



Mikroelektronika d.o.o.
M-Bus Slave Click-Platine
M-Bus Slave Click-Platine
SKU: MIKROE-4137
Verfügbarkeit für Abholungen konnte nicht geladen werden

Overview
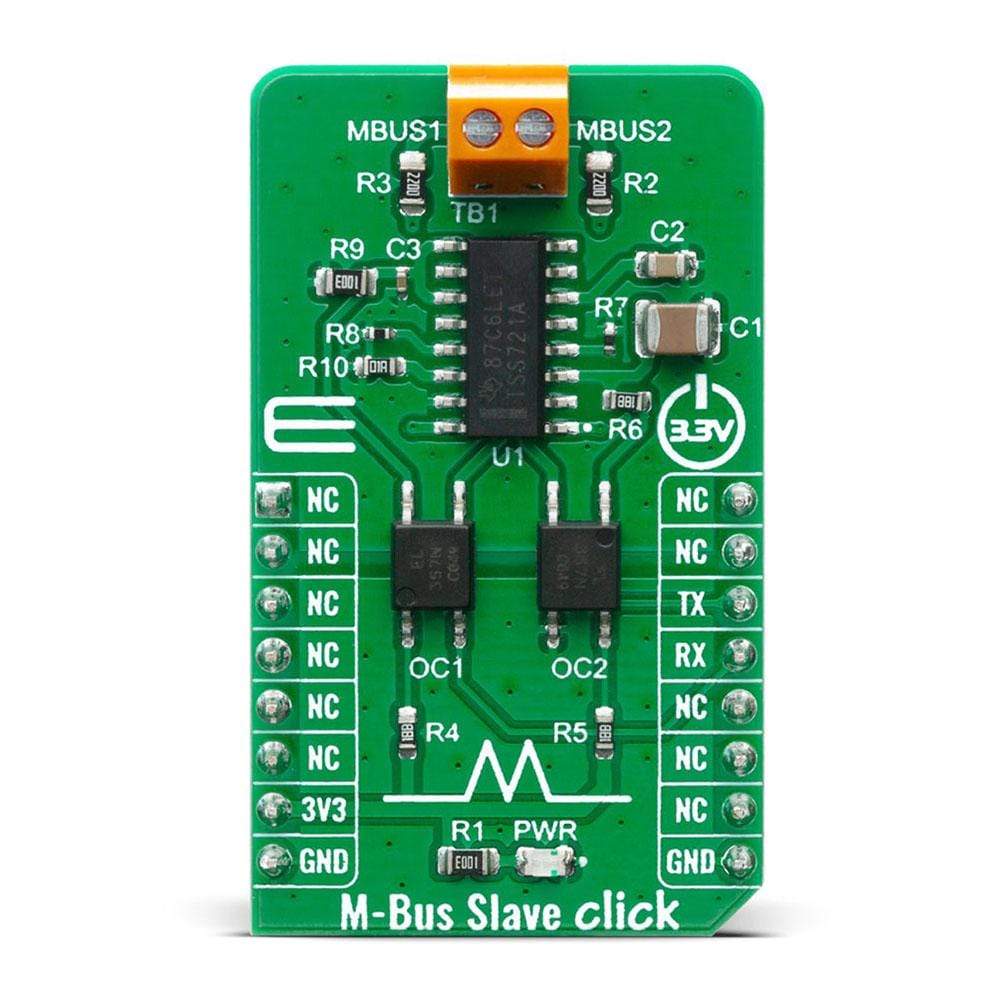
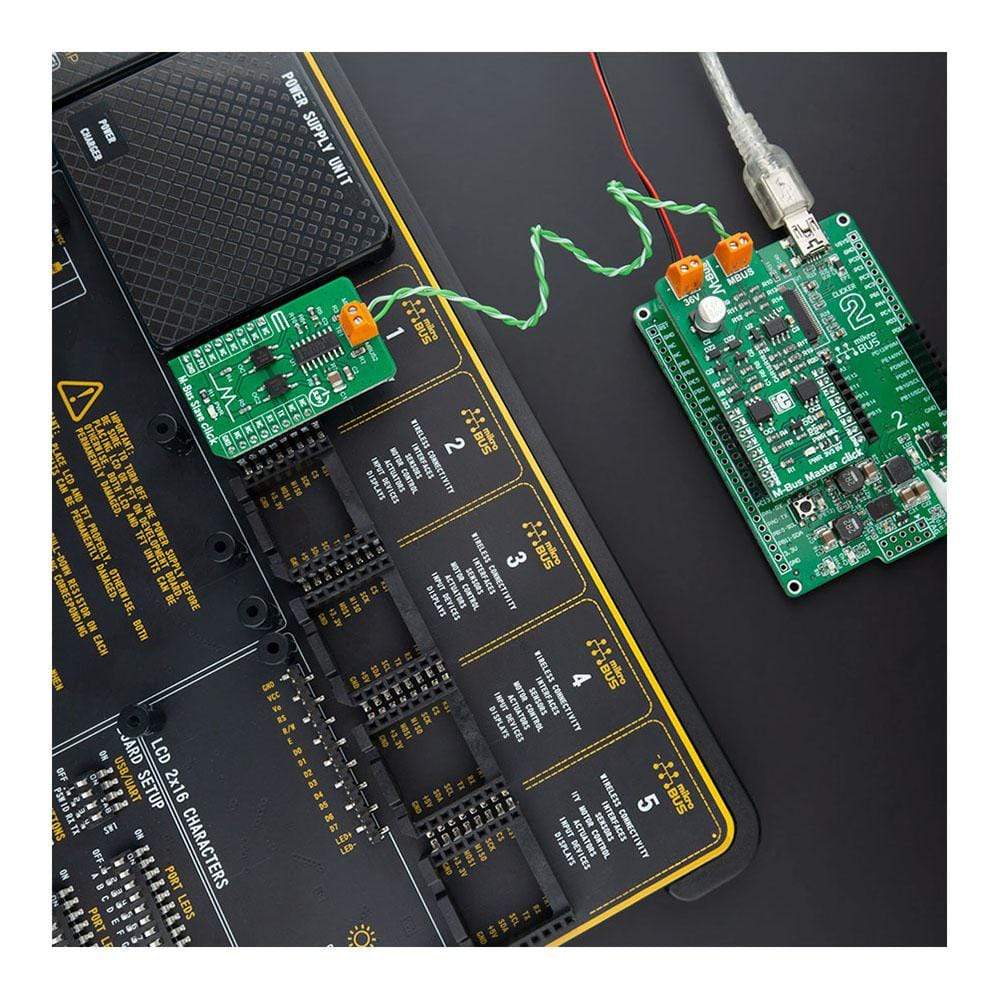
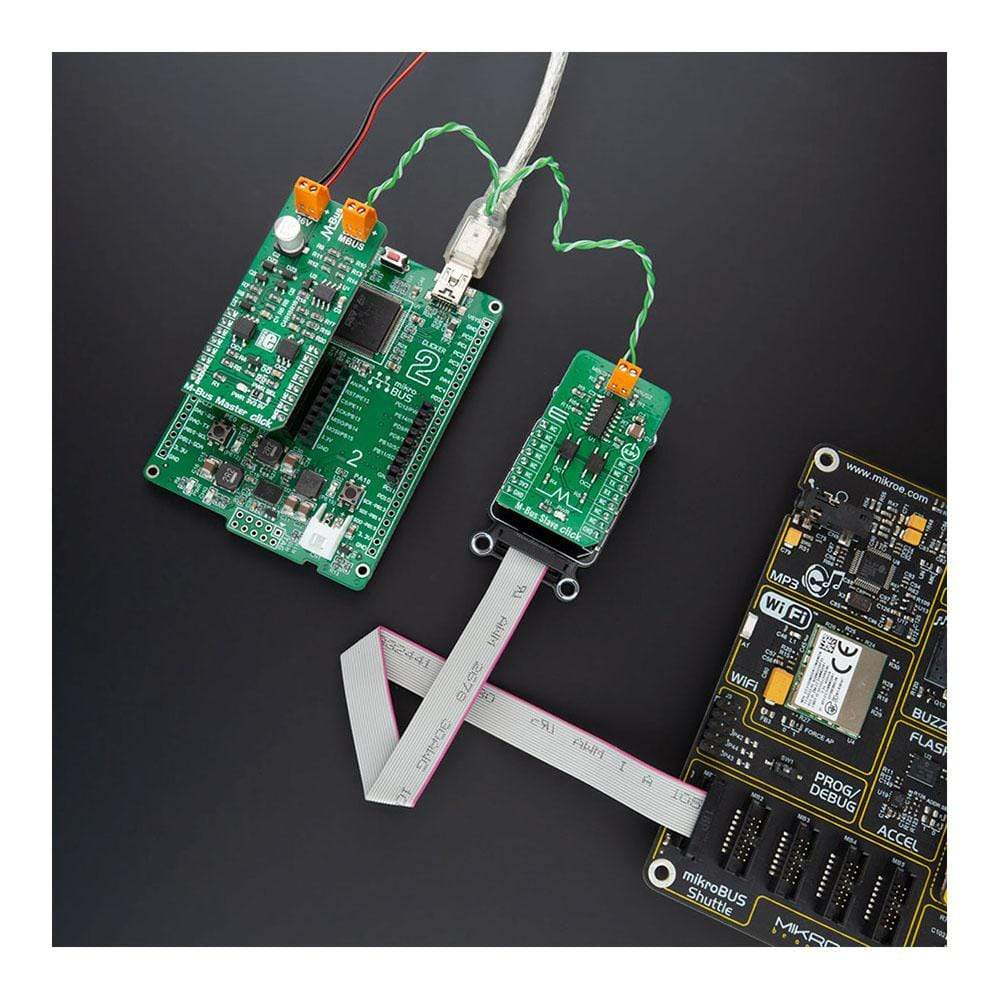
The M-Bus Slave Click Board™ is equipped with the TSS721A, a single chip transceiver developed by Texas Instruments for Meter-Bus applications according to EN1434-3 standard. The connection to the bus is polarity independent and serves as a slave node in the system.
The M-Bus Slave Click Board™ has full galvanic isolation with optocouplers to improve the reliability of the whole circuit. The circuit is supplied by the master via the bus. Therefore, this circuit offers no additional load for the slave battery. The TSS721A has a power-fail function integrated within. This solution is perfect for a plethora of applications like remote reading of gas, water, heat or electricity, or other types of consumption meters.
Downloads
Das M-Bus Slave Click Board™ ist mit dem TSS721A ausgestattet, einem von Texas Instruments entwickelten Single-Chip-Transceiver für Meter-Bus-Anwendungen gemäß EN1434-3-Standard. Der Anschluss an den Bus ist polaritätsunabhängig und dient als Slave-Knoten im System.
Das M-Bus Slave Click Board™ verfügt über eine vollständige galvanische Trennung mit Optokopplern, um die Zuverlässigkeit des gesamten Schaltkreises zu verbessern. Der Schaltkreis wird vom Master über den Bus versorgt. Daher stellt dieser Schaltkreis keine zusätzliche Belastung für die Slave-Batterie dar. Das TSS721A verfügt über eine integrierte Stromausfallfunktion. Diese Lösung eignet sich perfekt für eine Vielzahl von Anwendungen wie die Fernablesung von Gas-, Wasser-, Wärme- oder Stromzählern oder anderen Arten von Verbrauchszählern.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4137
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018717767
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.