








Mikroelektronika d.o.o.
DC-Motor 20 Click-Platine
DC-Motor 20 Click-Platine
SKU: MIKROE-4884
Verfügbarkeit für Abholungen konnte nicht geladen werden


Overview
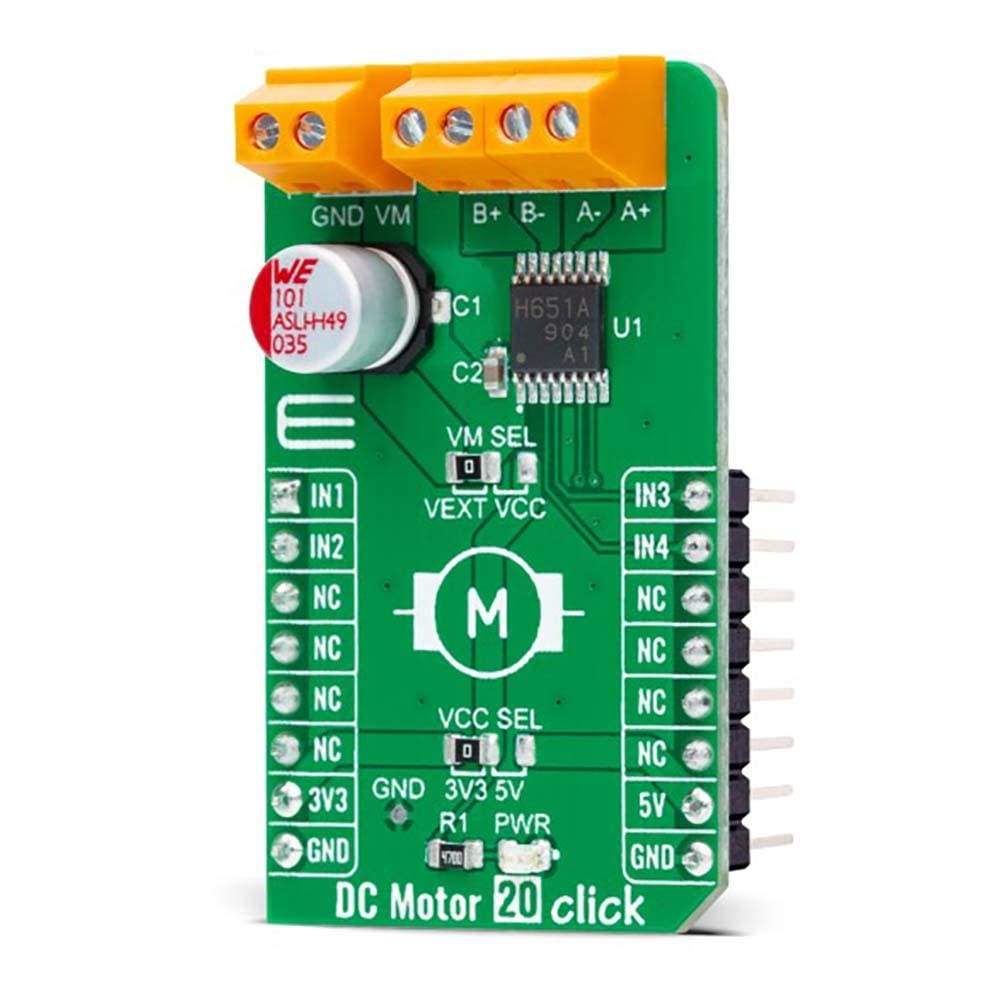
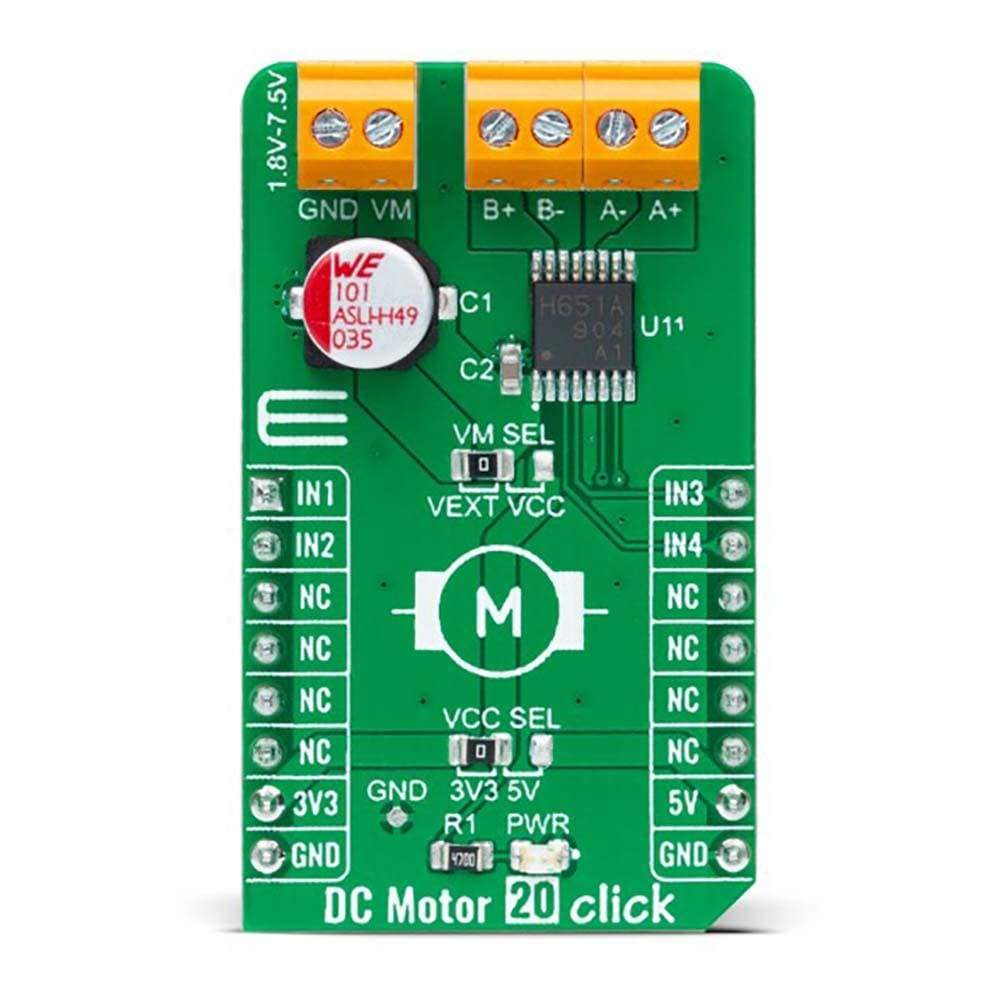
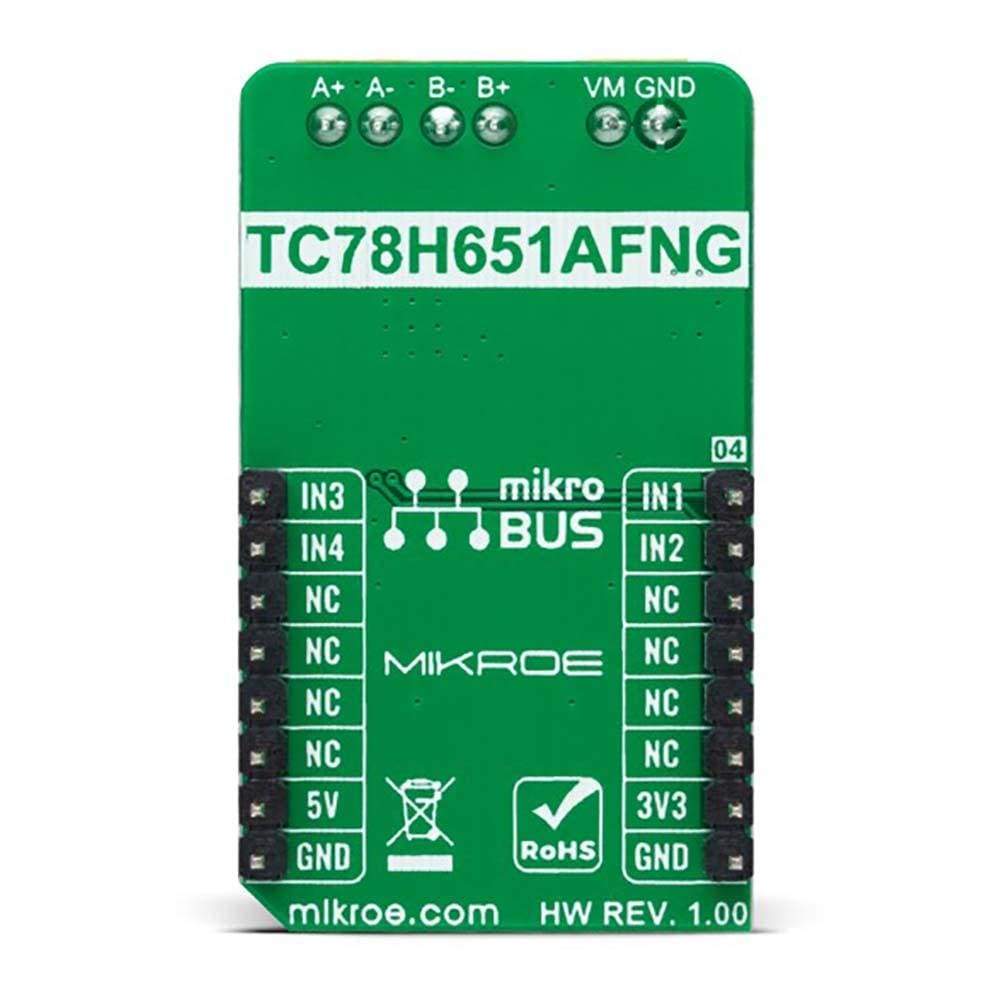
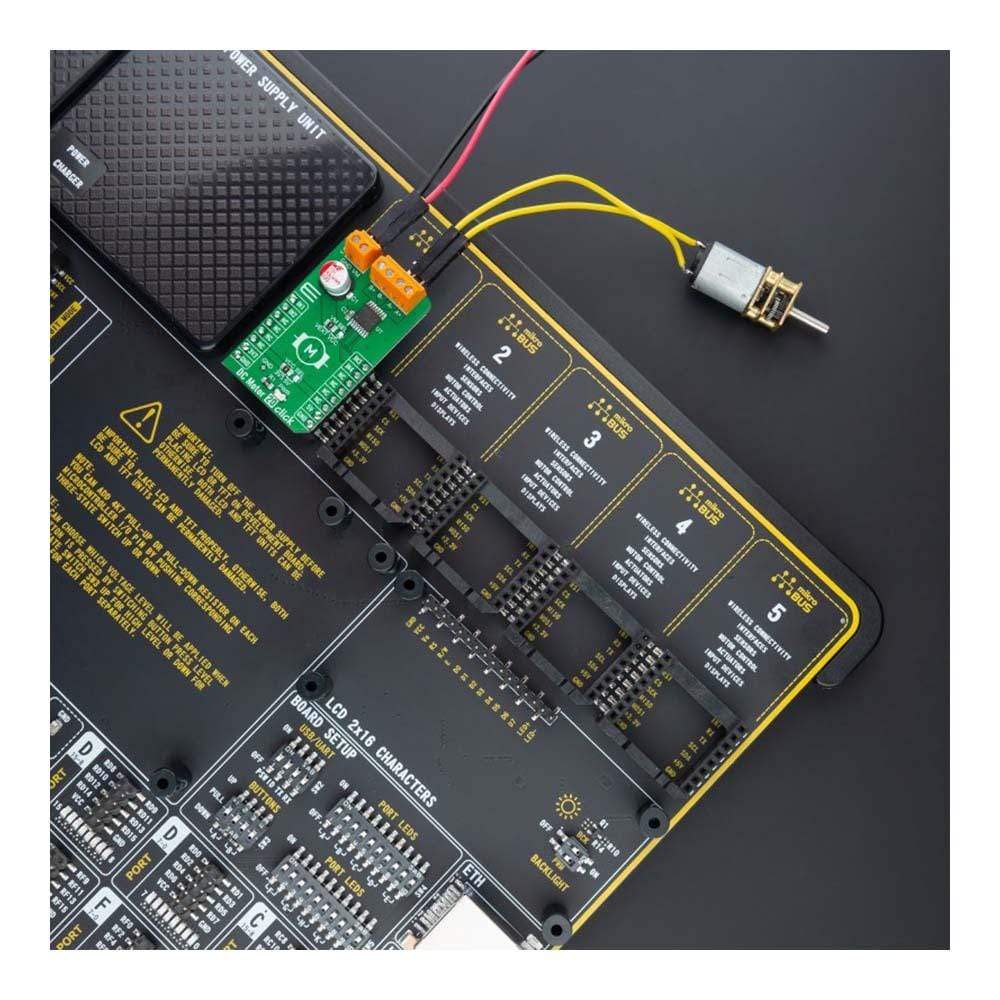
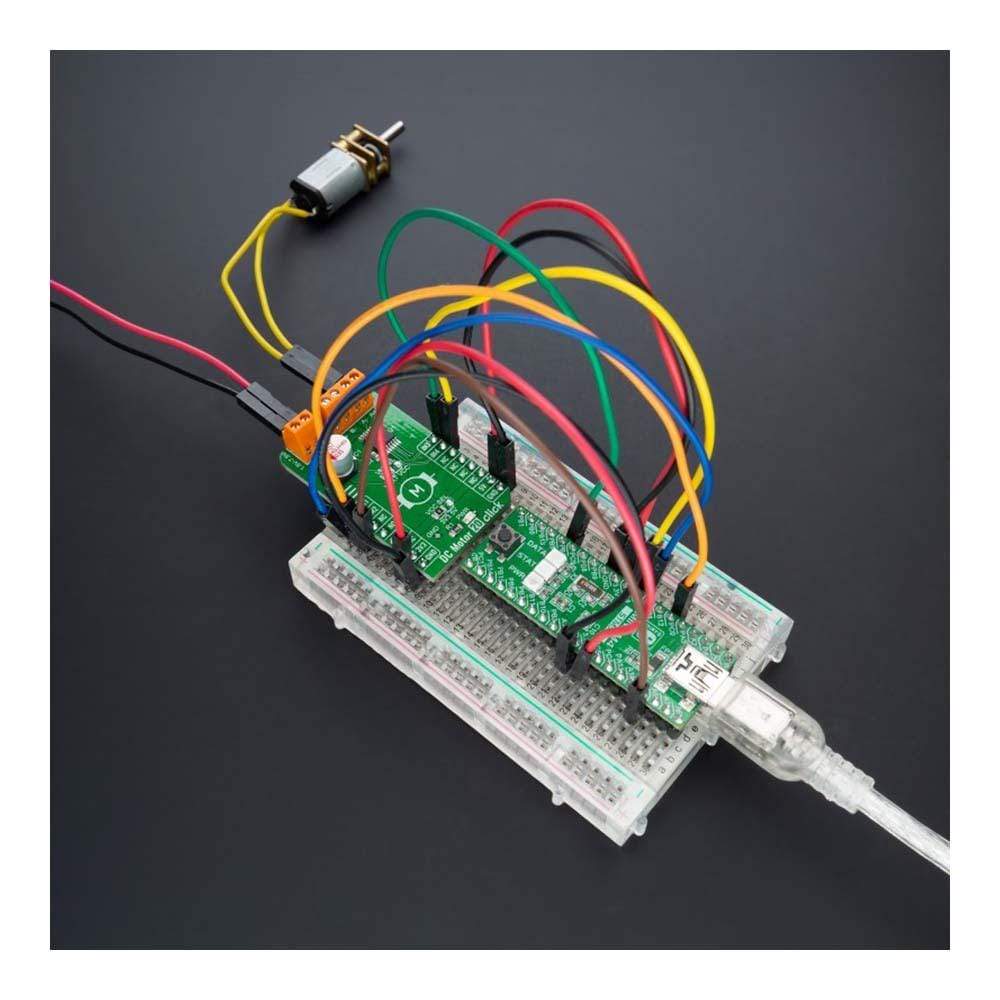
The DC Motor 20 Click Board™ is a compact add-on board that contains a brushed DC motor driver. This board features the TC78H651AFNG, a dual H-bridge driver for one or two DC brushed motors, which incorporates DMOS with low ON resistance in output transistors from Toshiba Semiconductor. The Forward/Reverse/Stop mode can be selected according to the state of its input control signals routed to the GPIO pins of the mikroBUS™ socket. It has a wide operating voltage range of 1.8V to 7.5V with an output current capacity of 2A maximum. Besides, it also features built-in protection against under-voltage, overcurrent, and overtemperature conditions.
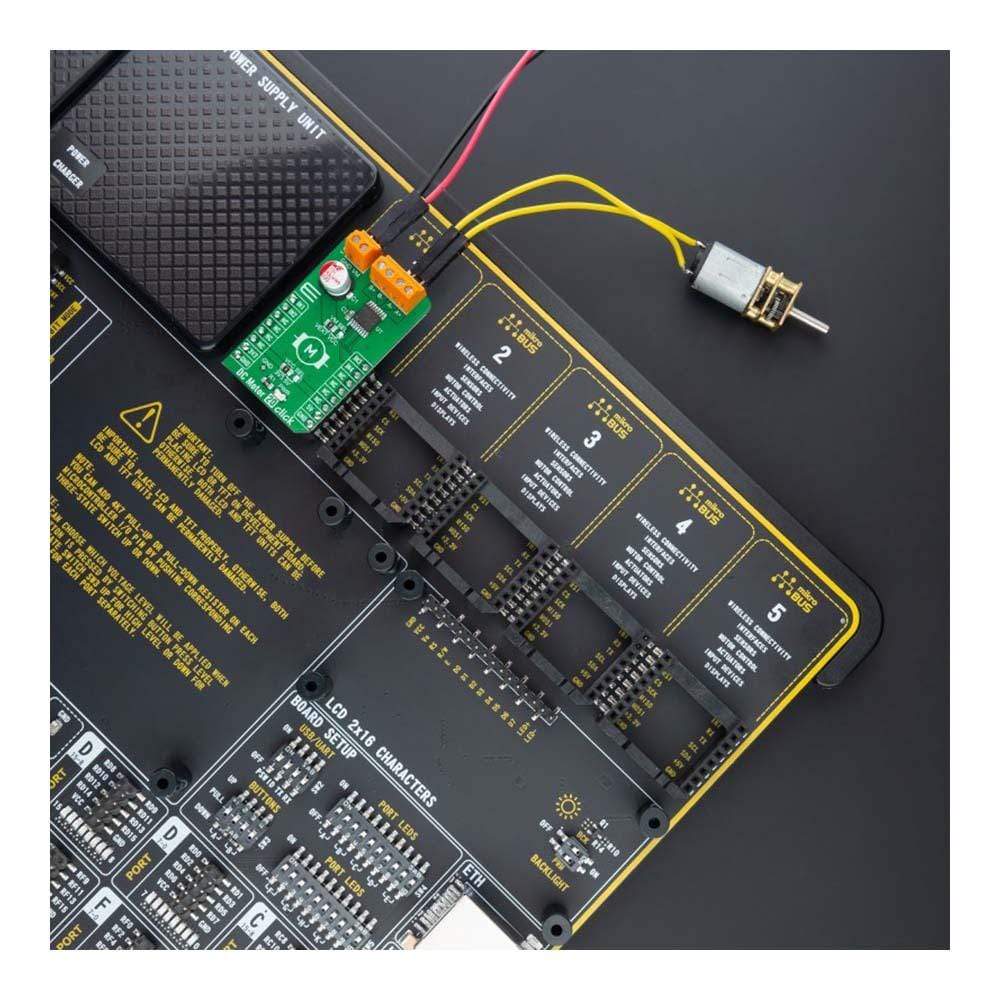
The DC Motor 20 Click Board™ is suitable for driving DC brushed motors and stepping motors for low voltage equipment.
Downloads
Der Gleichstrommotor 20 Click Board™ ist eine kompakte Zusatzplatine, die einen Treiber für einen bürstenbehafteten Gleichstrommotor enthält. Diese Platine enthält den TC78H651AFNG, einen dualen H-Brückentreiber für einen oder zwei bürstenbehaftete Gleichstrommotoren, der DMOS mit niedrigem Einschaltwiderstand in Ausgangstransistoren von Toshiba Semiconductor enthält. Der Vorwärts-/Rückwärts-/Stopp-Modus kann entsprechend dem Zustand seiner Eingangssteuersignale ausgewählt werden, die an die GPIO-Pins der mikroBUS™-Buchse weitergeleitet werden. Es verfügt über einen weiten Betriebsspannungsbereich von 1,8 V bis 7,5 V mit einer Ausgangsstromkapazität von maximal 2 A. Darüber hinaus verfügt es über einen integrierten Schutz gegen Unterspannung, Überstrom und Übertemperatur.
Das DC Motor 20 Click Board™ eignet sich zum Antrieb von Gleichstrom-Bürstenmotoren und Schrittmotoren für Niederspannungsgeräte.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4884
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027384059
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.