







Mikroelektronika d.o.o.
Bürstenloses 9-Click-Board
Bürstenloses 9-Click-Board
SKU: MIKROE-4387
Verfügbarkeit für Abholungen konnte nicht geladen werden
Overview
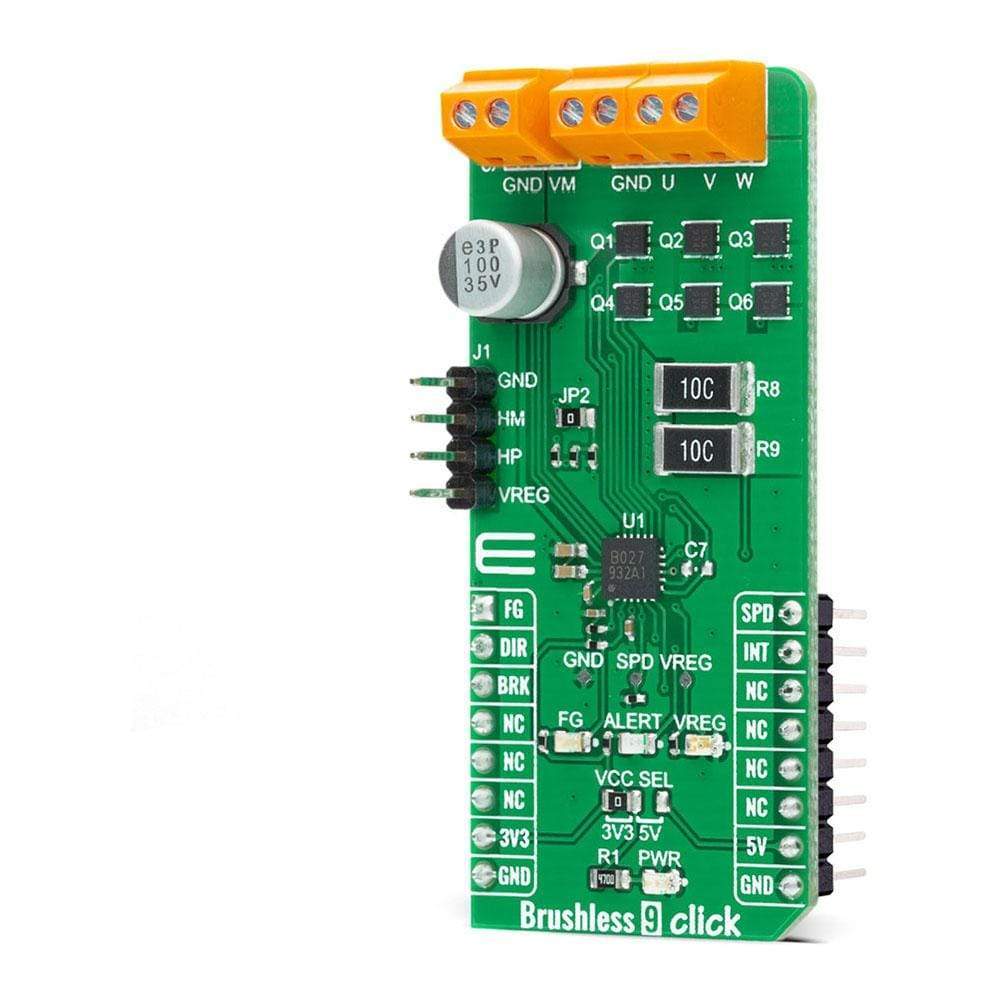
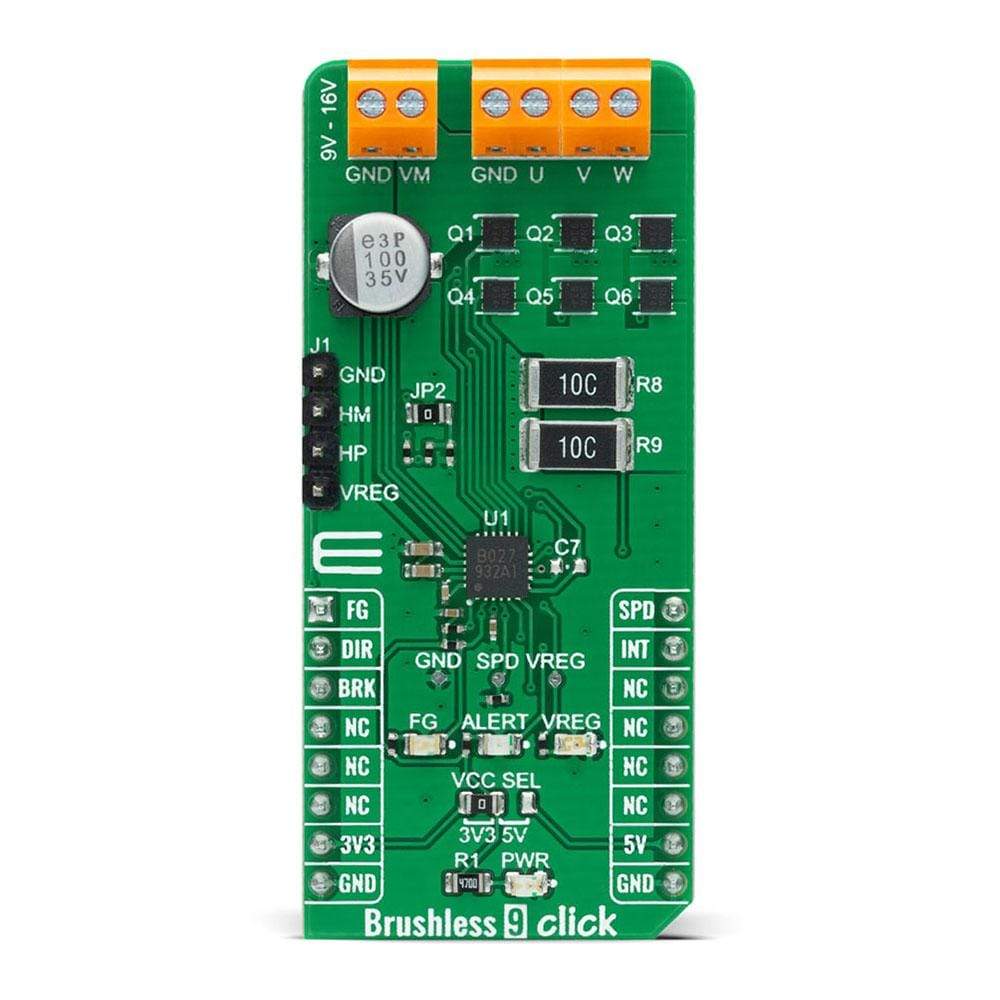
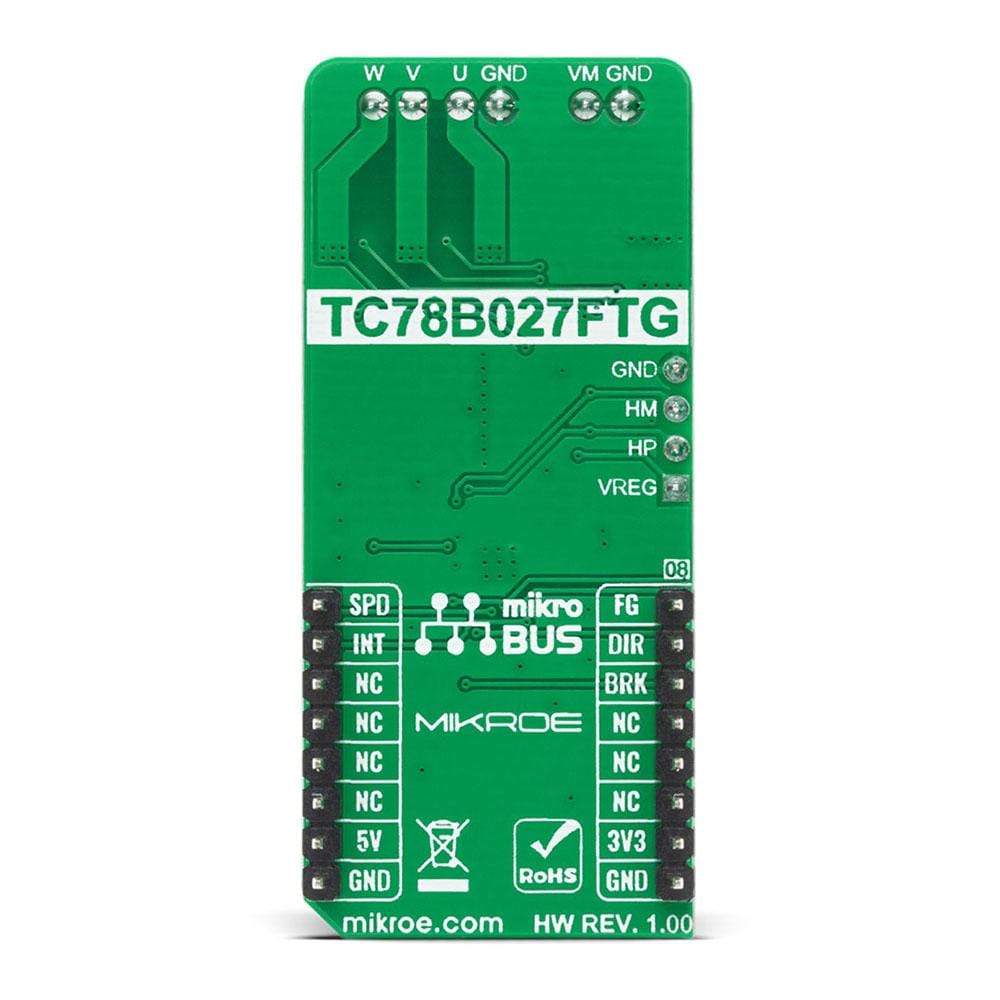
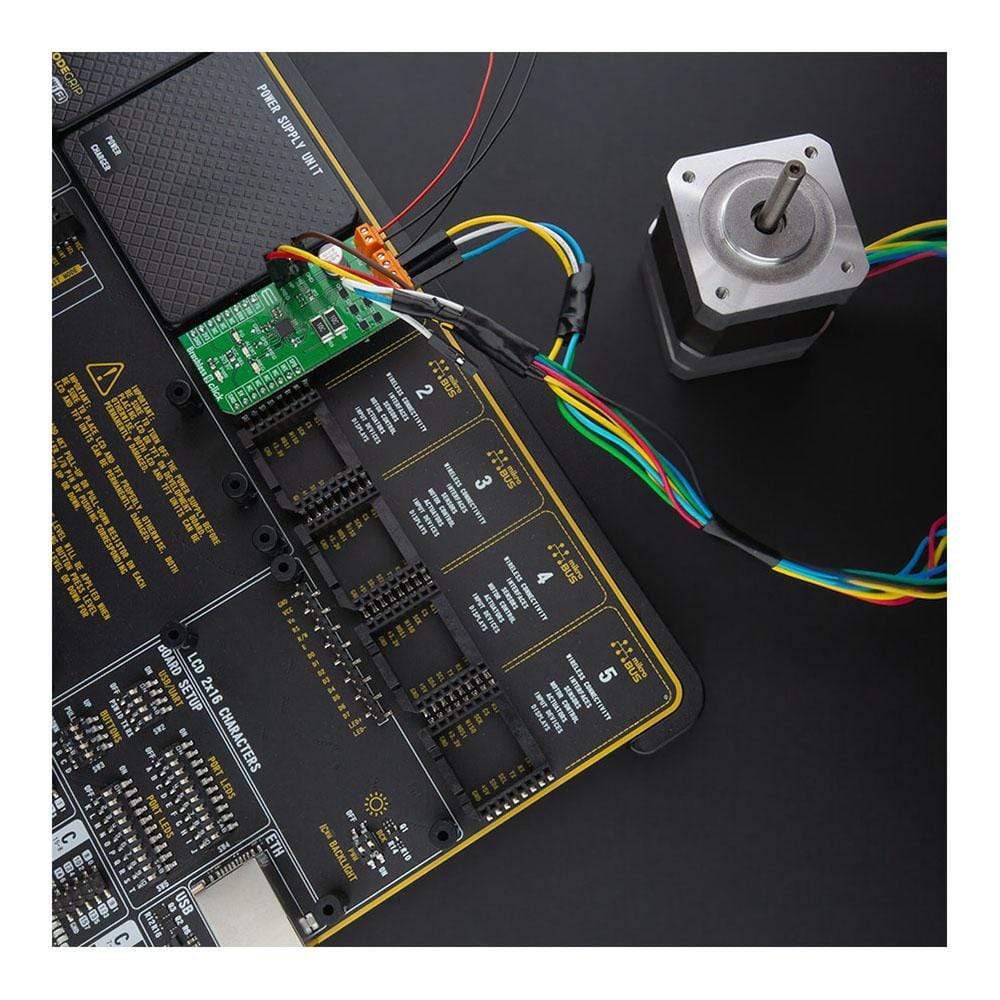
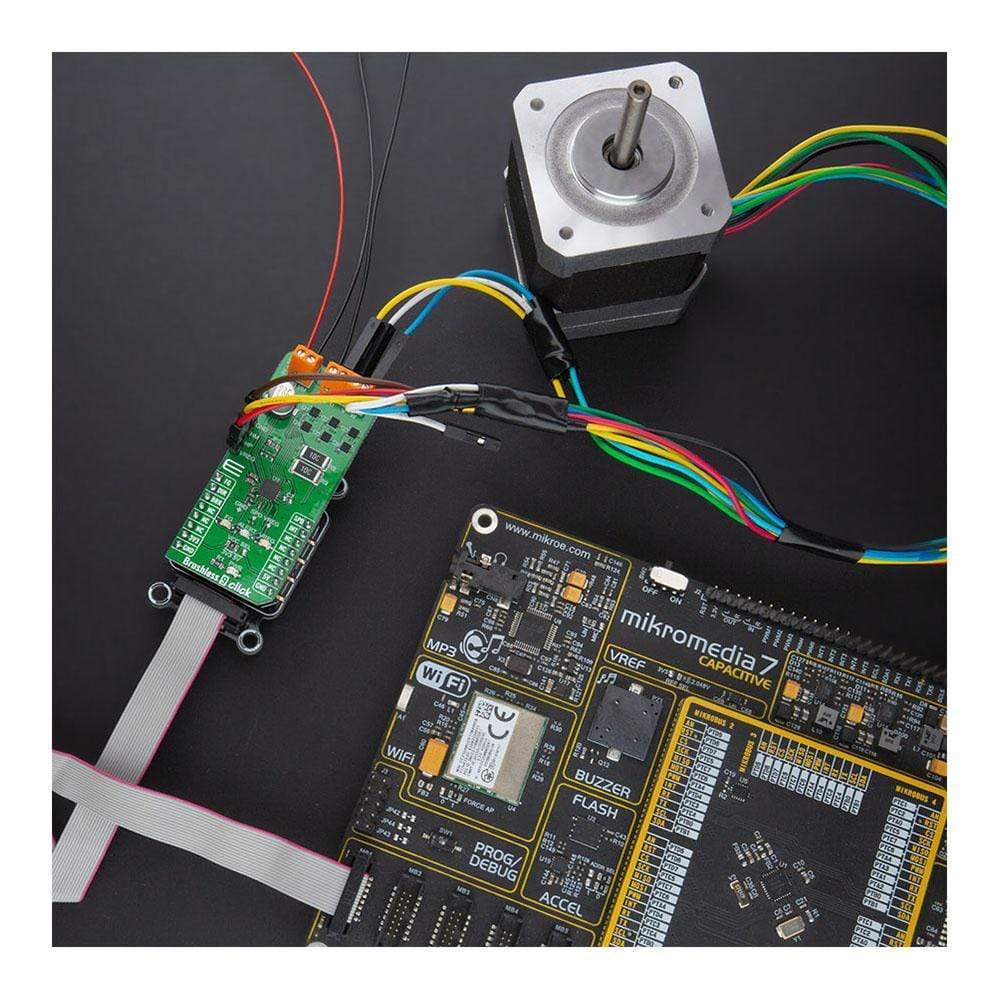
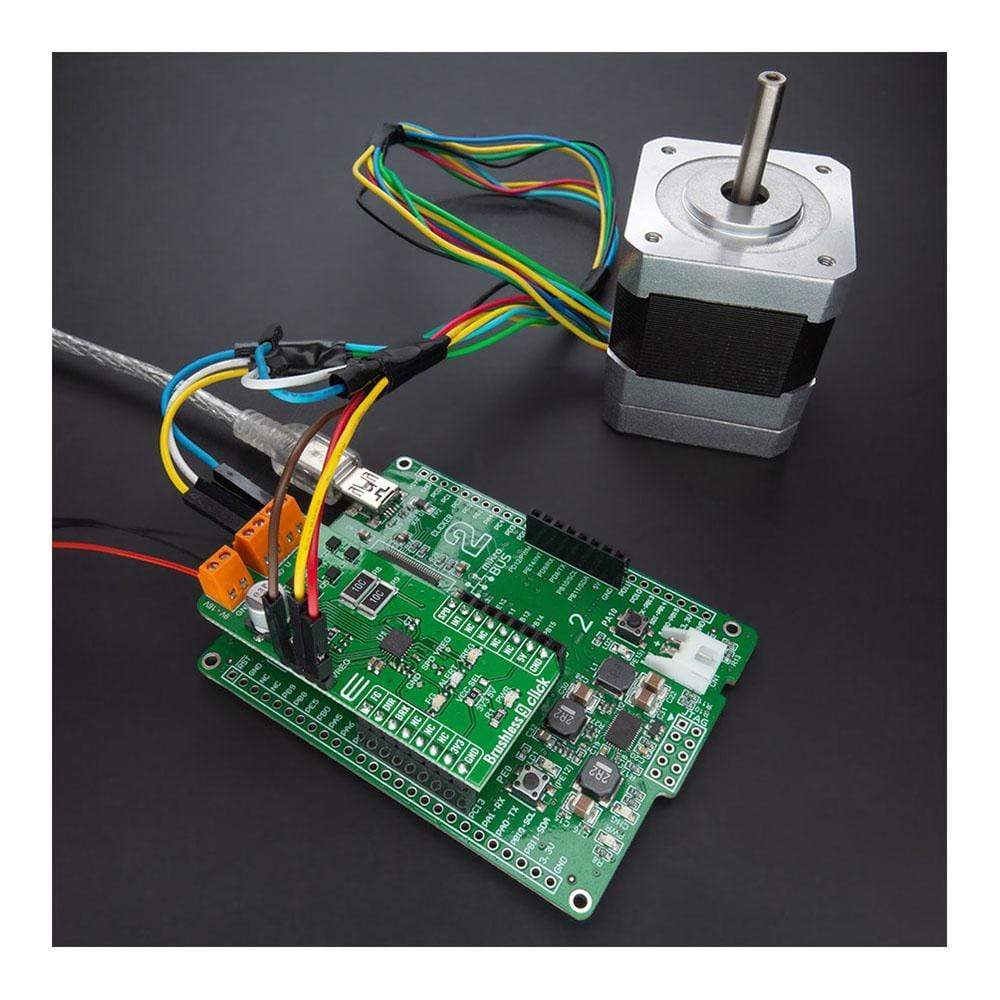
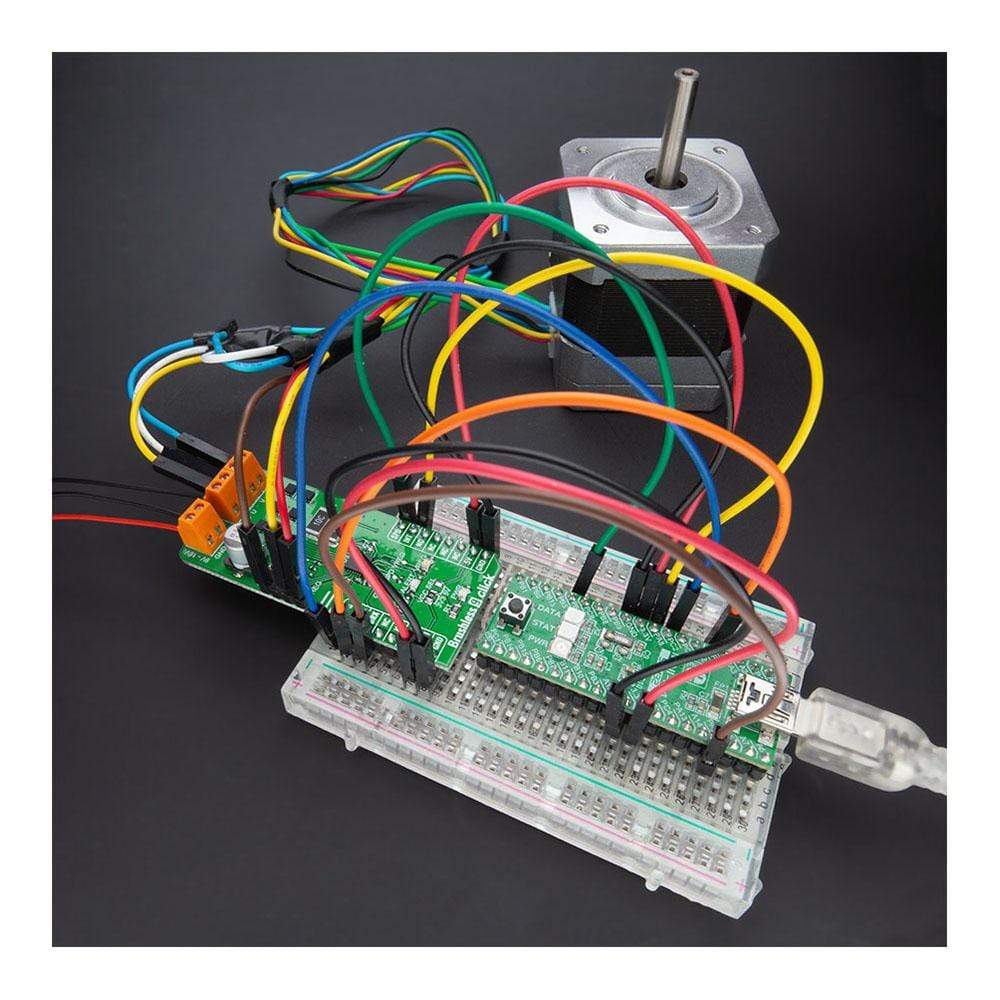
The Brushless 9 Click Board™ is a compact add-on board that controls BLDC motors with any MCU. This board features the TC78B027FTG, a 1-Hall sine-wave PWM controller for three-phase brushless DC motors from Toshiba Semiconductor. It simplifies the motor selection by using only one Hall sensor input that can be used with either a single Hall sensor motor or the more conventional 3 Hall sensor motors. Besides, it offers energy-saving and quiet motor operation, incorporating non-volatile memory and a closed-loop speed control function. This Click Board™ provides optimum operating efficiency in applications such as high-velocity server fans, blowers, and pumps.
The Brushless 9 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das Brushless 9 Click Board™ ist eine kompakte Zusatzplatine, die BLDC-Motoren mit jedem MCU steuert. Diese Platine verfügt über den TC78B027FTG, einen 1-Hall-Sinus-PWM-Controller für dreiphasige bürstenlose Gleichstrommotoren von Toshiba Semiconductor. Es vereinfacht die Motorauswahl durch die Verwendung von nur einem Hall-Sensor-Eingang, der entweder mit einem einzelnen Hall-Sensor-Motor oder den konventionelleren 3 Hall-Sensor-Motoren verwendet werden kann. Darüber hinaus bietet es einen energiesparenden und leisen Motorbetrieb, der einen nichtflüchtigen Speicher und eine Drehzahlregelungsfunktion mit geschlossenem Regelkreis umfasst. Dieses Click Board™ bietet optimale Betriebseffizienz in Anwendungen wie Hochgeschwindigkeits-Serverlüftern, Gebläsen und Pumpen.
Das Brushless 9 Click Board™ wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4387
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.022 kg
|
| Other | |
EAN |
8606027381478
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.