
Mikroelektronika d.o.o.
MPU 9DOF Click-Platine
MPU 9DOF Click-Platine
SKU: MIKROE-1719
Normaler Preis
£31.50 GBP
ohne MwSt
Normaler Preis
£45.00 GBP
Verkaufspreis
Grundpreis
pro
£31.50 GBP
ohne MwSt
Versand wird beim Checkout berechnet
If no stock shown above, check availability
Verfügbarkeit für Abholungen konnte nicht geladen werden

Overview
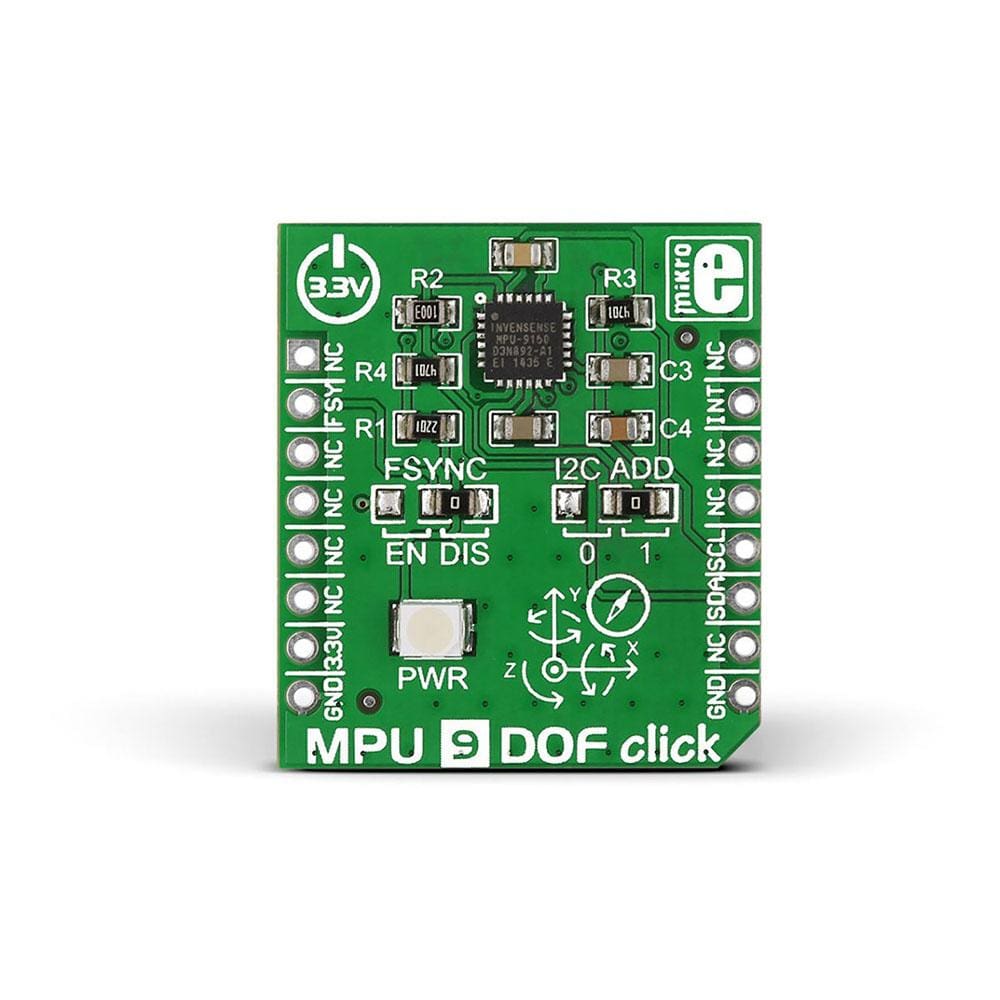
The MPU 9DOF Click Board™ from MikroE is a measurement add-on board that includes the MPU-9150 motion tracking MikroBUS module.
The Click Board™ includes two devices: a MPU-6050 3-Axios Accelerometer and 3-Axis Gyroscope and an AK8975 3-Axis Compass.
Downloads
Das MPU 9DOF Click Board™ von MikroE ist eine Mess-Zusatzkarte, die das MikroBUS-Modul MPU-9150 zur Bewegungsverfolgung enthält.
Das Click Board™ umfasst zwei Geräte: einen MPU-6050 3-Achsen-Beschleunigungsmesser und 3-Achsen-Gyroskop sowie einen AK8975 3-Achsen-Kompass.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-1719
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.03 kg
|
| Other | |
EAN |
8606018714193
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.