




Mikroelektronika d.o.o.
Haptic 2 Click Board™
Haptic 2 Click Board™
SKU: MIKROE-4452
Verfügbarkeit für Abholungen konnte nicht geladen werden




Overview
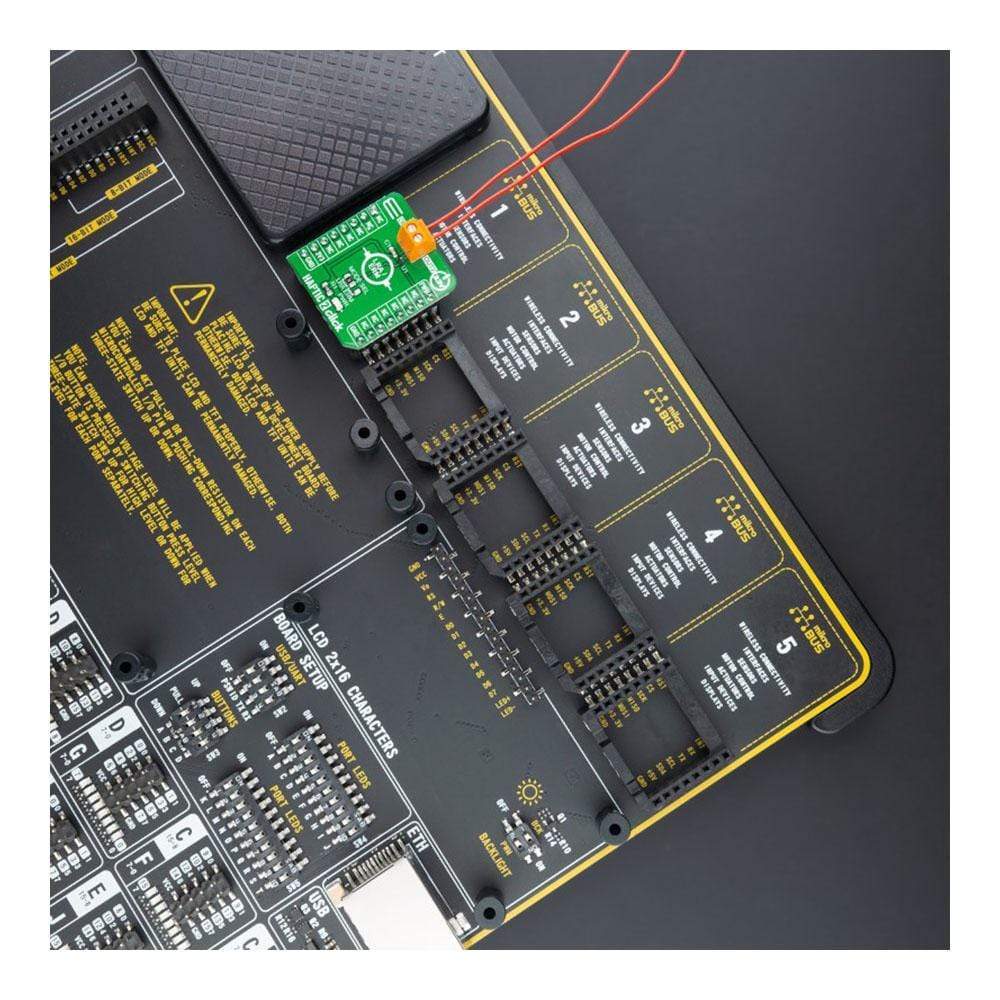
The Haptic 2 Click Board™ is a compact add-on board with a linear vibration driver. This board features the LC898302AXA, a motor driver dedicated to LRA and ERM applications from ON Semiconductor. Controlled by only one pin, it allows crisp vibration thanks to automatic braking and over-driving feature and ignores the deviation of resonance frequency thanks to auto-tuning function. The original driving waveform will enable you to reduce power consumption, and it is helpful to maintain battery lifetime. This Click Board™ is suitable for numerous everyday applications such as indicator systems, game consoles, training equipment/simulators with haptics function, robotics and mechatronics, and many more.
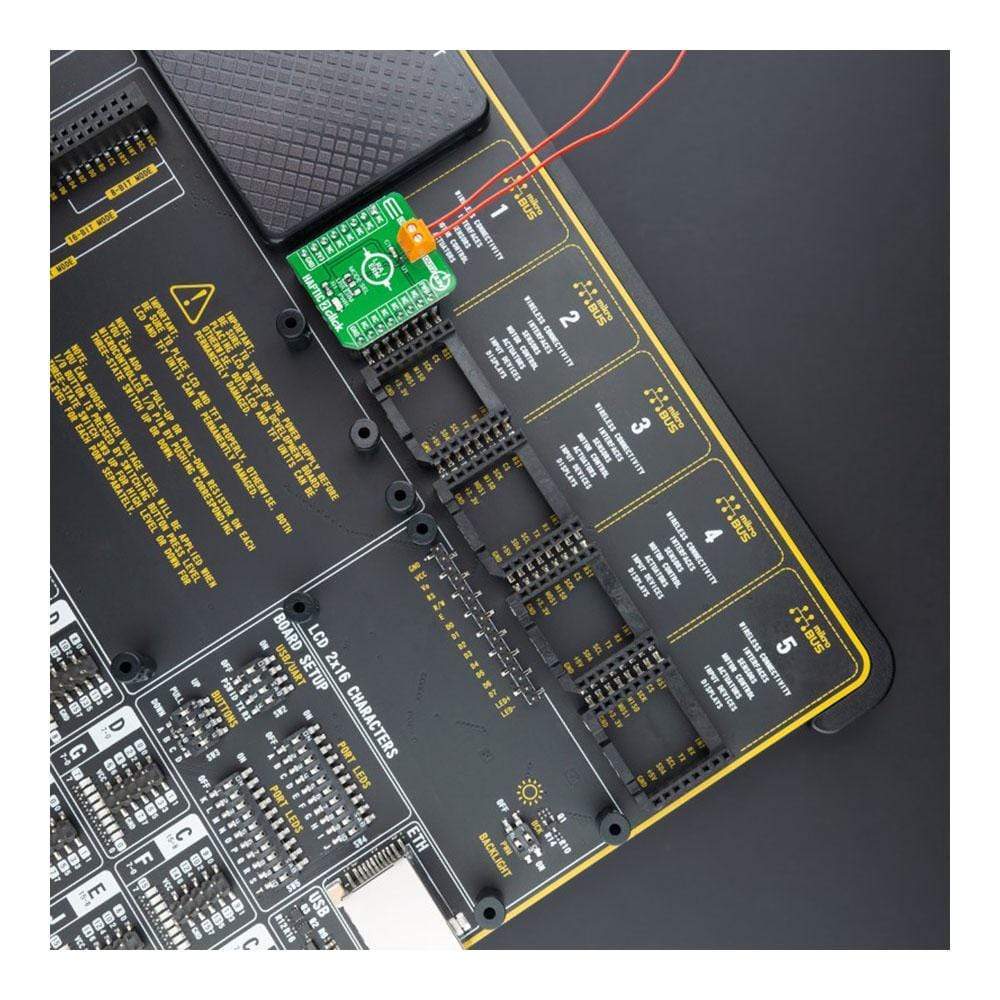
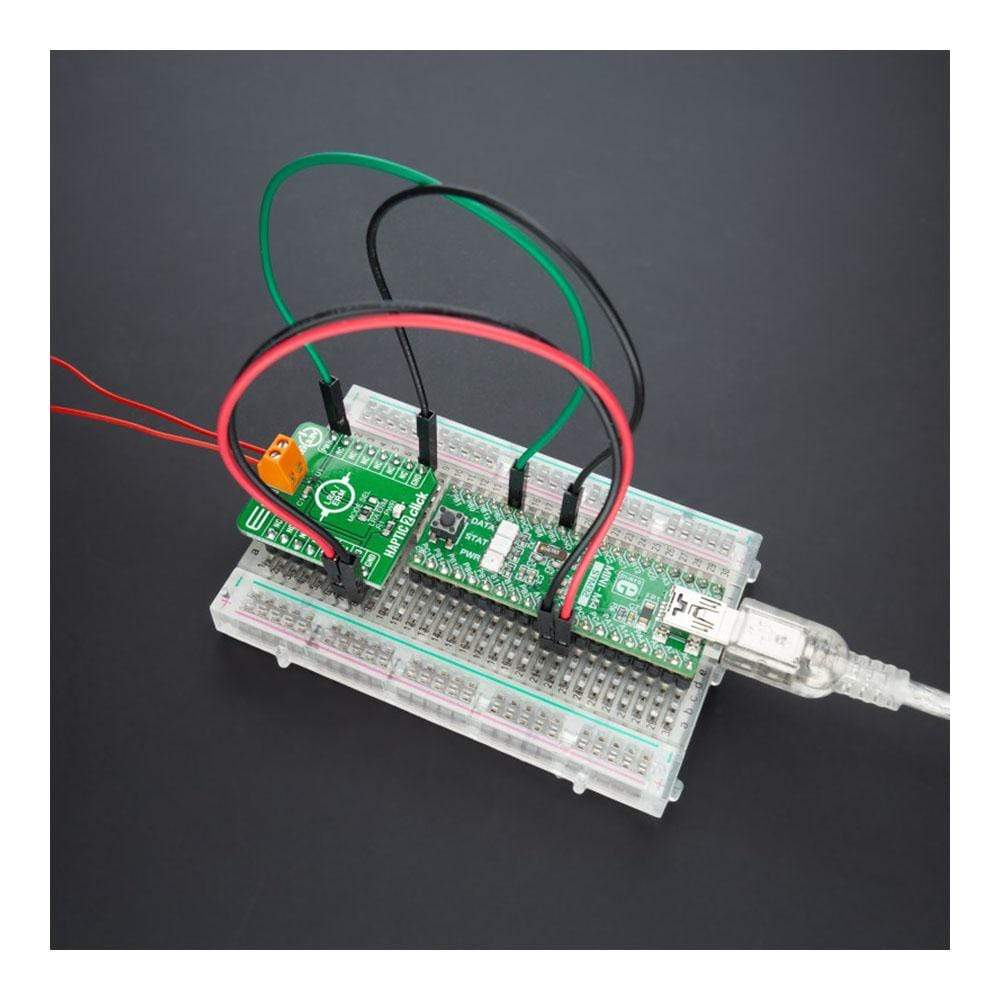
The Haptic 2 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Der Haptic 2 Click Board™ ist eine kompakte Zusatzplatine mit einem linearen Vibrationstreiber. Diese Platine verfügt über den LC898302AXA, einen Motortreiber speziell für LRA- und ERM-Anwendungen von ON Semiconductor. Gesteuert über nur einen Pin ermöglicht es dank automatischer Brems- und Übersteuerungsfunktion eine klare Vibration und ignoriert die Abweichung der Resonanzfrequenz dank der automatischen Abstimmungsfunktion. Die ursprüngliche Antriebswellenform ermöglicht es Ihnen, den Stromverbrauch zu senken, und ist hilfreich, die Batterielebensdauer zu verlängern. Dieses Click Board™ ist für zahlreiche alltägliche Anwendungen geeignet, wie z. B. Anzeigesysteme, Spielkonsolen, Trainingsgeräte/Simulatoren mit Haptikfunktion, Robotik und Mechatronik und vieles mehr.
Das Haptic 2 Click Board™ wird durch eine mikroSDK-kompatible Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ ist ein gründlich getestetes Produkt und kann auf einem System verwendet werden, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4452
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.017 kg
|
| Other | |
EAN |
8606027382062
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.