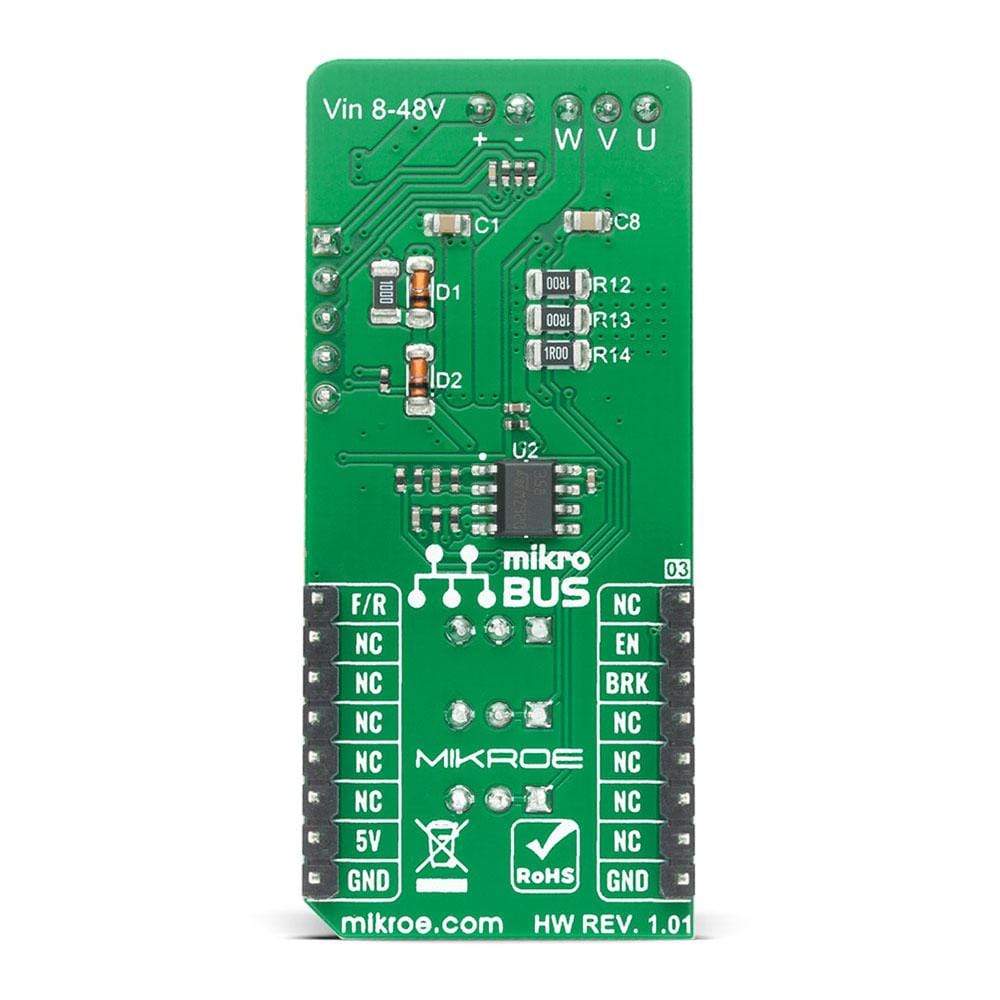
The Brushless 12 Click Board™ is a compact add-on board that controls BLDC motors with any MCU. This board features the L6235, DMOS fully integrated 3-phase motor driver with overcurrent protection from STMicroelectronics. The L6235 combines the chip's isolated DMOS power transistors with CMOS and bipolar circuits. It features a non-dissipative overcurrent protection on the high-side power MOSFETs and thermal shutdown and includes all the circuitry needed to drive a 3-phase brushless DC motor. This Click Board™ makes the perfect solution for small home appliances, robotics, battery-powered systems, small cooling fans, and many more.
The Brushless 12 Click is supported by a mikroSDK-compliant library, which includes functions that simplify software development. This Click Board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
How Does The The Brushless 12 Click Board™ Work?
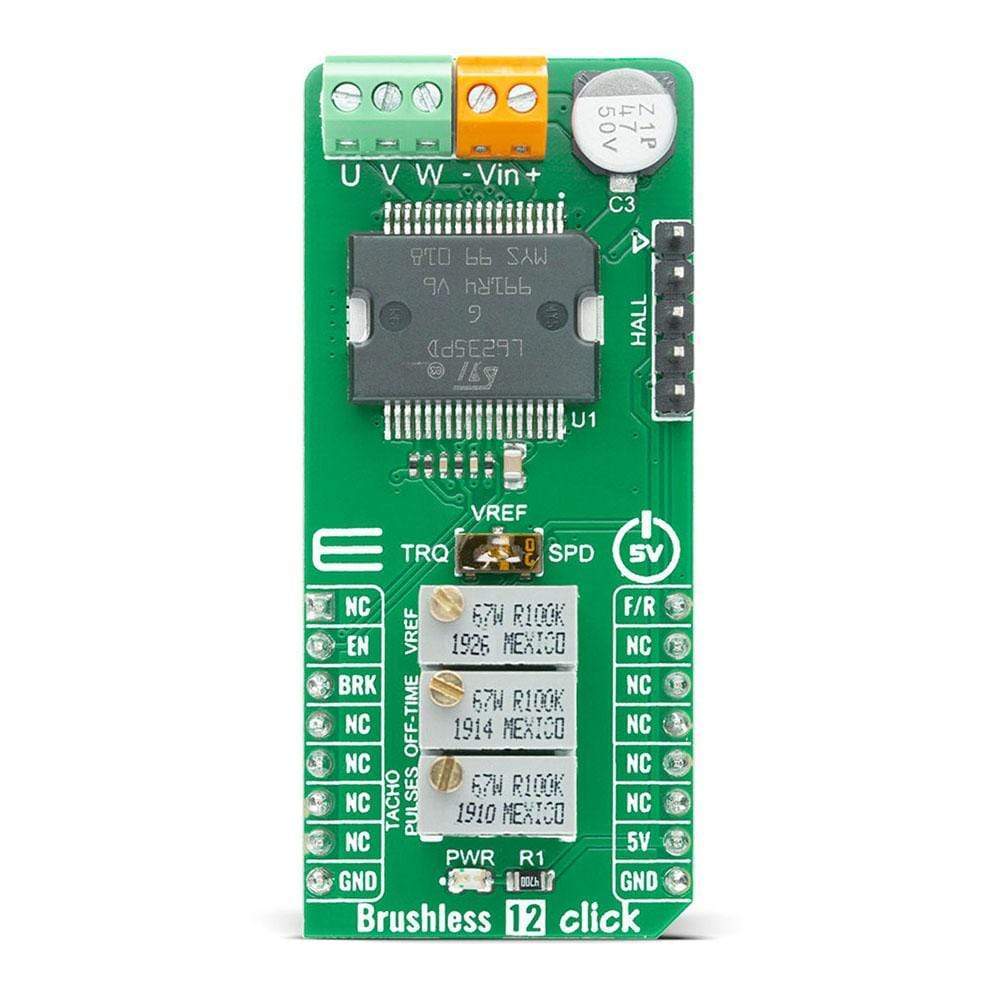
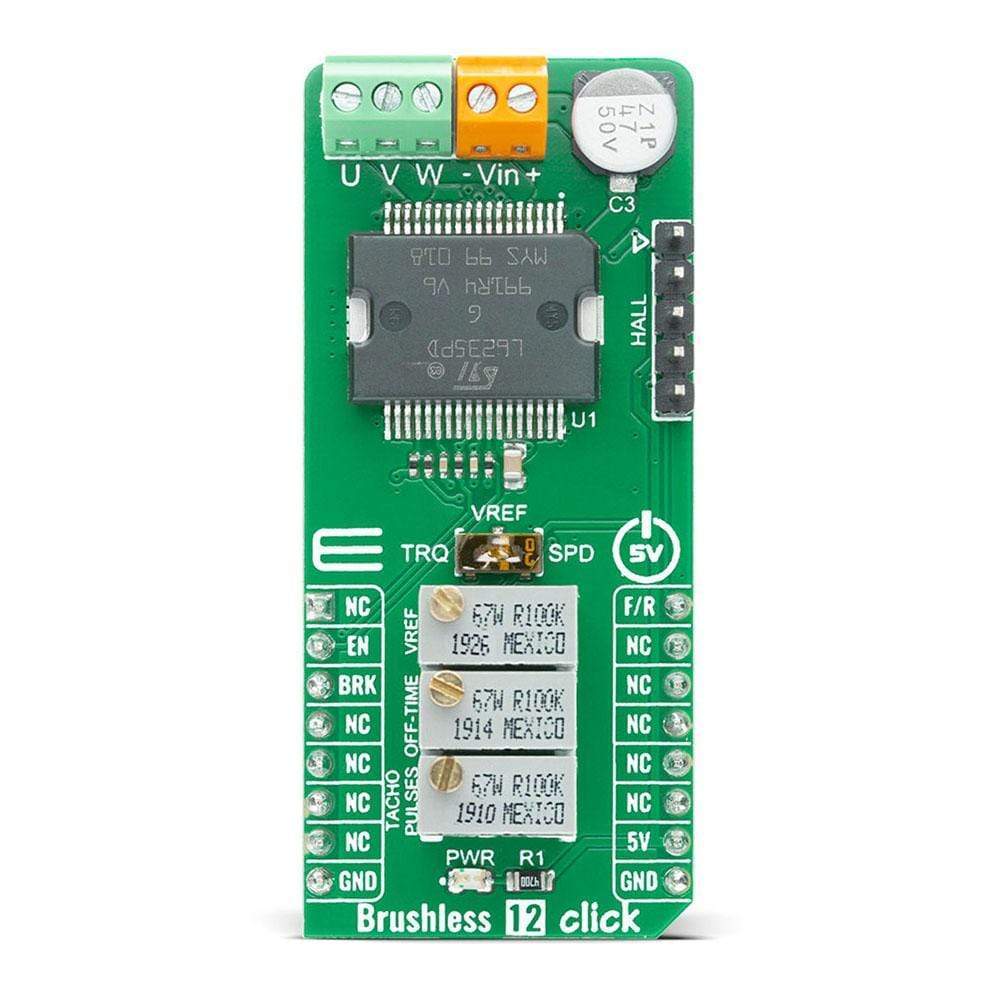
The Brushless 12 Click Board™ is based on the L6235, fully integrated motor driver specifically developed to drive a wide range of BLDC motors with Hall effect sensors from STMicroelectronics. The L6235 includes a 3-phase DMOS bridge, an OFF-TIME PWM current controller, and the decoding logic for single-ended Hall sensors that generate the required sequence for the power stage, and other added features for safe operation and flexibility. It also has a built-in Over Current Detection (OCD) that allows protection against short circuits between the outputs and between output and ground.
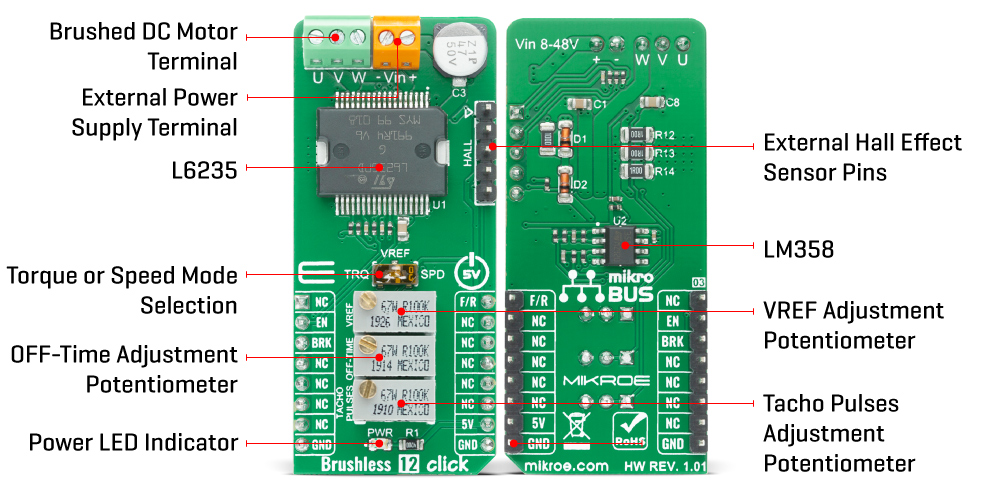
Integrated decoding logic of the L6235 provides the correct sequence on the three outputs labeled as U V W for motors with both 60° and 120° spaced Hall effect sensors signals. The sensor outputs are connected to the H1, H2, H3 inputs of the device through the header labeled as HALL. H1 input of the L6235 is internally connected to a monostable that provides a width pulse on the TACHO output. With a pull-up resistor on this output, the resulting waveform at the pin will be a square-wave whose frequency is proportional to the motor rotation speed, with an on-time set by the potentiometer VR1 labeled as TACHO. An additional potentiometer on the Brushless 12 Click Board™ VR2, labeled as OFF-TIME, can be used for a PWM current regulation capacity.
VR1 potentiometer defines the on-time integrated and compared to a voltage proportional to the desired speed by the Op-Amp LM358 also from STMicroelectronics. The output of the Op-Amp represents the speed error signal. Providing this signal to the VREF input of the L6235, which sets the current in the motor windings, the speed error will act on the motor modifying its torque to maintain the speed at a constant value. This feature of the L6235 can be selected by the switch labeled as VREF that allows the selection between Torque or Speed Mode.
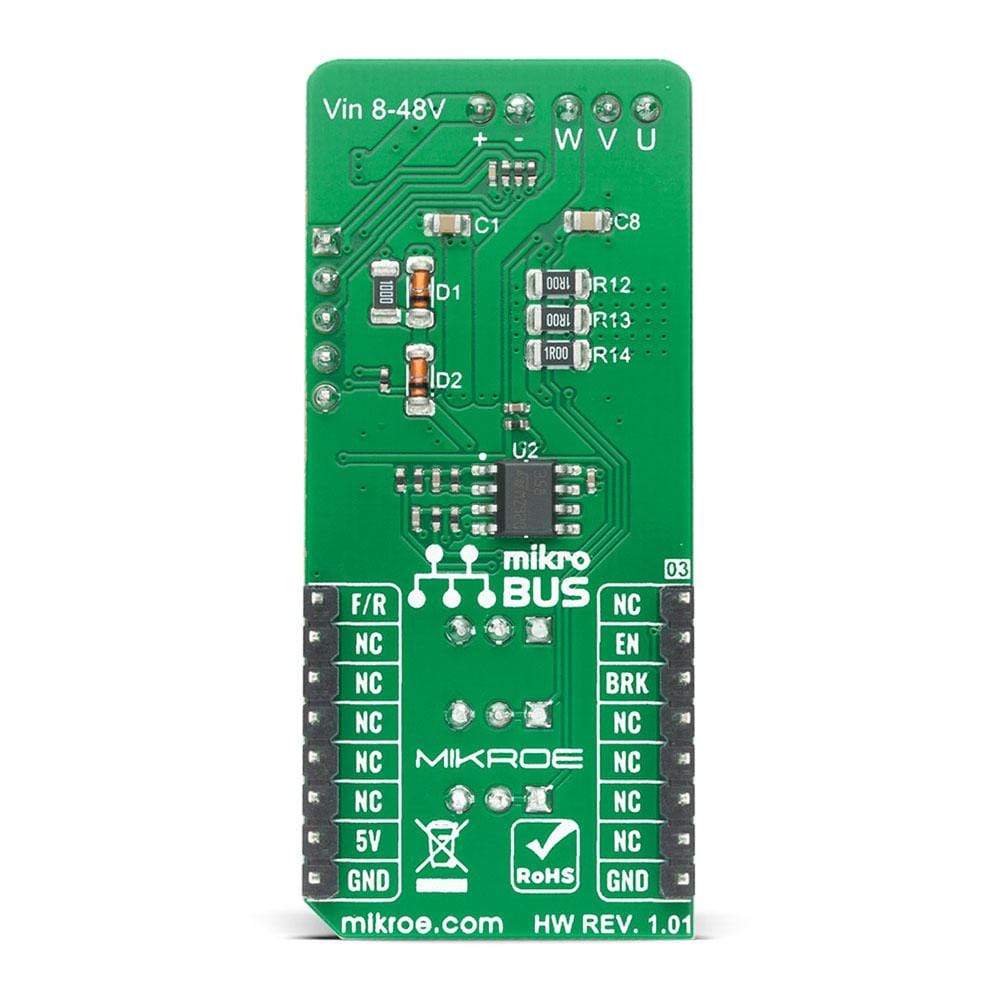
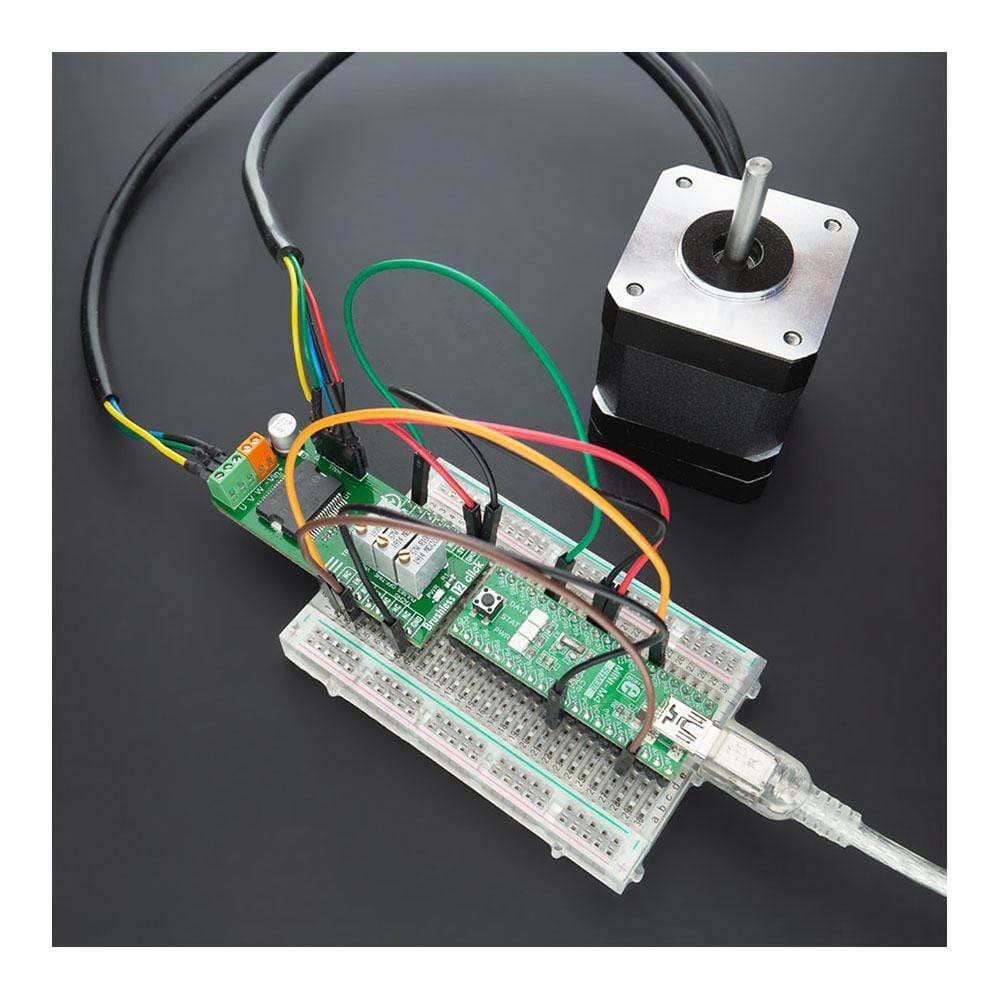
The Brushless 12 Click Board™ communicates with MCU using several GPIO pins. The RST pin of the mikroBUS™ socket labeled as EN represents the Enable function and serves as Chip Enable that turns OFF all power MOSFETs of the L6235. CS pin labeled as BRK switches ON all high-side power MOSFETs and allows the user to use the brake function. And the last GPIO pin routed to the PWM pin of the mikroBUS™ socket labeled as F/R selects the direction of the motor rotation. It also possesses two connectors, where one of them represents an external power supply labeled as VIN in the range from 8 to 48V maximum, and the next one labeled with U V W is a terminal on which the BLDC motor needs to be connected.
The Brushless 12 Click Board™ is designed to be operated only with a 5V logic voltage level. A proper logic voltage level conversion should be performed before the Click board™ is used with MCUs with different logic levels. However, the Click board™ comes equipped with a library that contains easy to use functions and an example code which can be used, as a reference, for further development.
SPECIFICATIONS
| Type | Brushless |
| Applications | Can be used for small home appliances, robotics, battery-powered systems, small cooling fans, and many more. |
| On-board modules | The Brushless 12 Click Board™ is based on the L6235, fully integrated motor driver specifically developed to drive a wide range of BLDC motors with Hall effect sensors from STMicroelectronics. |
| Key Features | Overcurrent detection and protection, undervoltage lockout, PWM current controller, brake function, tachometer output for speed loop, thermal shutdown, and more. |
| Interface | PWM,GPIO |
| Compatibility | mikroBUS |
| Click board size | L (57.15 x 25.4 mm) |
| Input Voltage | 5V,External |
PINOUT DIAGRAM
This table shows how the pinout on Brushless 12 Click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | F/R | Forward/Reverse | |
| Enable | EN | 2 | RST | INT | 15 | NC | |
| Brake | BRK | 3 | CS | RX | 14 | NC | |
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | NC | ||
| NC | 6 | MOSI | SDA | 11 | NC | ||
| NC | 7 | 3.3V | 5V | 10 | 5V | Power Supply | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| J1 | HALL | Populated | External Hall Effect Sensor Pins |
| SW1 | VREF | Right | Torque or Speed Mode Selection |
| TR1 | VR1 | - | Tacho Pulses Adjustment Potentiometer |
| TR2 | VR2 | - | OFF-Time Adjustment Potentiometer |
| TR3 | VR3 | - | VREF Adjustment Potentiometer |
BRUSHLESS 12 CLICK ELECTRICAL SPECIFICATIONS
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage VIN | 7 | - | 52 | V |
| Maximum Output Current | - | - | 2.8 | A |
| Switching frequency | - | - | 100 | kHz |
| Operating Temperature Range | -40 | - | +150 | °C |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4357
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.027 kg
|
| Other | |
EAN |
8606027381225
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.