



Mikroelektronika d.o.o.
Haptische 3-Klick-Platine
Haptische 3-Klick-Platine
SKU: MIKROE-5087
Verfügbarkeit für Abholungen konnte nicht geladen werden



Overview
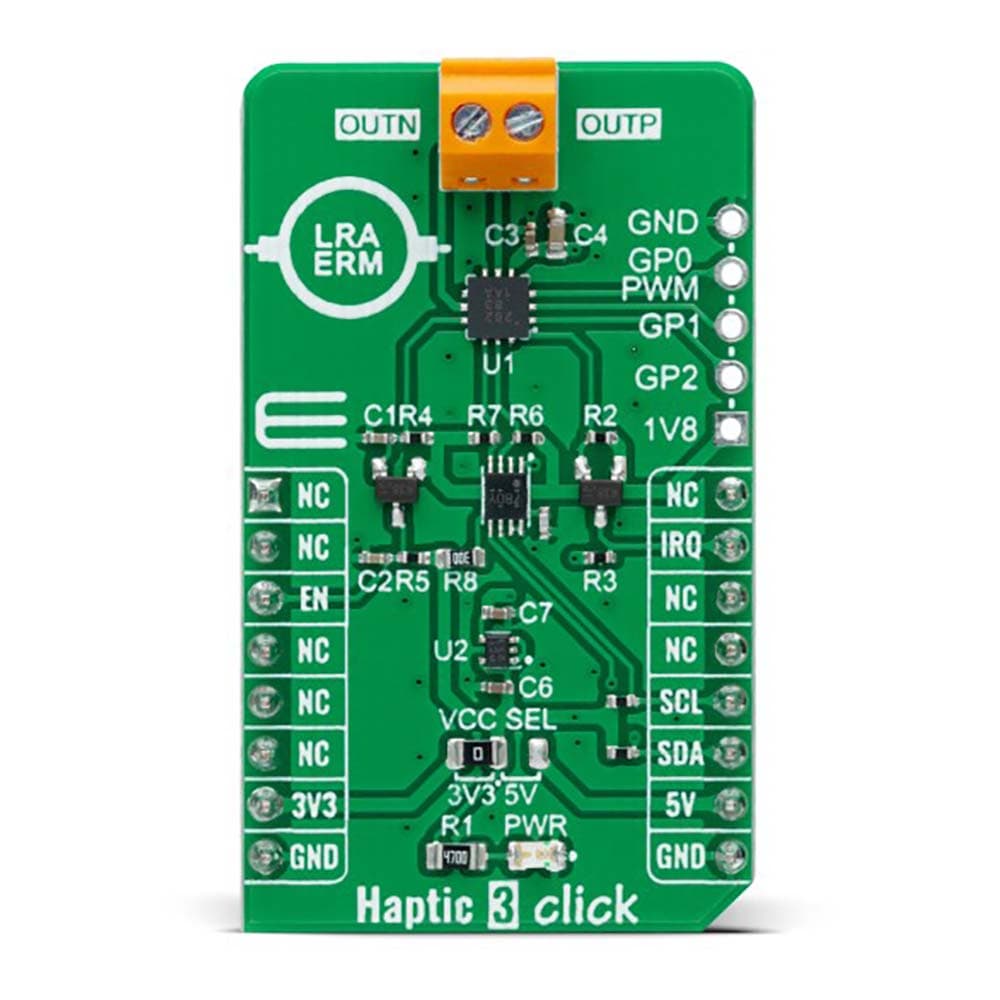
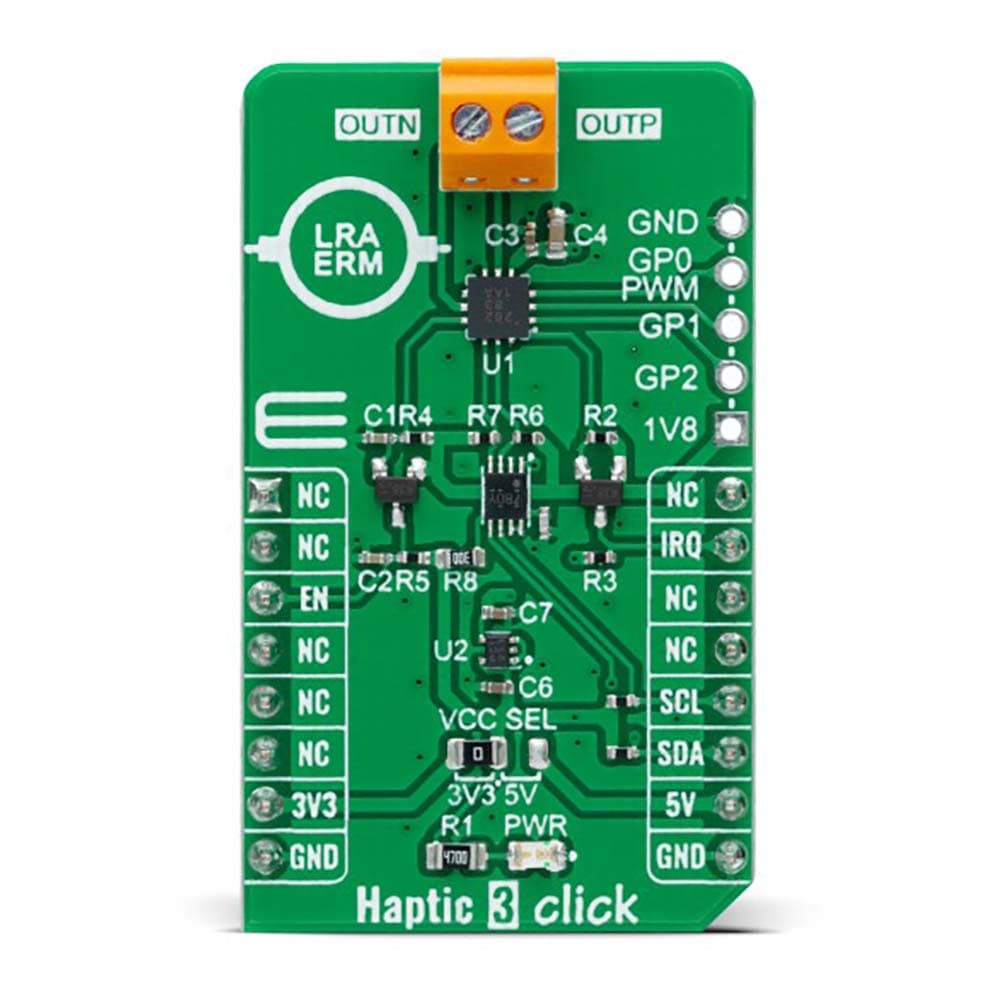
The Haptic 3 Click Board™ is a compact add-on board that uses advanced vibration patterns and waveforms to convey information to a user. This board features the DA7282, a linear resonant actuator (LRA), and an eccentric rotating mass (ERM) haptic driver from Dialog Semiconductor. The DA7282 features LRA or ERM drive capability with automatic closed-loop LRA resonant frequency tracking, guaranteeing consistency across LRA production tolerances. It also offers wideband operation that fully utilizes the capabilities of newer wideband and multi-directional LRAs, alongside three external general-purpose inputs for triggering up to six independent haptic sequences. This Click board™ is suitable for numerous everyday applications such as indicator systems, training equipment/simulators with haptics function, robotics and mechatronics, and more.
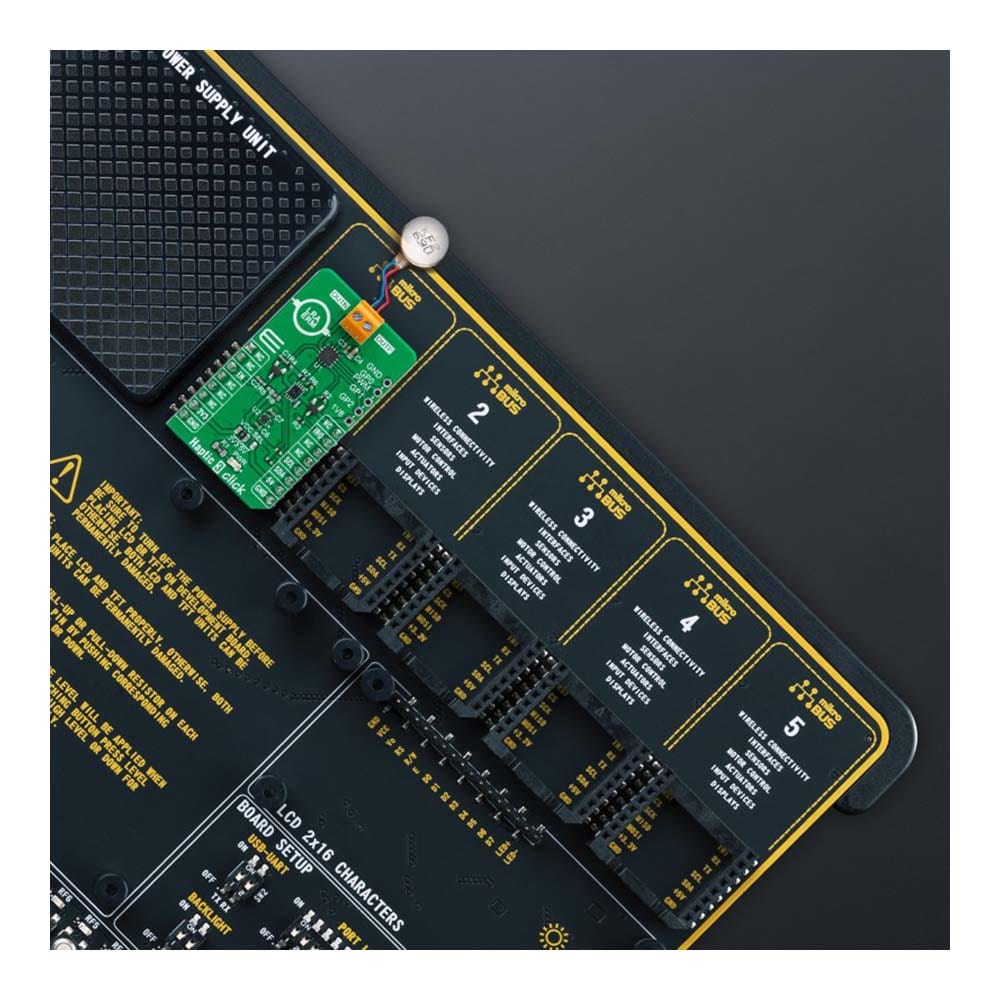
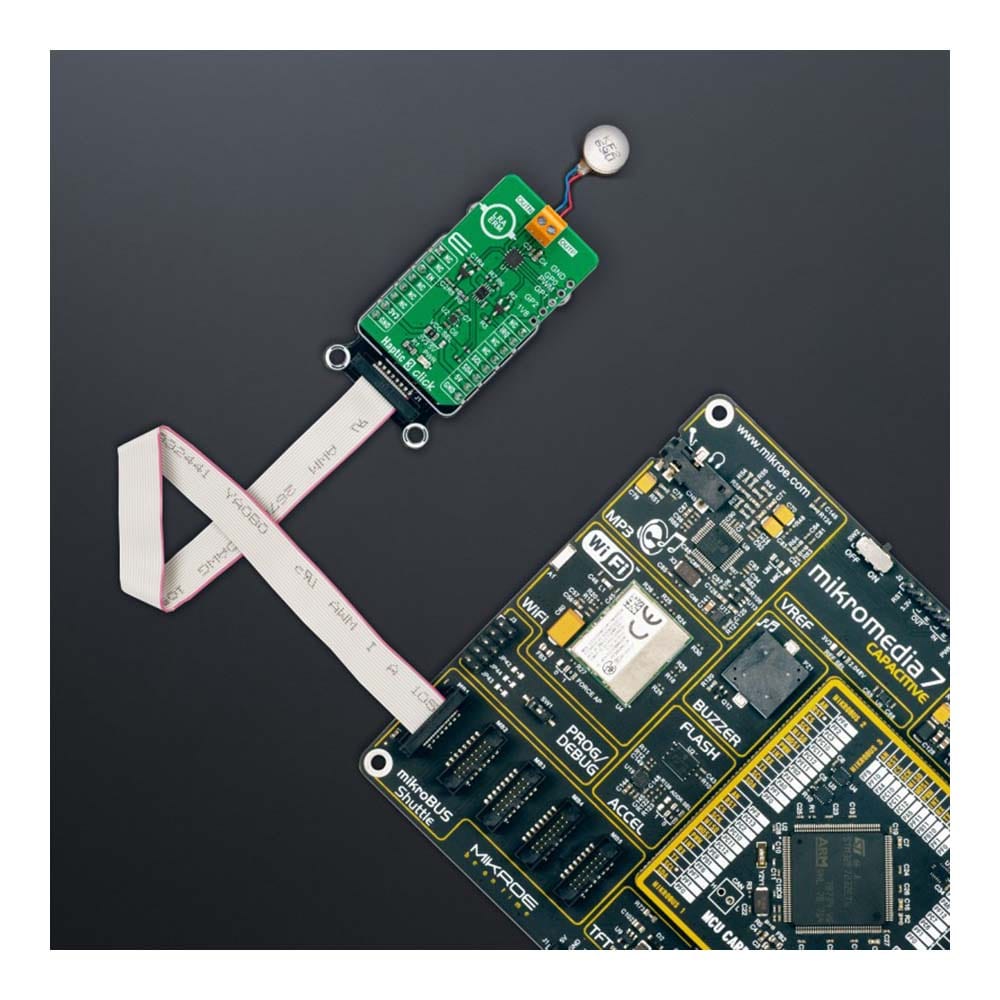
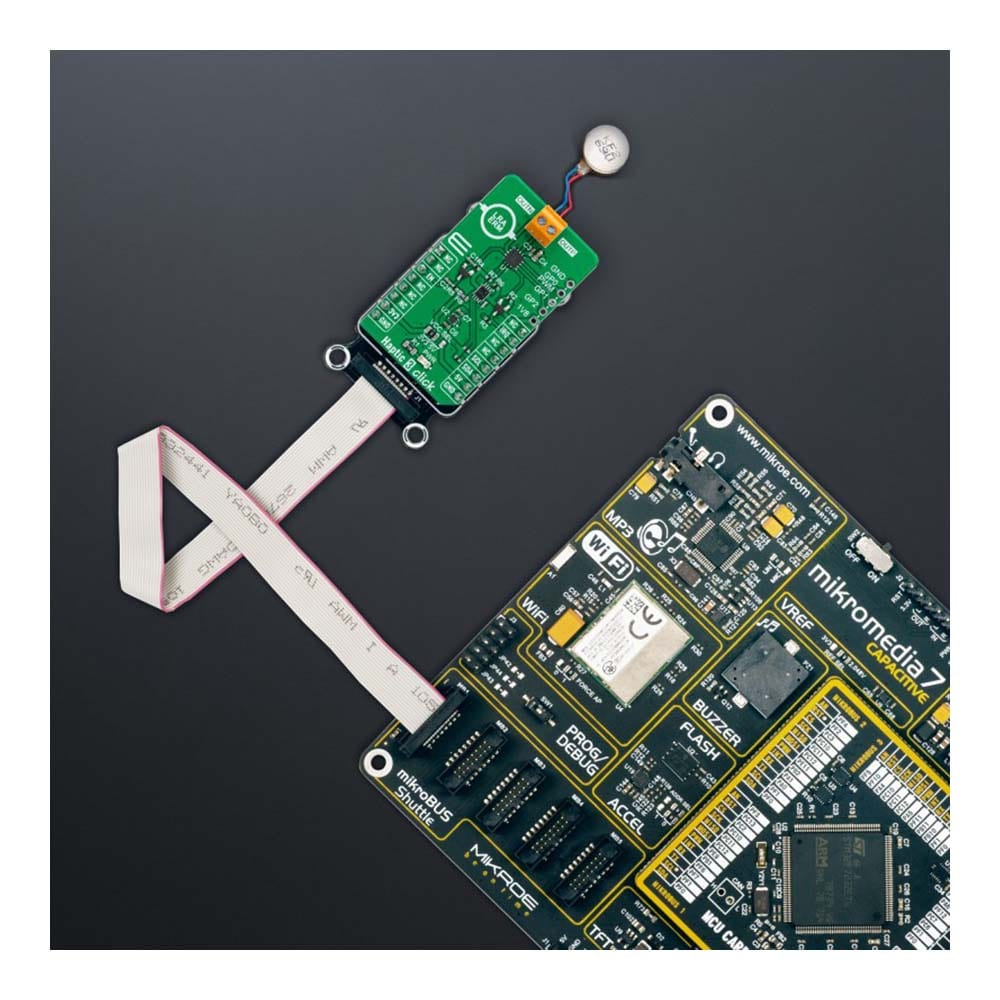
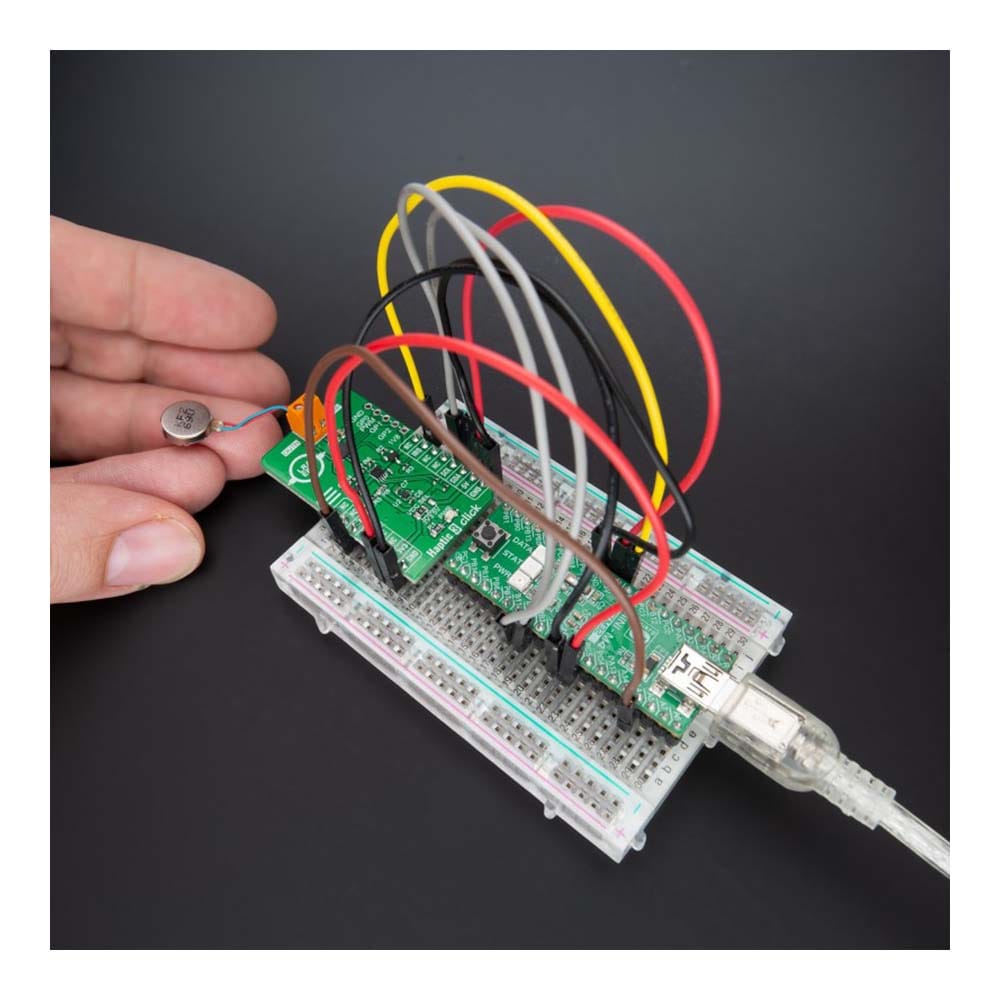
The Haptic 3 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das Haptic 3 Click Board™ ist eine kompakte Zusatzplatine, die erweiterte Vibrationsmuster und Wellenformen verwendet, um Informationen an einen Benutzer zu übermitteln. Diese Platine verfügt über den DA7282, einen linearen Resonanzaktuator (LRA) und einen haptischen Treiber mit exzentrischer rotierender Masse (ERM) von Dialog Semiconductor. Der DA7282 verfügt über LRA- oder ERM-Antriebsfunktionen mit automatischer geschlossener LRA-Resonanzfrequenzverfolgung, die Konsistenz über alle LRA-Produktionstoleranzen hinweg garantiert. Es bietet außerdem einen Breitbandbetrieb, der die Funktionen neuerer breitbandiger und multidirektionaler LRAs voll ausnutzt, sowie drei externe Allzweckeingänge zum Auslösen von bis zu sechs unabhängigen haptischen Sequenzen. Dieses Click Board™ eignet sich für zahlreiche alltägliche Anwendungen wie Anzeigesysteme, Trainingsgeräte/Simulatoren mit haptischer Funktion, Robotik und Mechatronik und mehr.
Das Haptic 3 Click Board™ wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-5087
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027389016
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.