


Mikroelektronika d.o.o.
Buck 14 Click Board™
Buck 14 Click Board™
SKU: MIKROE-3847
Couldn't load pickup availability


Overview
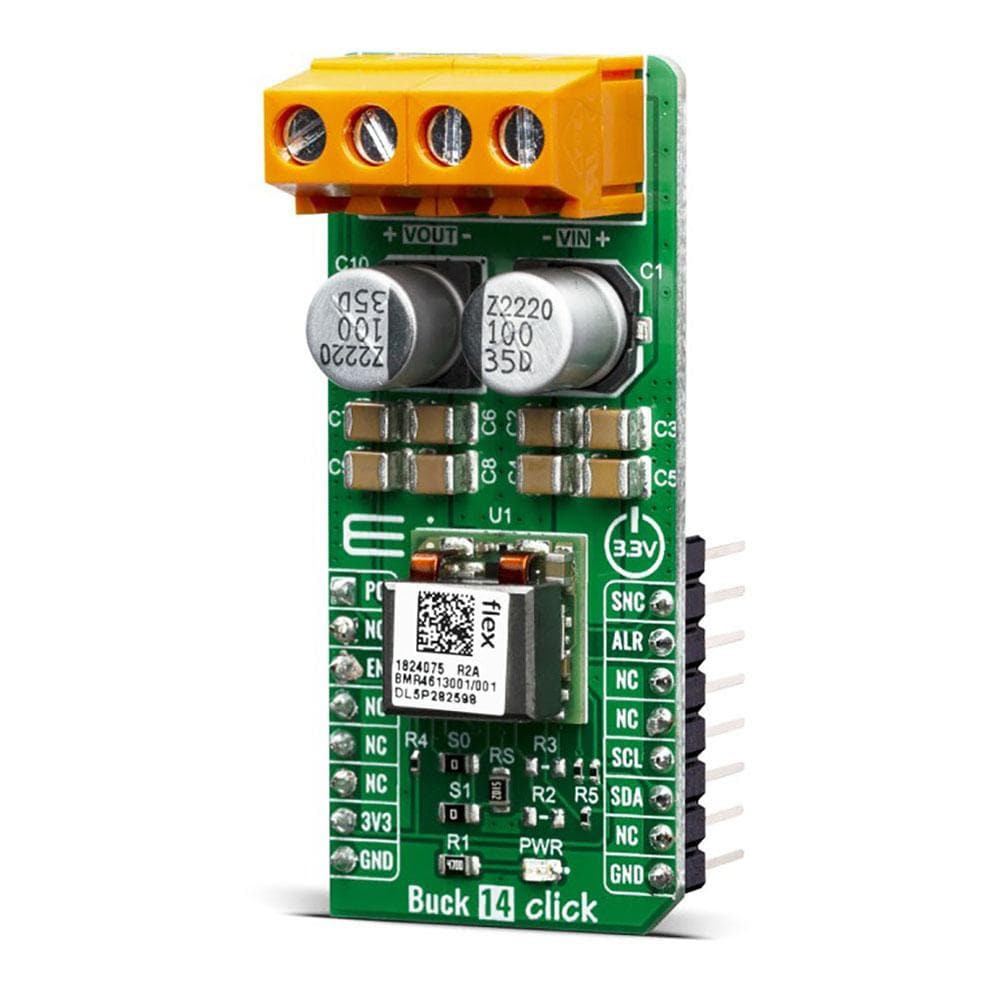
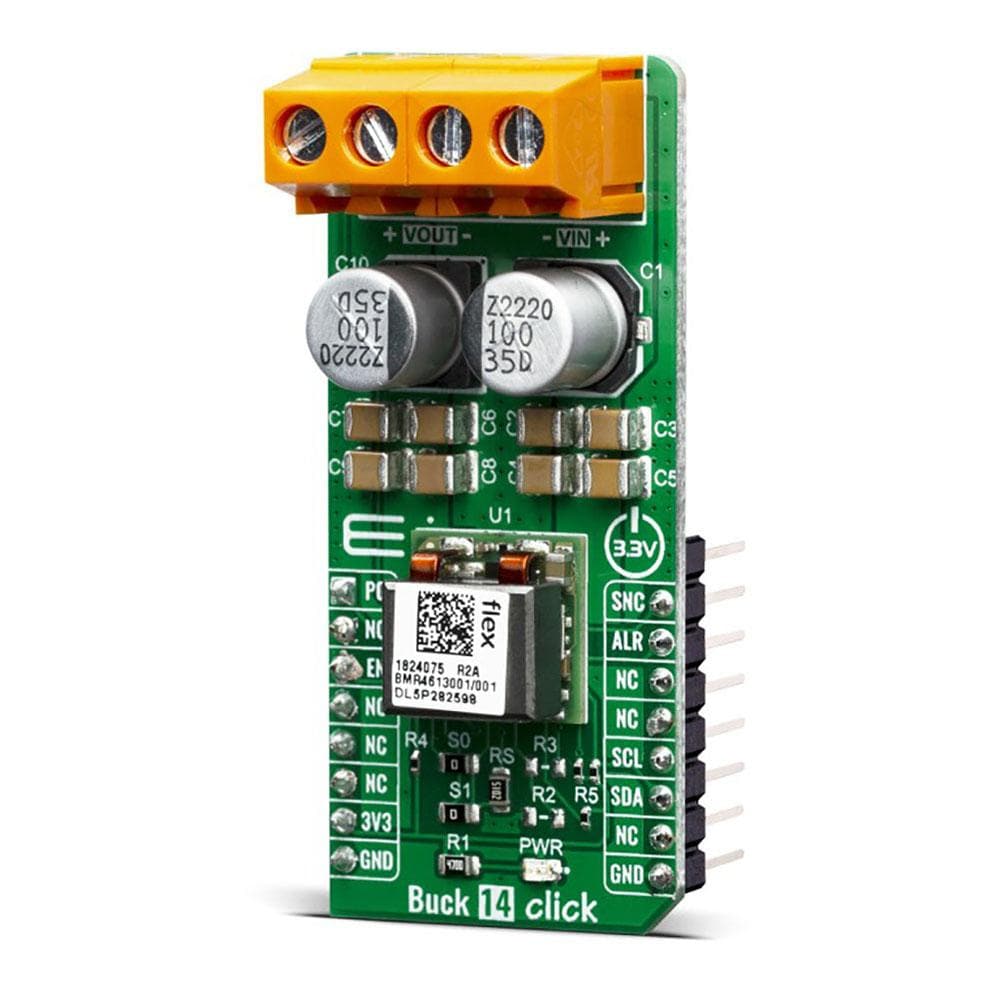
The Buck 14 Click Board™ is based around the BMR4613001/001, a PoL regulator from Flex. It's a high-efficiency step-down converter that provides a highly regulated output voltage derived from the connected power source, rated from 4.5 to 14V. The regulated output voltage can be selected between 0.6V and 5V.
The Buck 14 Click Board™, due to the high efficiency of BMR4613001/001 allows the Click Board™ to easily deliver up to 12A of current with a maximum of 60W of power and high efficiency, typically 96 % at 12Vin, 5Vout and 80% load.
Downloads
How Does The Buck 14 Click Board™ Work?
The Buck 14 Click Board™, based around the BMR4613001/001 - a PoL regulator from Flex, incorporates a wide range of readable and configurable power management features that are simple to implement with a minimum of external components. Additionally, it includes protection features that continuously safeguard the load from damage due to unexpected system faults. A fault is also shown as an alert on the ALR pin of mikroBUS socket. The product is delivered with a default configuration suitable for a wide range of operation in terms of input voltage, output voltage, and load. The configuration is stored in an internal Non-Volatile Memory (NVM). All power management functions can be reconfigured using the PMBus interface.
It is possible to monitor a wide variety of parameters through the PMBus interface. Fault conditions can be monitored using the SALERT pin, which will be asserted when any number of pre-configured fault or warning conditions occur. It is also possible to continuously monitor one or more of the power conversion parameters including but not limited to the following:
- Input voltage (READ_VIN)
- Output voltage (READ_VOUT)
- Output current (READ_IOUT)
- Internal junction temperature (READ_TEMPERATURE_1)
- Switching frequency (READ_FREQUENCY)
- Duty cycle (READ_DUTY_CYCLE)
The Buck 14 Click Board™ supports tracking of the output from a master voltage applied to the VTRK pin of BMR4613001/001. To select the tracking mode, a resistance ≤ 4.22 kΩ must be connected between the VSET and PREF pins (RS resistor). The tracking ratio used is controlled by an internal feedback divider RDIV and an external resistive voltage divider (R3, R2, not populated on Click Board™) which is placed from the supply being tracked to GND pins.
Unlike PID-based digital power regulators the product uses a state-space model based algorithm that is valid for both the small- and large-signal response and accounts for duty-cycle saturation effects. This eliminates the need for users to determine and set thresholds for transitioning from linear to nonlinear modes. These capabilities result in fast loop transient response and the possibility of reducing the number of output capacitors.
To control the output voltage the product features both a remote control input through the EN pin and a PMBus enable function by the command OPERATION. It is also possible to configure the output to be always on. By default the output is controlled by the EN pin only. The output voltage control can be reconfigured using the PMBus command ON_OFF_CONFIG.
It is designed to operate in different thermal environments and sufficient cooling must be provided to ensure reliable operation. Cooling is achieved mainly by conduction, from the pins to the host board, and convection, which is dependent on the airflow across the product. Increased airflow enhances the cooling of the product.
SPECIFICATIONS
| Type | Buck |
| Applications | A perfect choice for step-down applications for embedded electronic devices, servers, routers, data storage devices, low-power ICs, etc |
| On-board modules | BMR4613001/001, a PoL regulator from Flex |
| Key Features | Voltage Tracking & Voltage margining, remote control and power good, High efficiency |
| Interface | GPIO,I2C |
| Compatibility | mikroBUS |
| Click Board™ size | L (57.15 x 25.4 mm) |
| Input Voltage | 3.3V |
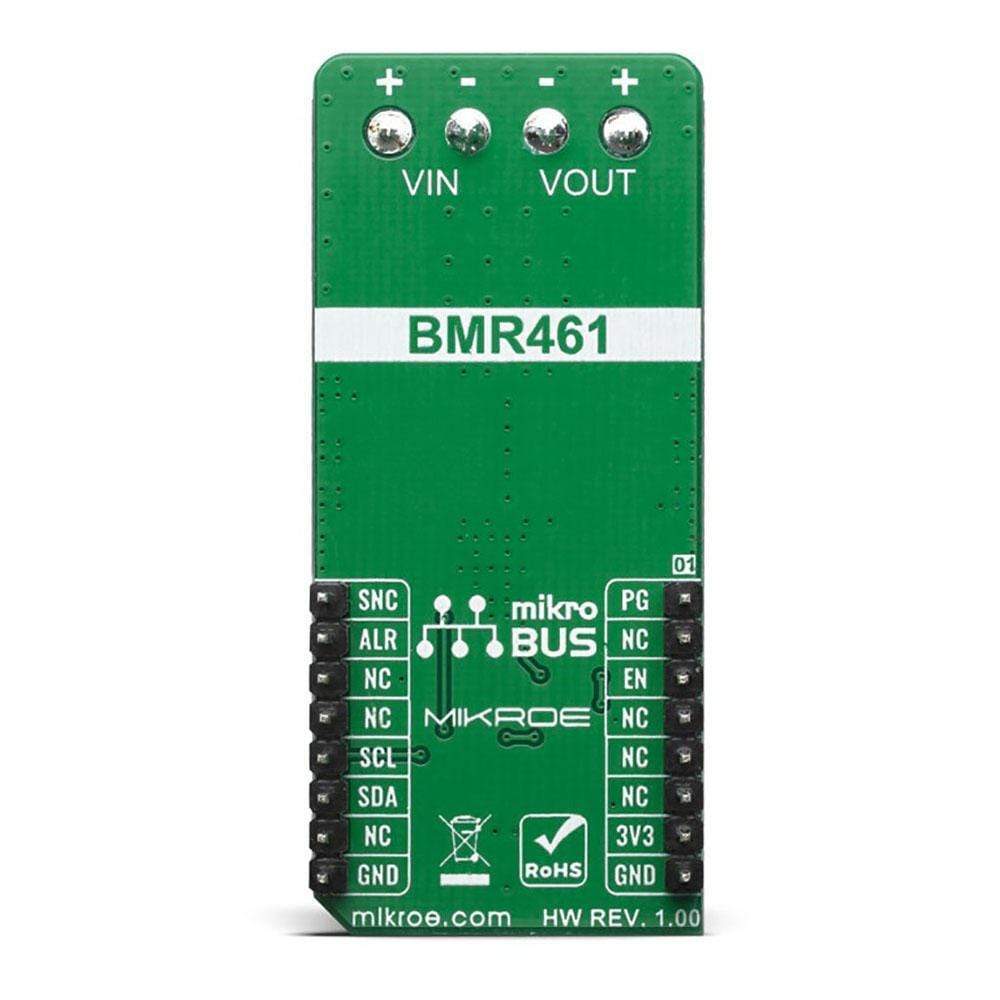
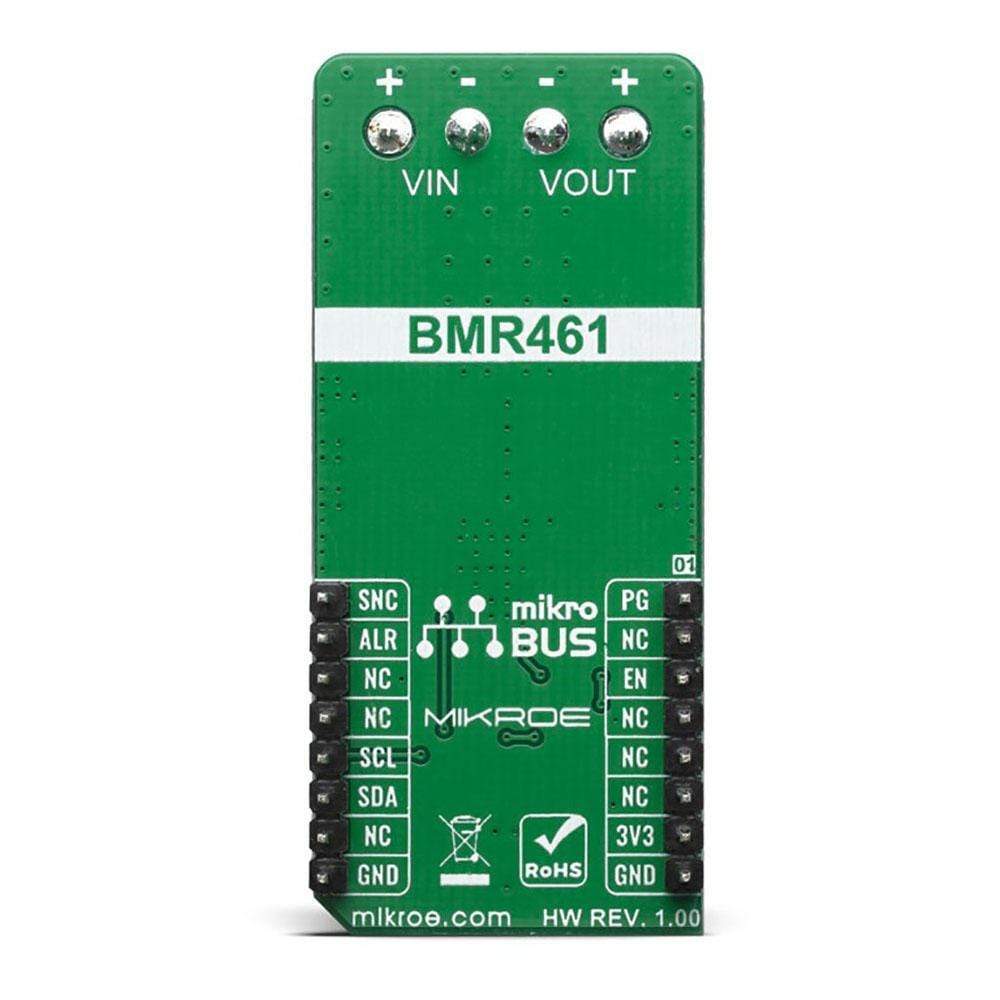
PINOUT DIAGRAM
This table shows how the pinout of the Buck 14 Click Board™ corresponds to the pinout on the mikroBUS socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| Power Good | PG | 1 | AN | PWM | 16 | SYN | Sync |
| NC | 2 | RST | INT | 15 | ALR | Alert | |
| Enable | EN | 3 | CS | RX | 14 | NC | |
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | NC | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
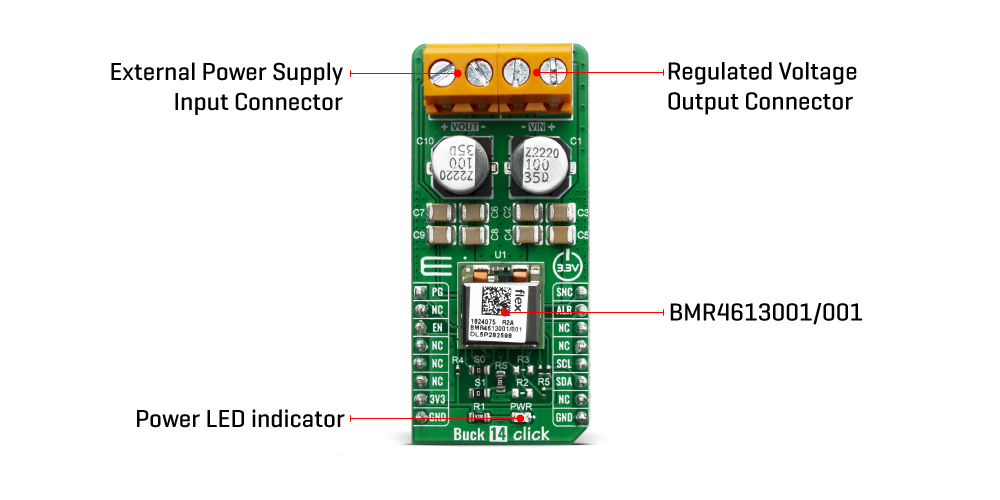
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| PWR | LED GREEN | - | Power LED Indicator |
| VIN | - | - | External Power Supply Input Connector |
| VOUT | - | - | Regulated Voltage Output Connector |
BUCK 14 Click Board™ ELECTRICAL SPECIFICATIONS
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Output voltage | 0.6 | - | 5 | V |
| Output current | 0 | - | 12 | A |
| Input voltage | 4.35 | - | 14 | V |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3847
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606018719525
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.