

Mikroelektronika d.o.o.
Bürstenloses 23 Click Board
Bürstenloses 23 Click Board
SKU: MIKROE-5100
Verfügbarkeit für Abholungen konnte nicht geladen werden



Key Features
Overview
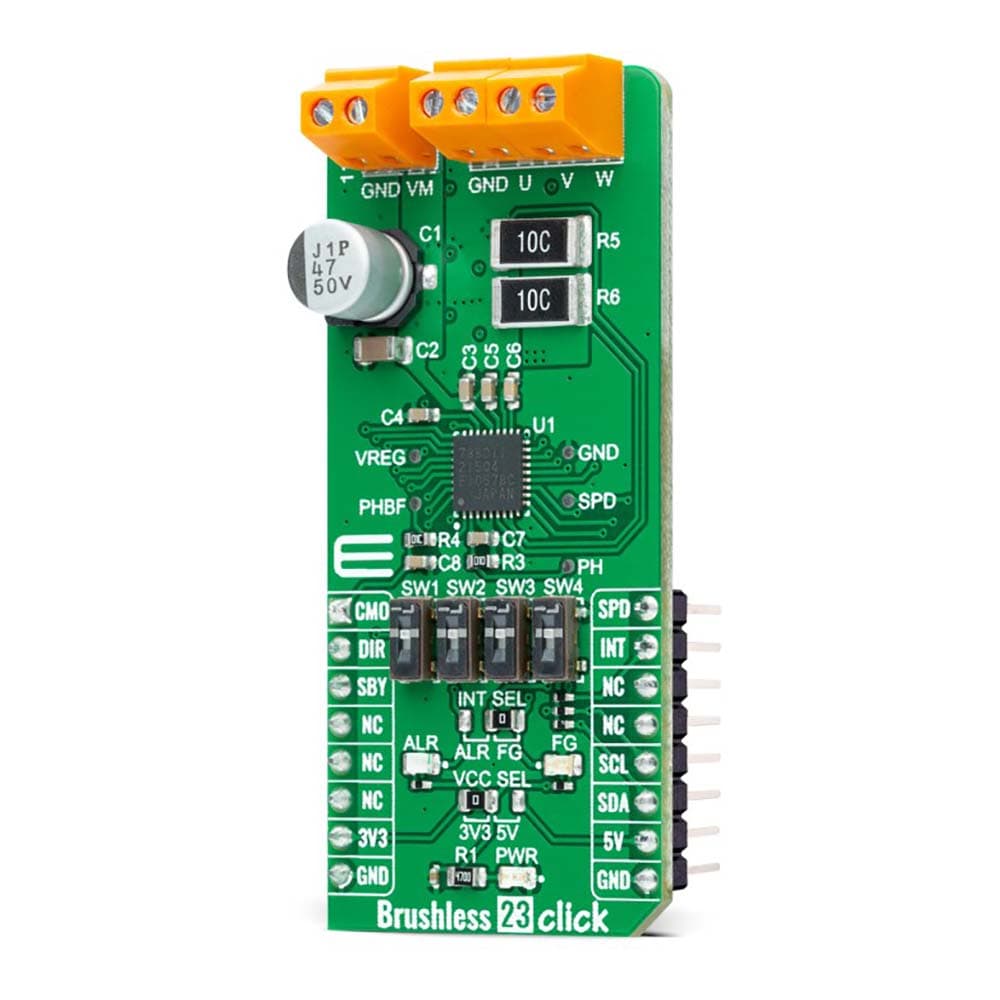
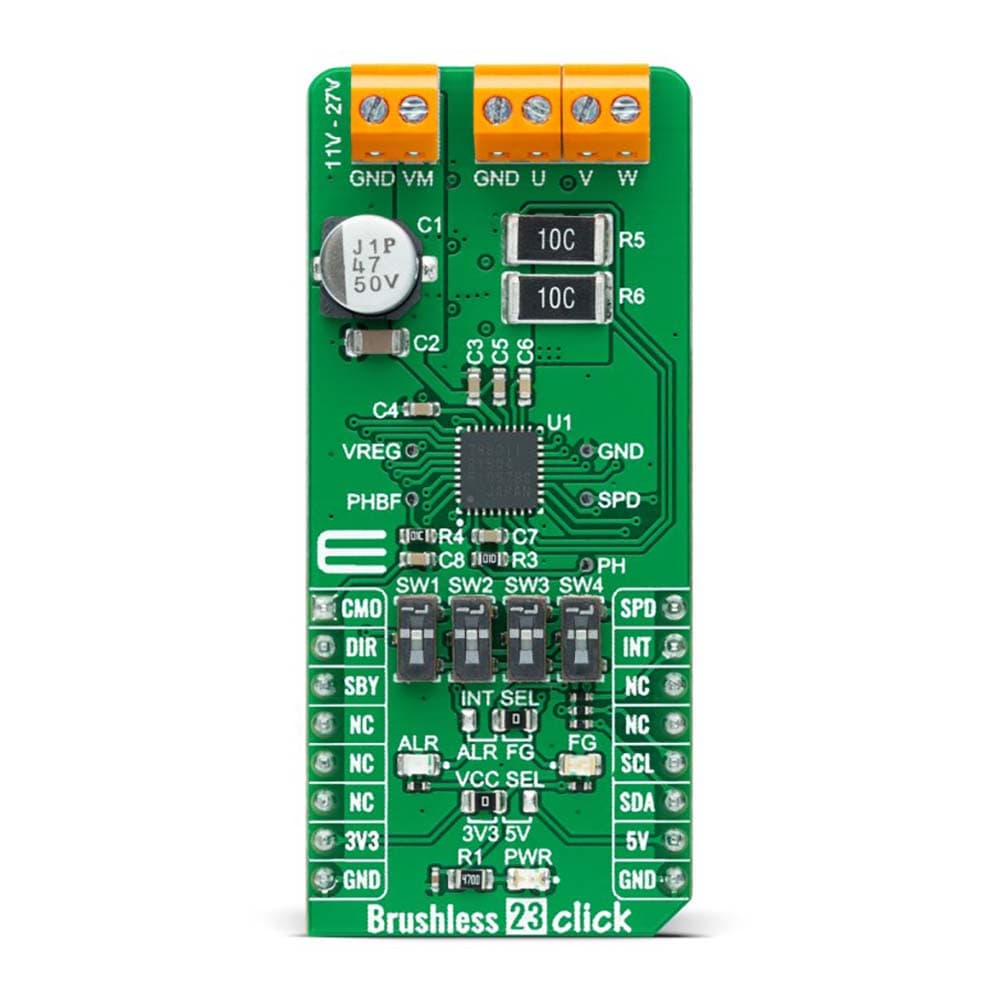
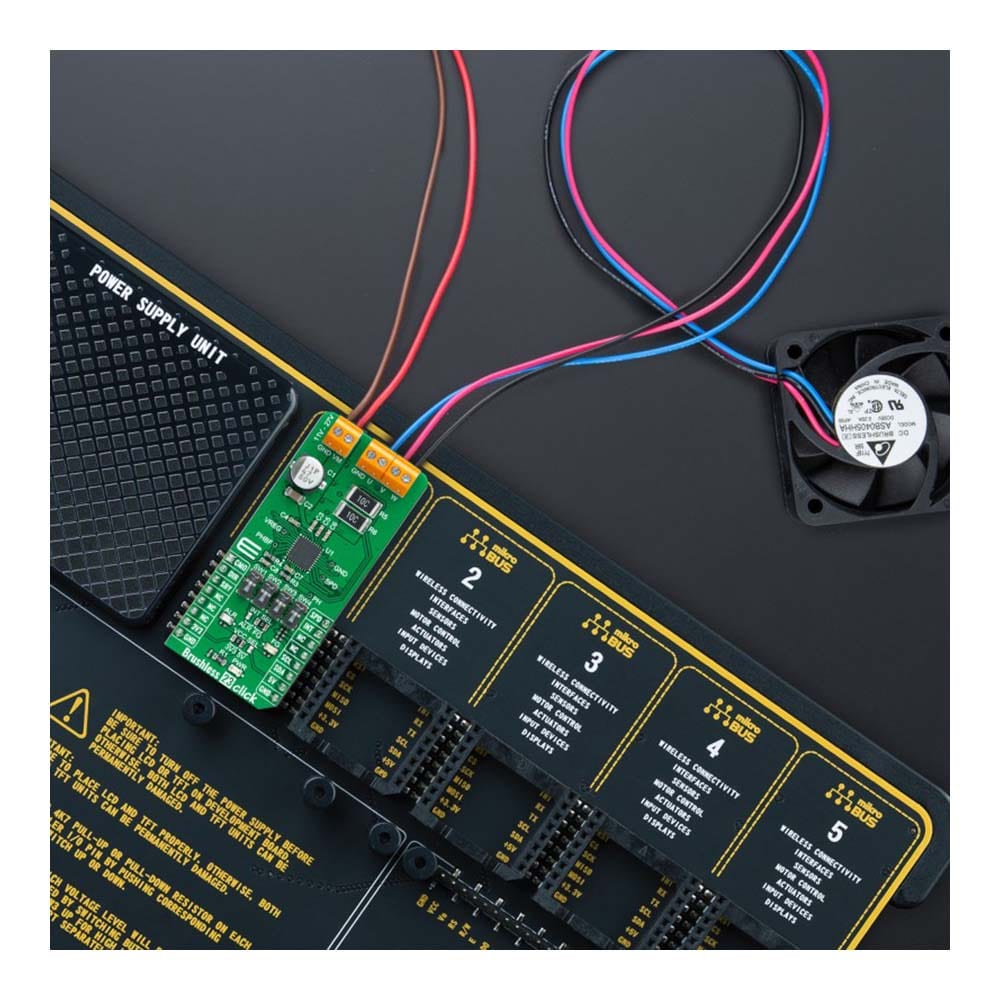
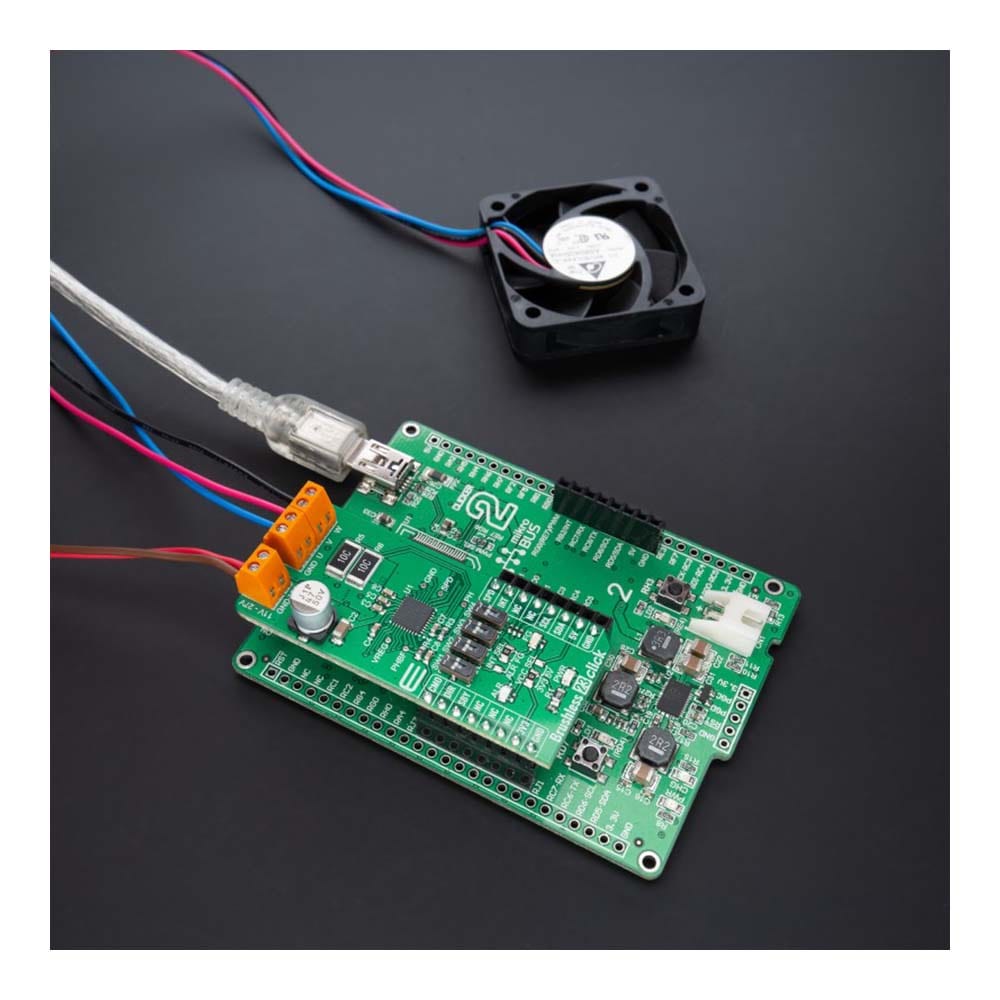
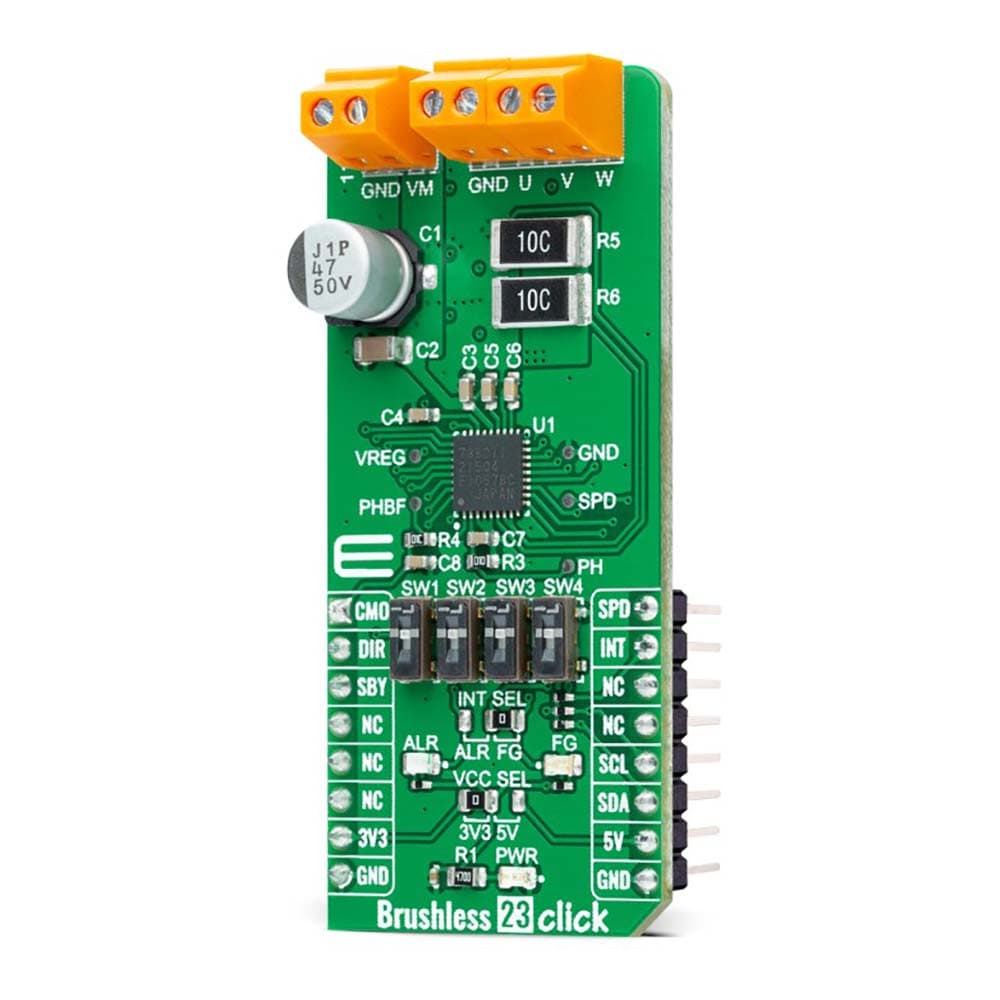
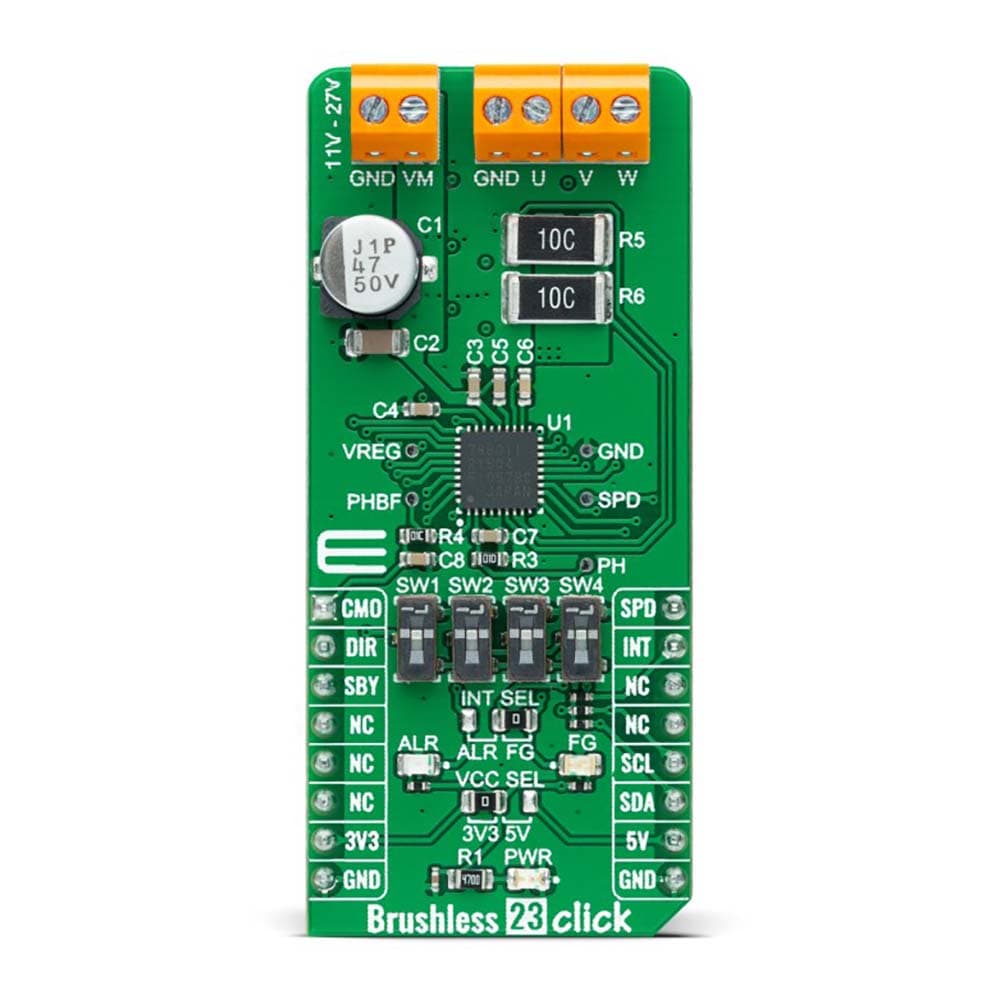
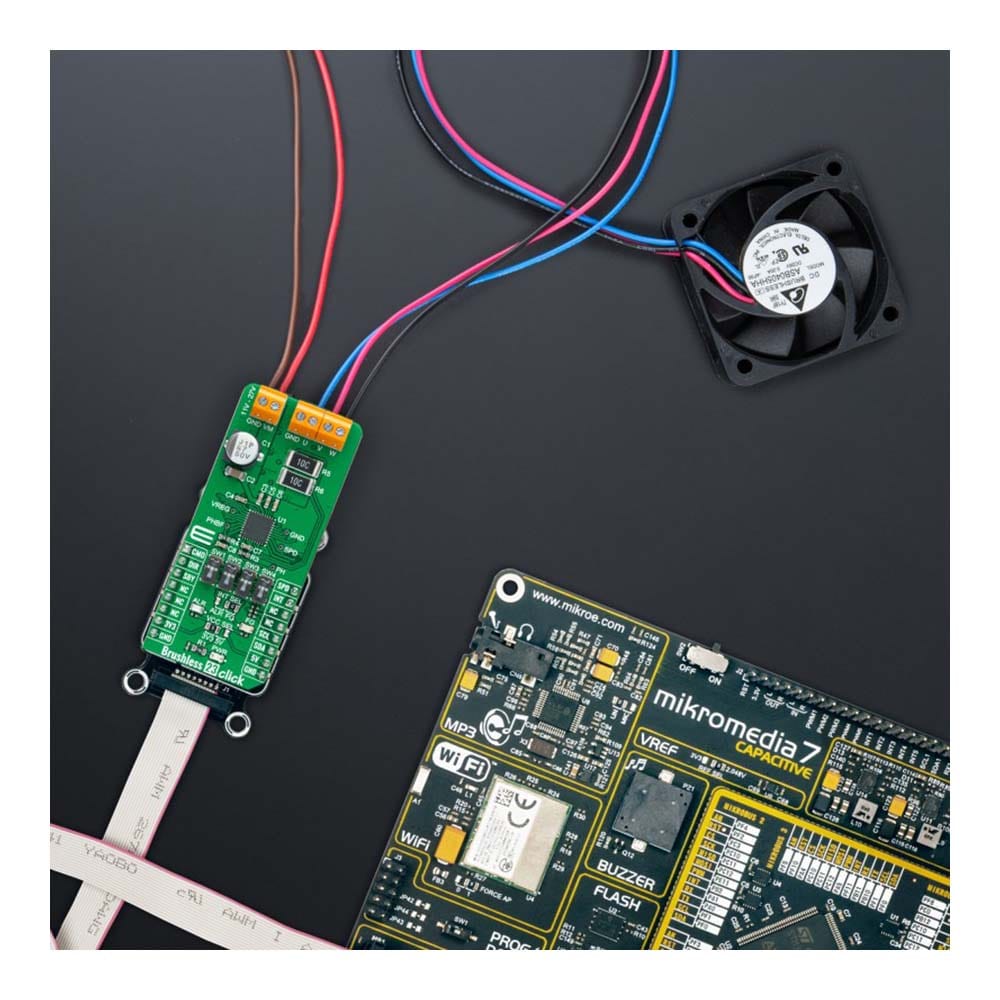
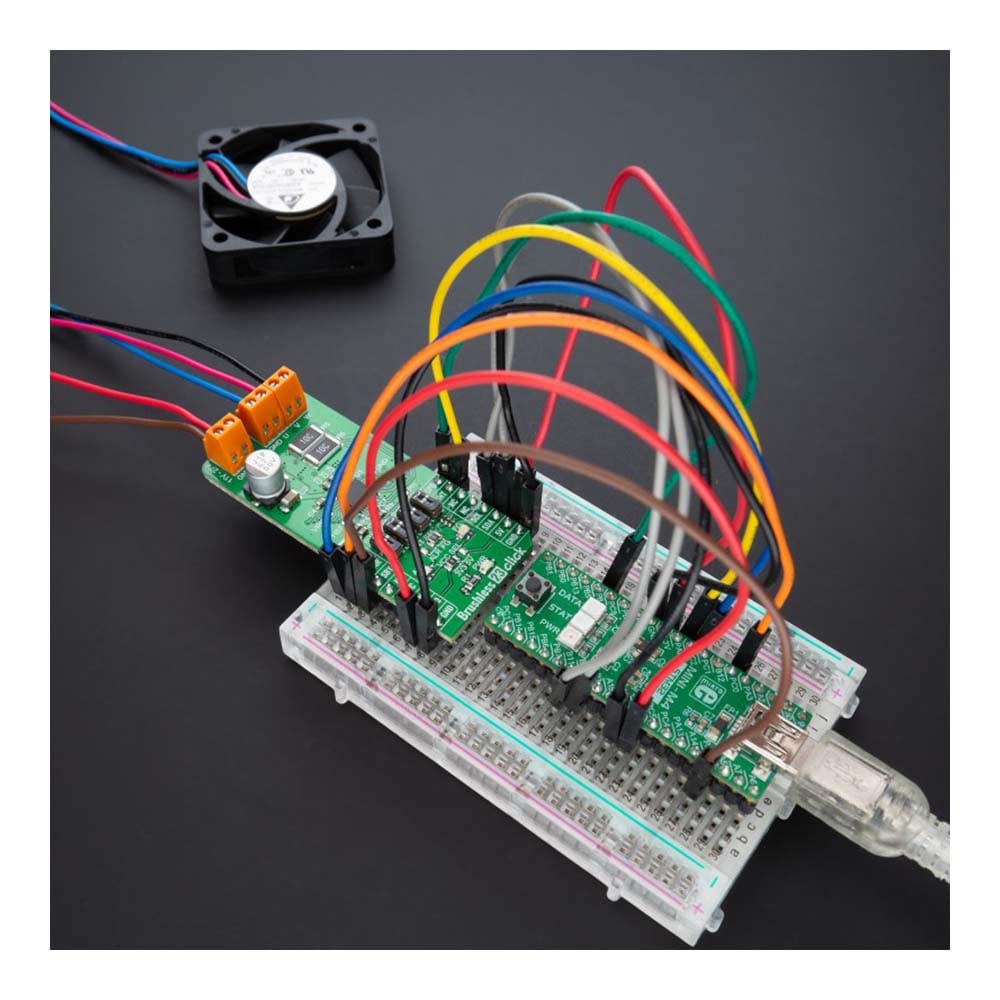
The Brushless 23 Click Board™ is a compact add-on board suitable for controlling BLDC motors with any microcontroller. This board features the TC78B011FTG, a three-phase sine-wave PWM pre-driver realized with six external MOSFETs to drive sensorless brushless motors from Toshiba Semiconductor. Some of the main features are a built-in closed-loop speed control function with internal non-volatile memory (NVM) for speed profile setting and the ability to set other features such as rotation direction selection, brake, Standby mode, and others. It also has a wide operating voltage range of 11V to 27V with an output current capacity of 5A and several built-in error detection circuits. This Click board™ provides optimum operational efficiency in applications such as high-velocity server fans, blowers, and pumps.
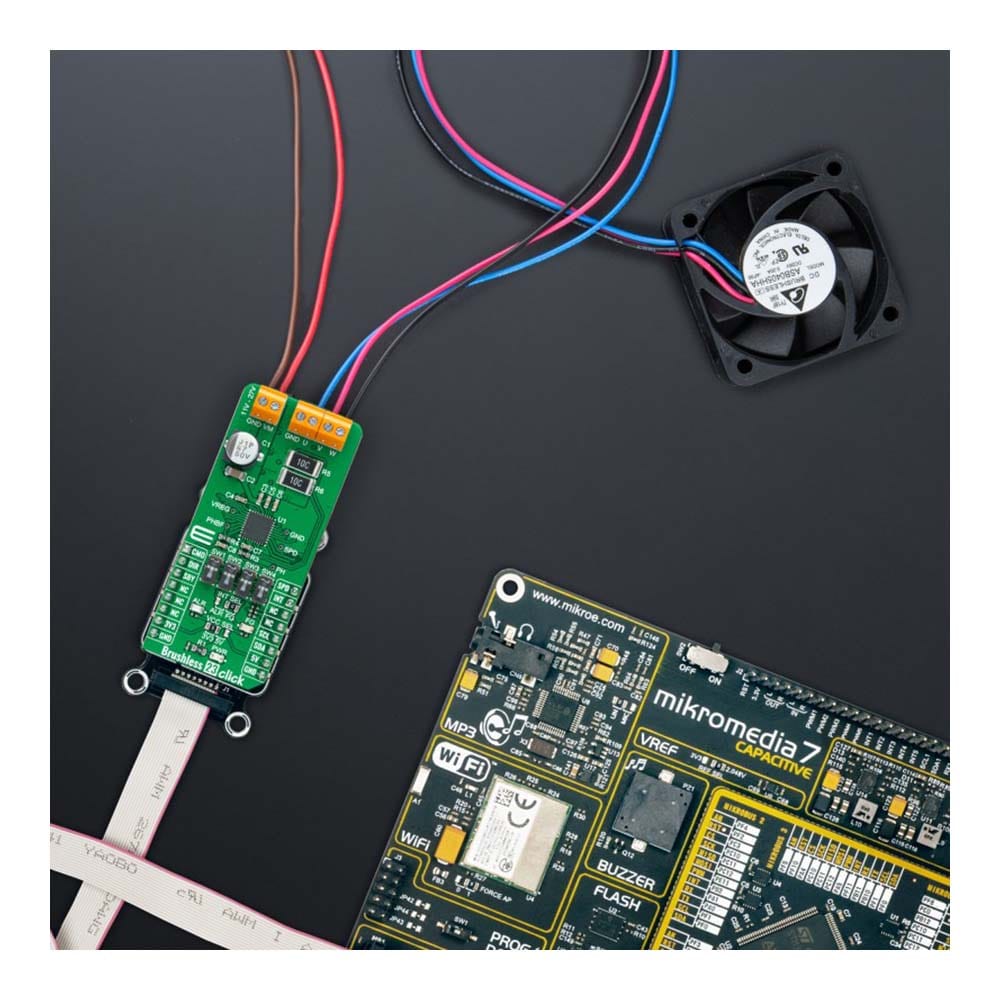
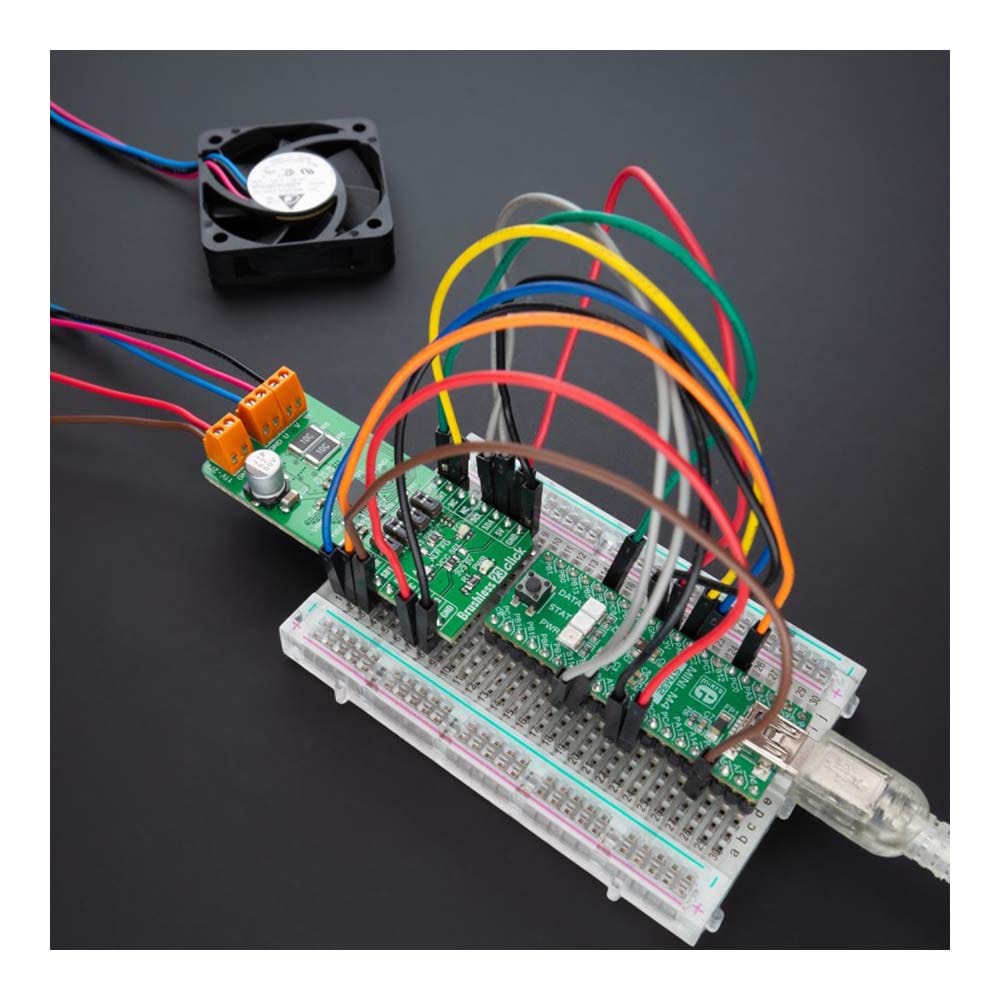
The Brushless 23 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das Brushless 23 Click Board™ ist eine kompakte Zusatzplatine, die sich zur Steuerung von BLDC-Motoren mit jedem Mikrocontroller eignet. Diese Platine verfügt über den TC78B011FTG, einen dreiphasigen Sinuswellen-PWM-Vortreiber, der mit sechs externen MOSFETs realisiert wurde, um sensorlose bürstenlose Motoren von Toshiba Semiconductor anzutreiben. Einige der Hauptfunktionen sind eine integrierte Drehzahlregelungsfunktion mit internem nichtflüchtigem Speicher (NVM) zur Einstellung des Drehzahlprofils und die Möglichkeit, andere Funktionen wie Drehrichtungsauswahl, Bremse, Standby-Modus und andere einzustellen. Es verfügt außerdem über einen großen Betriebsspannungsbereich von 11 V bis 27 V mit einer Ausgangsstromkapazität von 5 A und mehreren integrierten Fehlererkennungsschaltungen. Dieses Click Board™ bietet optimale Betriebseffizienz in Anwendungen wie Hochgeschwindigkeits-Serverlüftern, Gebläsen und Pumpen.
Das Brushless 23 Click Board™ wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-5100
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027388972
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.