







Mikroelektronika d.o.o.
6DOF IMU 14 Click-Platine
6DOF IMU 14 Click-Platine
SKU: MIKROE-4237
Verfügbarkeit für Abholungen konnte nicht geladen werden




Overview
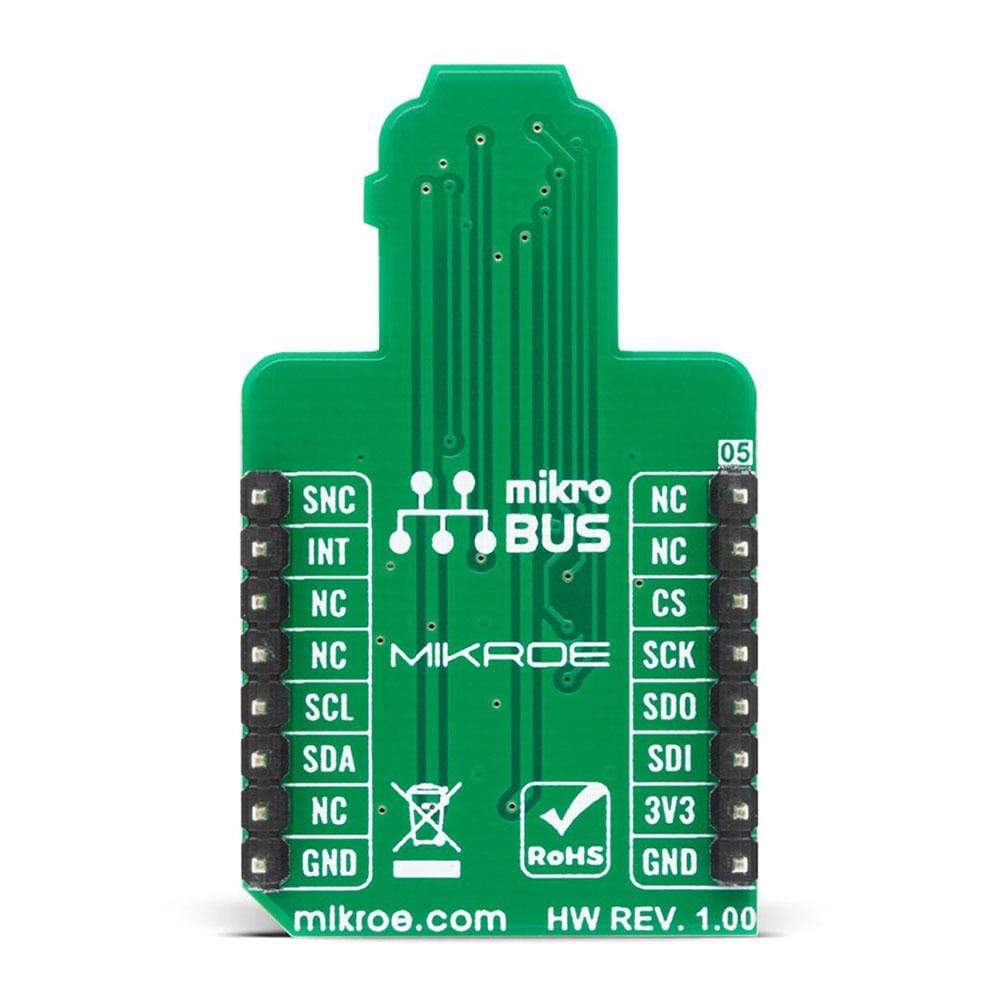
The 6DOF IMU 14 Click Board™ is a compact add-on board that contains a 6-axis MEMS motion tracking device combining a 3-axis gyroscope and a 3-axis accelerometer. This board features the ICM-42688-P, high precision 6-axis MEMS motion tracking device, from TDK InvenSense. It has a configurable host interface that supports both I2C and SPI serial communication, features a 2 kB FIFO and 2 programmable interrupts with ultra-low-power Wake-on-Motion support to minimize system power consumption. This Click Board™ is an excellent choice for applications like gesture recognition, activity classification, and pedometer, along with programmable digital filters, and an embedded temperature sensor.
The 6DOF IMU 14 Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das 6DOF IMU 14 Click Board™ ist eine kompakte Zusatzplatine, die ein 6-Achsen-MEMS-Bewegungsverfolgungsgerät enthält, das ein 3-Achsen-Gyroskop und einen 3-Achsen-Beschleunigungsmesser kombiniert. Diese Platine verfügt über das hochpräzise 6-Achsen-MEMS-Bewegungsverfolgungsgerät ICM-42688-P von TDK InvenSense. Es verfügt über eine konfigurierbare Hostschnittstelle, die sowohl I2C- als auch SPI-Seriellkommunikation unterstützt, verfügt über ein 2-kB-FIFO und 2 programmierbare Interrupts mit extrem energiesparender Wake-on-Motion-Unterstützung zur Minimierung des Stromverbrauchs des Systems. Dieses Click Board™ ist eine ausgezeichnete Wahl für Anwendungen wie Gestenerkennung, Aktivitätsklassifizierung und Schrittzähler sowie programmierbare digitale Filter und einen eingebetteten Temperatursensor.
Das 6DOF IMU 14 Click wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4237
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606027380273
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.