







Mikroelektronika d.o.o.
Gleichstrommotor 16 Click-Platine
Gleichstrommotor 16 Click-Platine
SKU: MIKROE-4333
Verfügbarkeit für Abholungen konnte nicht geladen werden

Overview
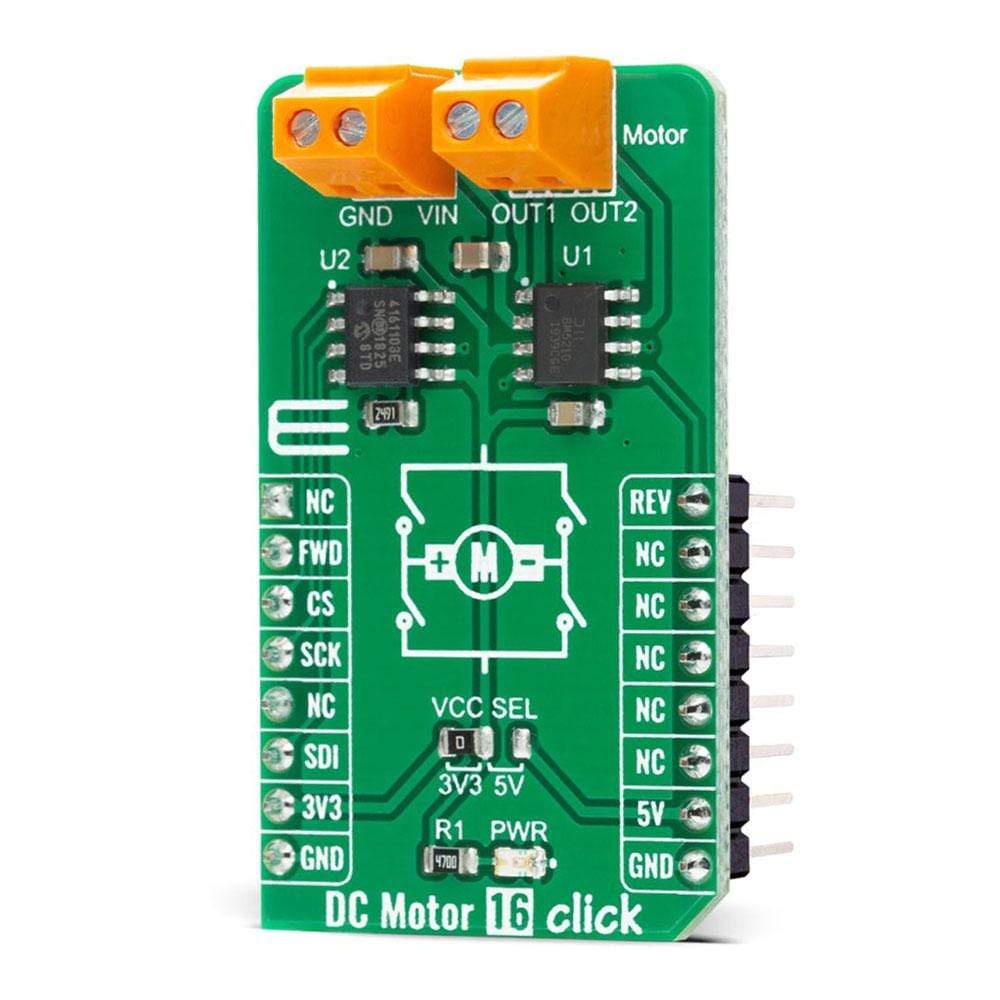
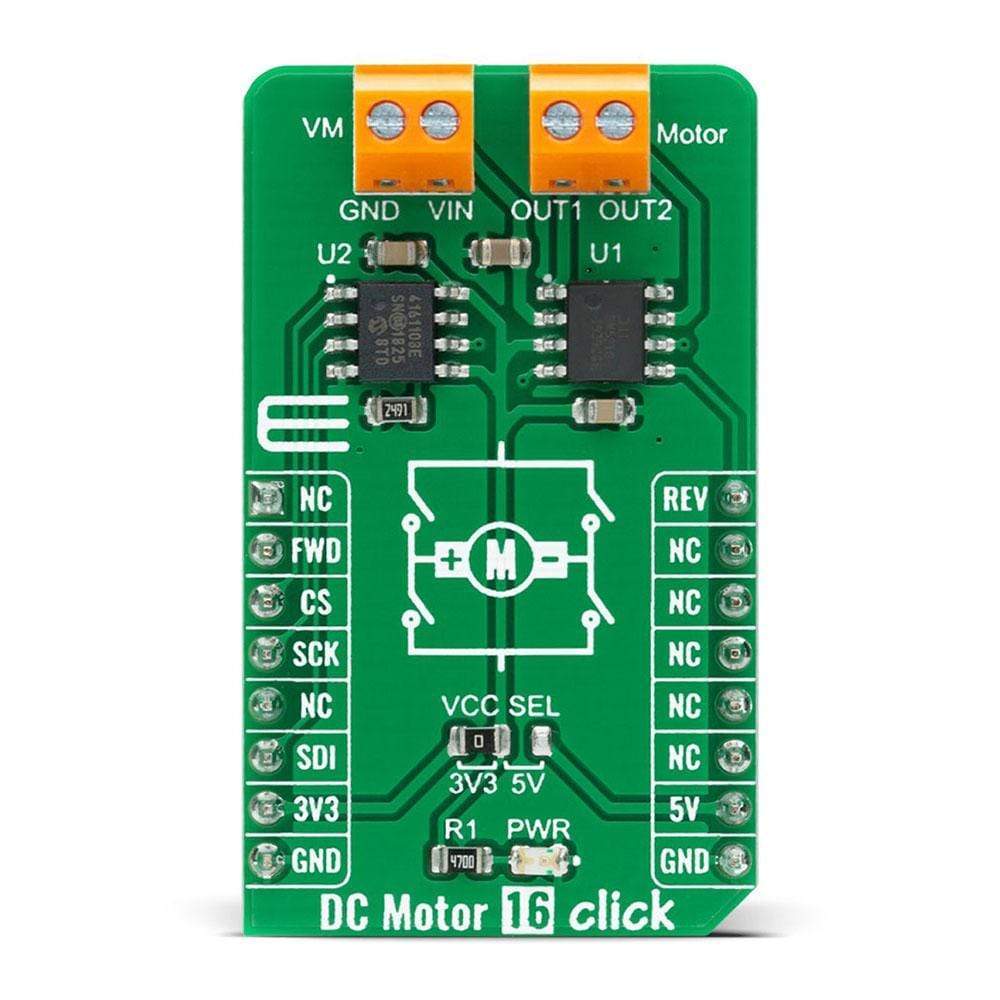
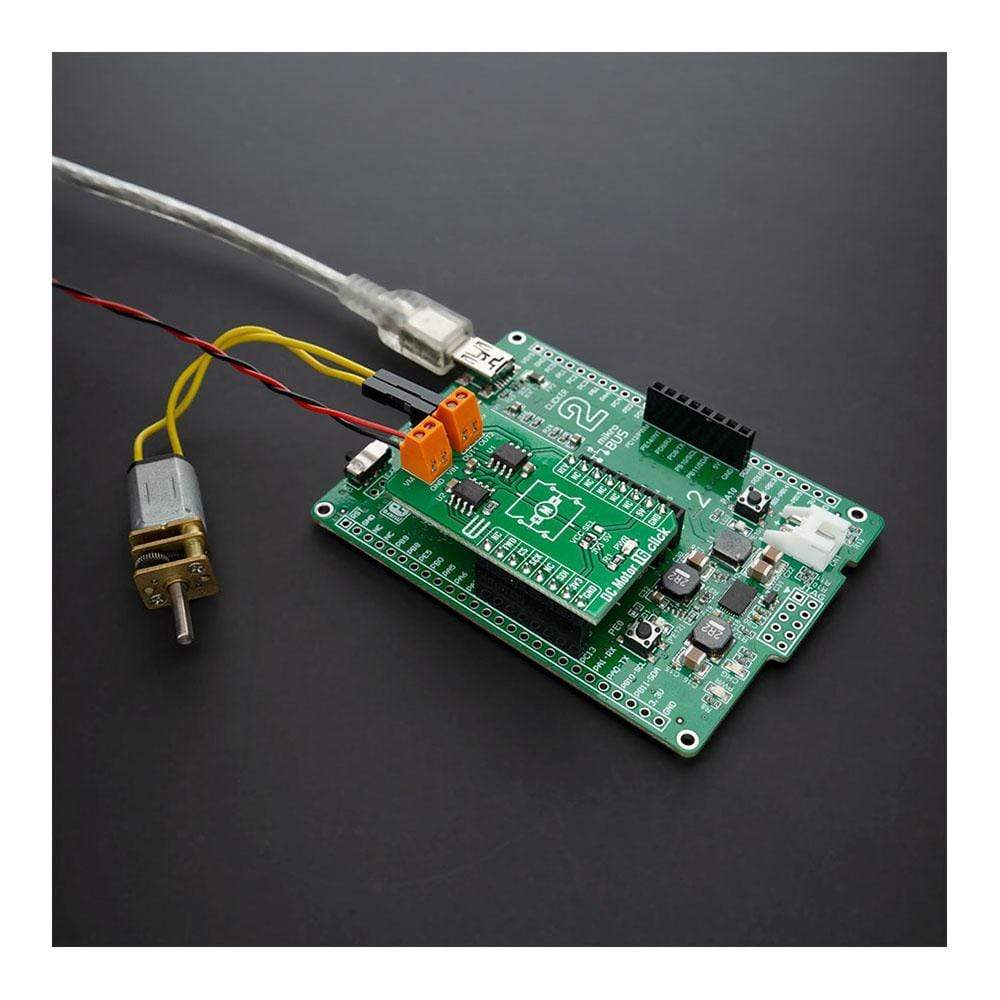
The DC Motor 16 Click Board™ is a compact add-on board that contains a high-performance single phase reversible DC motor drive with speed control. This board features the ZXBM5210, a fully-featured DC motor drive solution with an average current capability of up to 700mA from Diodes Incorporated. The ZXBM5210 has several modes of operations selected by two GPIO pins, has a wide supply voltage range from 3V to 18V, and has low power consumption. It possesses three speed-control modes, and provides under/over voltage protection, over current limit, and thermal shutdown capability. This Click Board™ is suitable for a reversible DC motor and actuator drive, remote control motorized toy applications, home appliances, handheld power tools, and many more.
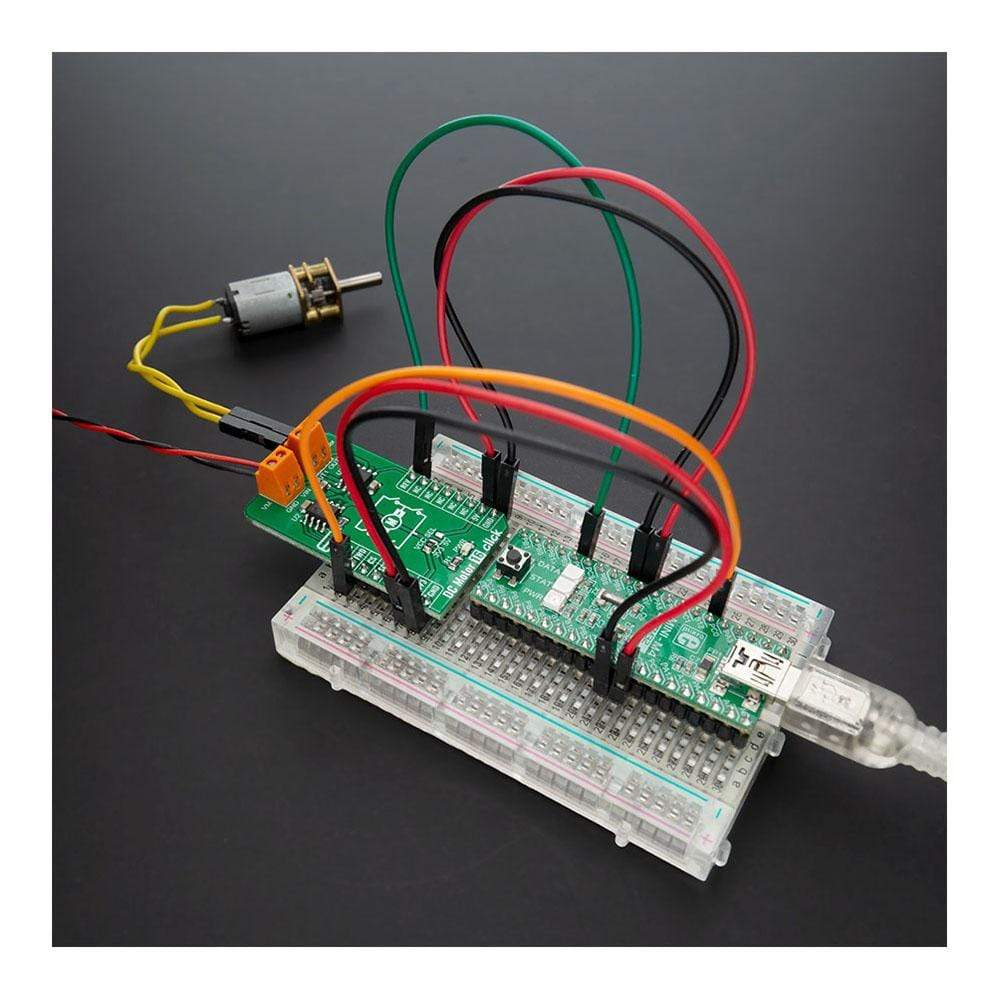
The DC Motor 16 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das DC Motor 16 Click Board™ ist eine kompakte Zusatzplatine, die einen leistungsstarken einphasigen, umkehrbaren Gleichstrommotorantrieb mit Drehzahlregelung enthält. Diese Platine verfügt über den ZXBM5210, eine voll ausgestattete Gleichstrommotorantriebslösung mit einer durchschnittlichen Strombelastbarkeit von bis zu 700 mA von Diodes Incorporated. Der ZXBM5210 verfügt über mehrere Betriebsmodi, die über zwei GPIO-Pins ausgewählt werden, hat einen großen Versorgungsspannungsbereich von 3 V bis 18 V und einen geringen Stromverbrauch. Er verfügt über drei Drehzahlregelungsmodi und bietet Unter-/Überspannungsschutz, Überstrombegrenzung und thermische Abschaltung. Dieses Click Board™ eignet sich für einen umkehrbaren Gleichstrommotor- und Aktuatorantrieb, ferngesteuerte motorisierte Spielzeuganwendungen, Haushaltsgeräte, tragbare Elektrowerkzeuge und vieles mehr.
Das DC Motor 16 Click Board™ wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4333
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027380716
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.