







Mikroelektronika d.o.o.
CAN FD 5 Click-Platine
CAN FD 5 Click-Platine
SKU: MIKROE-4286
Verfügbarkeit für Abholungen konnte nicht geladen werden




Overview
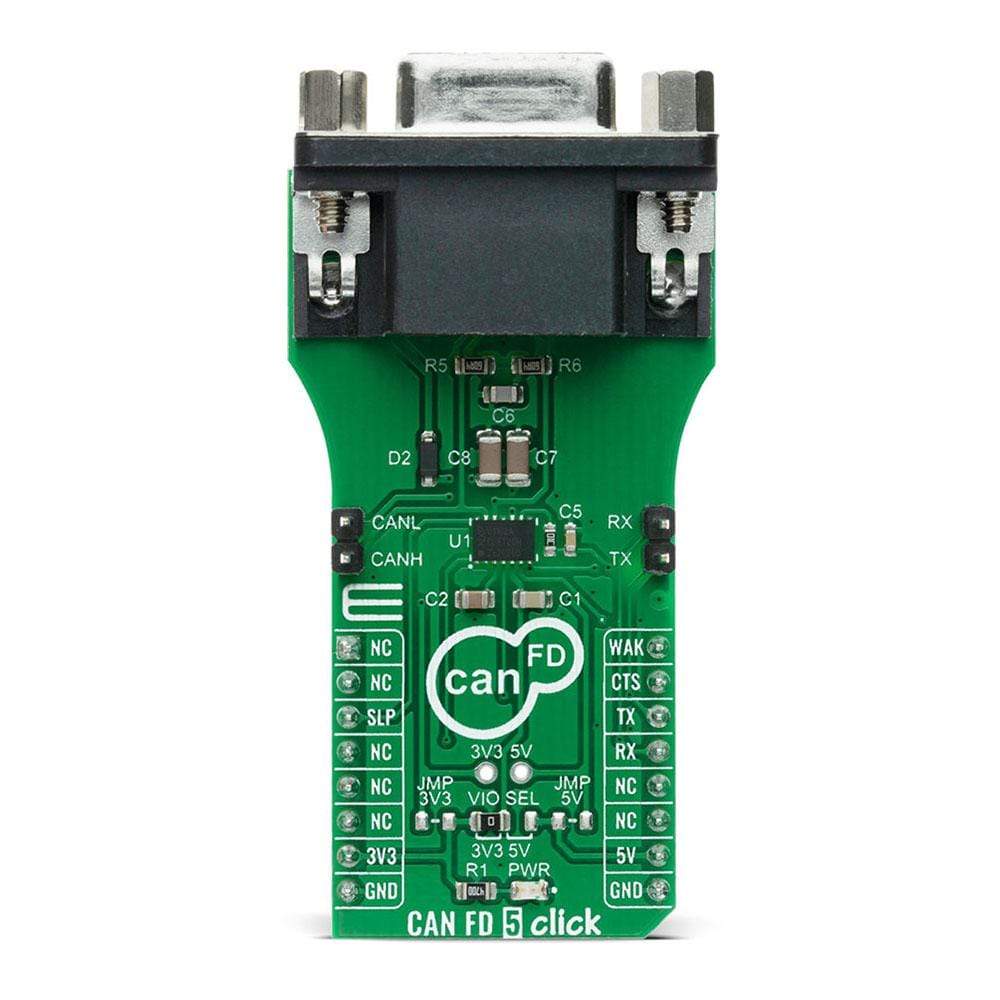
The CAN FD 5 Click Board™ is a compact add-on board that contains a high-speed CAN transceiver that supports both CAN and CAN FD protocol types. This board features the UJA1162A, a ‘self-supplied high-speed CAN transceiver integrating an ISO 11898-2:2016 and SAE J2284-1 to SAE J2284-5 compliant CAN transceiver with Sleep Mode from NXP Semiconductors. It supports many additional features like under-voltage detection, mode control via a single GPIO pin, remote and local wake-up capability, overtemperature shutdown, and a very low quiescent current in Sleep mode. This Click Board™ is suitable for HS CAN networks in automotive applications and networks in industrial applications, in electric power steering (EPS), HVAC climate control, tire pressure monitoring system (TPMS), and many more.
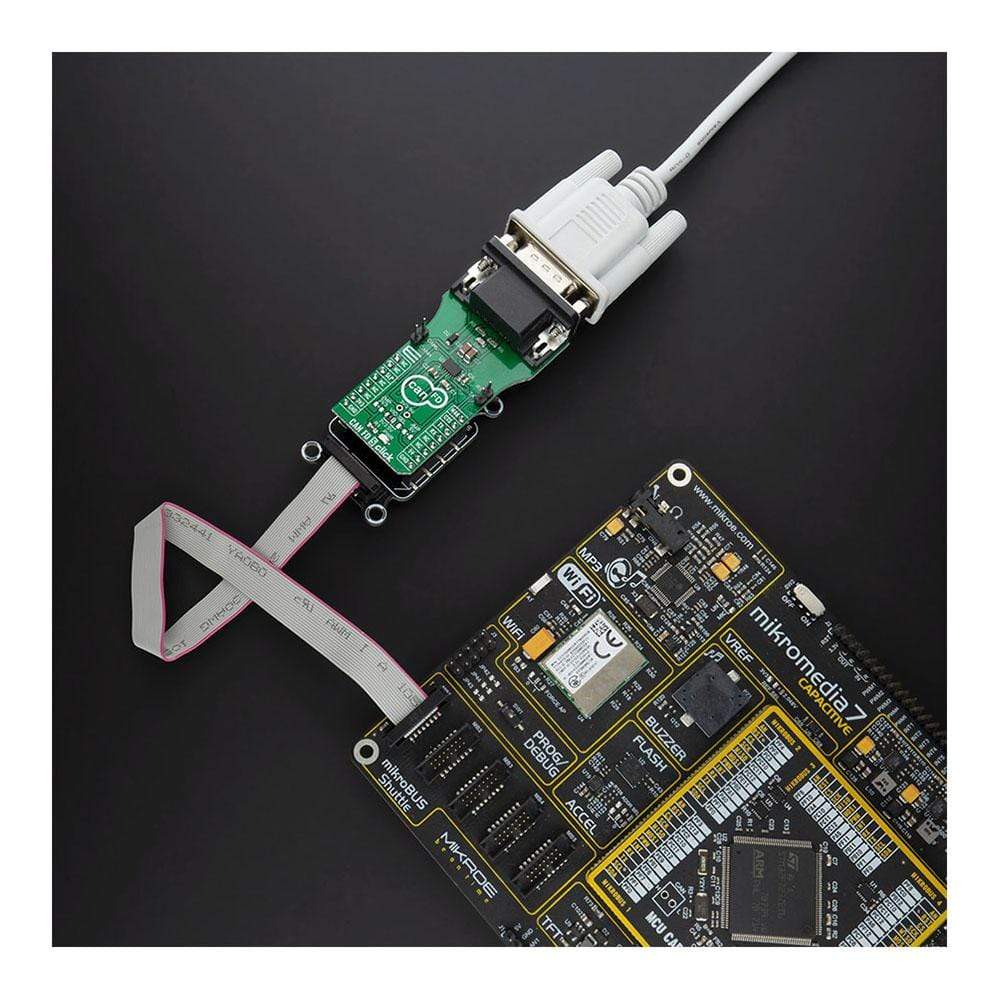
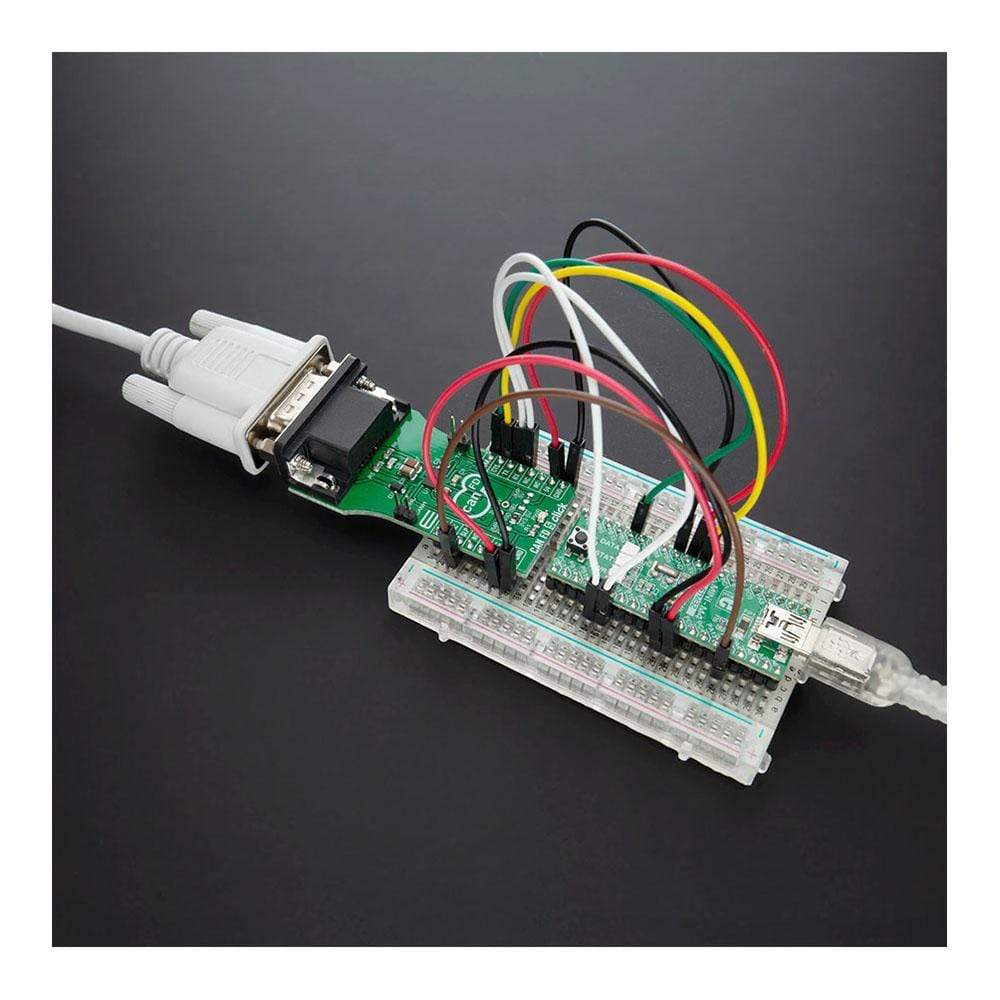
The CAN FD 5 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das CAN FD 5 Click Board™ ist eine kompakte Zusatzplatine, die einen Hochgeschwindigkeits-CAN-Transceiver enthält, der sowohl CAN- als auch CAN FD-Protokolltypen unterstützt. Diese Platine verfügt über den UJA1162A, einen selbstversorgenden Hochgeschwindigkeits-CAN-Transceiver, der einen ISO 11898-2:2016- und SAE J2284-1- bis SAE J2284-5-kompatiblen CAN-Transceiver mit Ruhemodus von NXP Semiconductors integriert. Es unterstützt viele zusätzliche Funktionen wie Unterspannungserkennung, Modussteuerung über einen einzelnen GPIO-Pin, Remote- und lokale Aktivierungsfunktion, Übertemperaturabschaltung und einen sehr niedrigen Ruhestrom im Ruhemodus. Dieses Click Board™ eignet sich für HS-CAN-Netzwerke in Automobilanwendungen und Netzwerken in industriellen Anwendungen, in elektrischer Servolenkung (EPS), HVAC-Klimaautomatik, Reifendrucküberwachungssystem (TPMS) und vielem mehr.
Das CAN FD 5 Click Board™ wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4286
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.033 kg
|
| Other | |
EAN |
8606027380648
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.