







Mikroelektronika d.o.o.
Multi-Stepper TB62262 Click-Platine
Multi-Stepper TB62262 Click-Platine
SKU: MIKROE-5037
Verfügbarkeit für Abholungen konnte nicht geladen werden

Overview
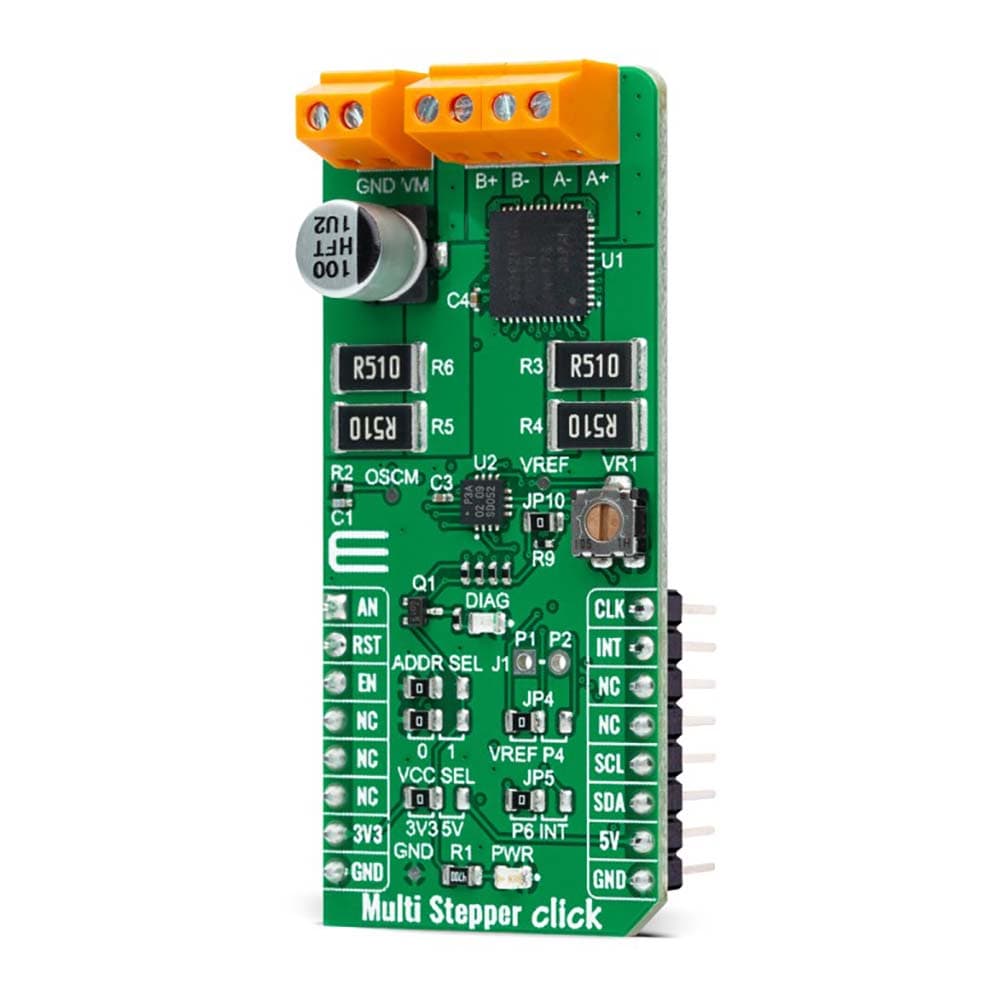
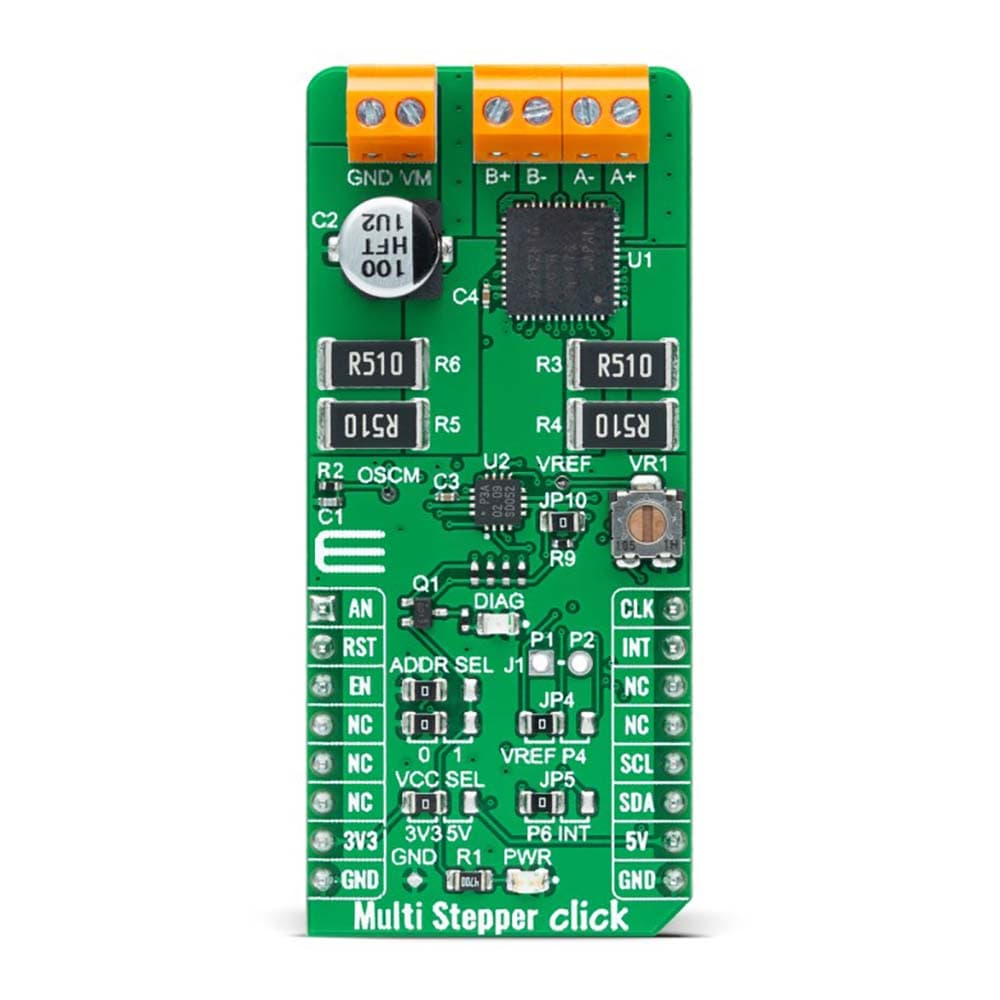
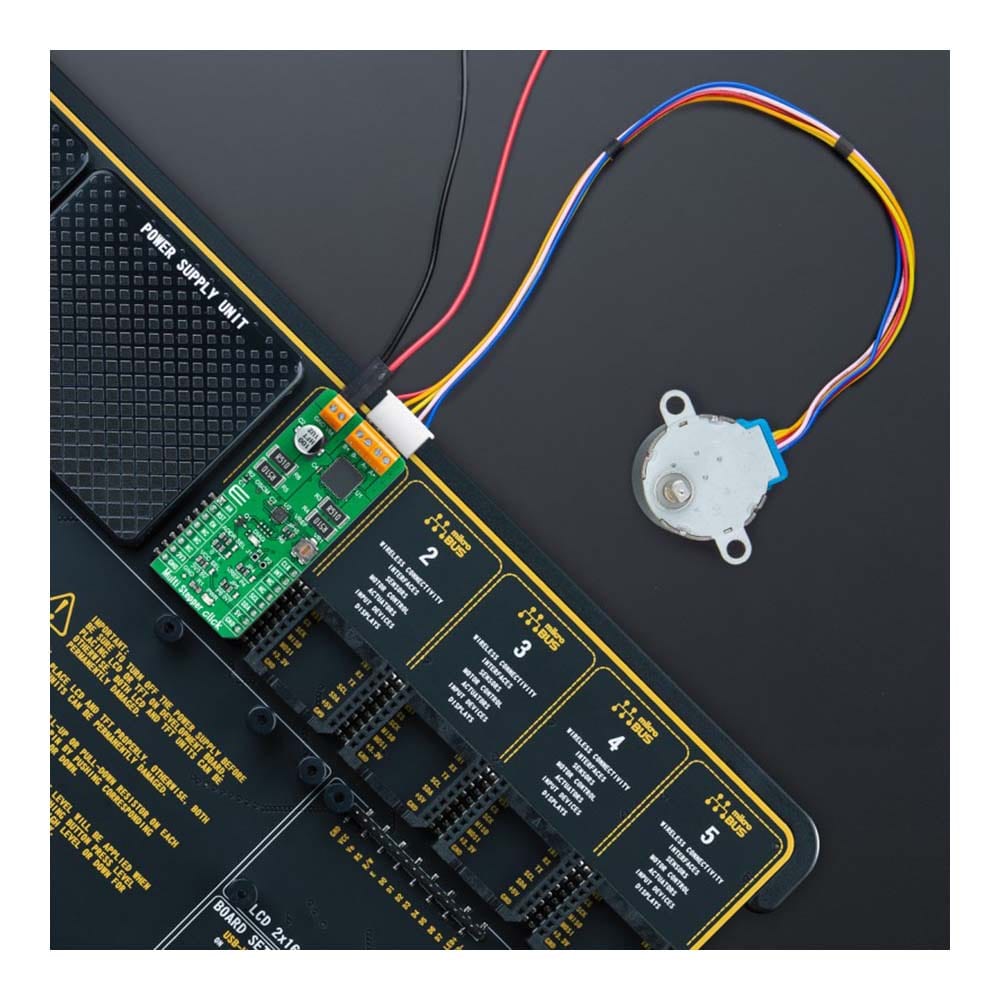
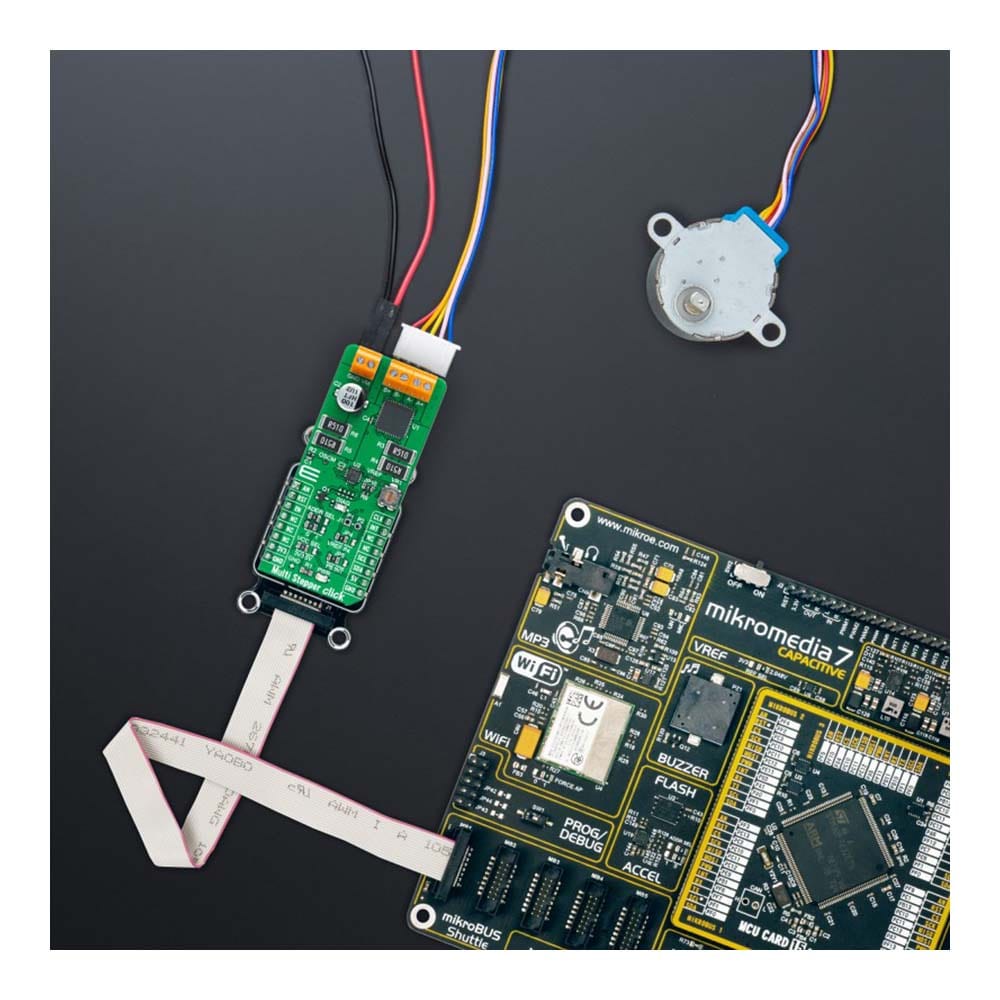
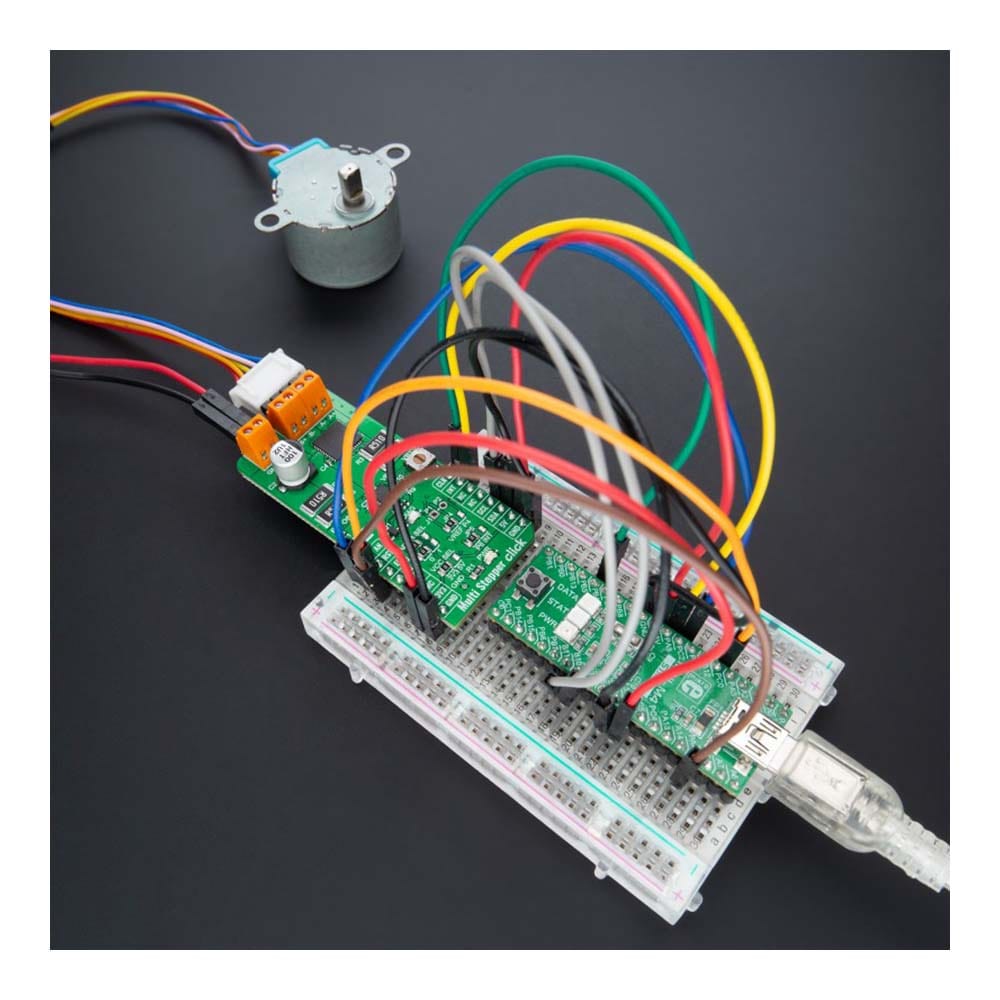
The Multi Stepper TB62262 Click Board™ is a compact add-on board that contains a bipolar stepper motor driver. This board features the TB62262FTG, CLOCK-in controlled bipolar stepping motor driver from Toshiba Semiconductor. It supports a PWM constant-current control drive and allows full-, half-, and quarter-step operation for less motor noise and smoother control. It has a wide operating voltage range of 10V to 38V with an output current capacity of 1.2A and several built-in error detection circuits. This Click board™ makes the perfect solution for stepping motors in various applications such as office automation, commercial and industrial equipment.
The Multi Stepper TB62262 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das Multi Stepper TB62262 Click Board™ ist eine kompakte Zusatzplatine, die einen bipolaren Schrittmotortreiber enthält. Diese Platine verfügt über den TB62262FTG, einen CLOCK-in-gesteuerten bipolaren Schrittmotortreiber von Toshiba Semiconductor. Es unterstützt einen PWM-Konstantstrom-Steuerantrieb und ermöglicht Voll-, Halb- und Viertelschrittbetrieb für weniger Motorgeräusche und eine sanftere Steuerung. Es verfügt über einen großen Betriebsspannungsbereich von 10 V bis 38 V mit einer Ausgangsstromkapazität von 1,2 A und mehreren integrierten Fehlererkennungsschaltungen. Dieses Click Board™ ist die perfekte Lösung für Schrittmotoren in verschiedenen Anwendungen wie Büroautomatisierung, gewerblichen und industriellen Geräten.
Das Multi Stepper TB62262 Click Board™ wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ ist ein gründlich getestetes Produkt und kann auf einem System verwendet werden, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-5037
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027389153
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.