







Mikroelektronika d.o.o.
DC-Motor 6 Click-Platine
DC-Motor 6 Click-Platine
SKU: MIKROE-4114
Verfügbarkeit für Abholungen konnte nicht geladen werden




Overview
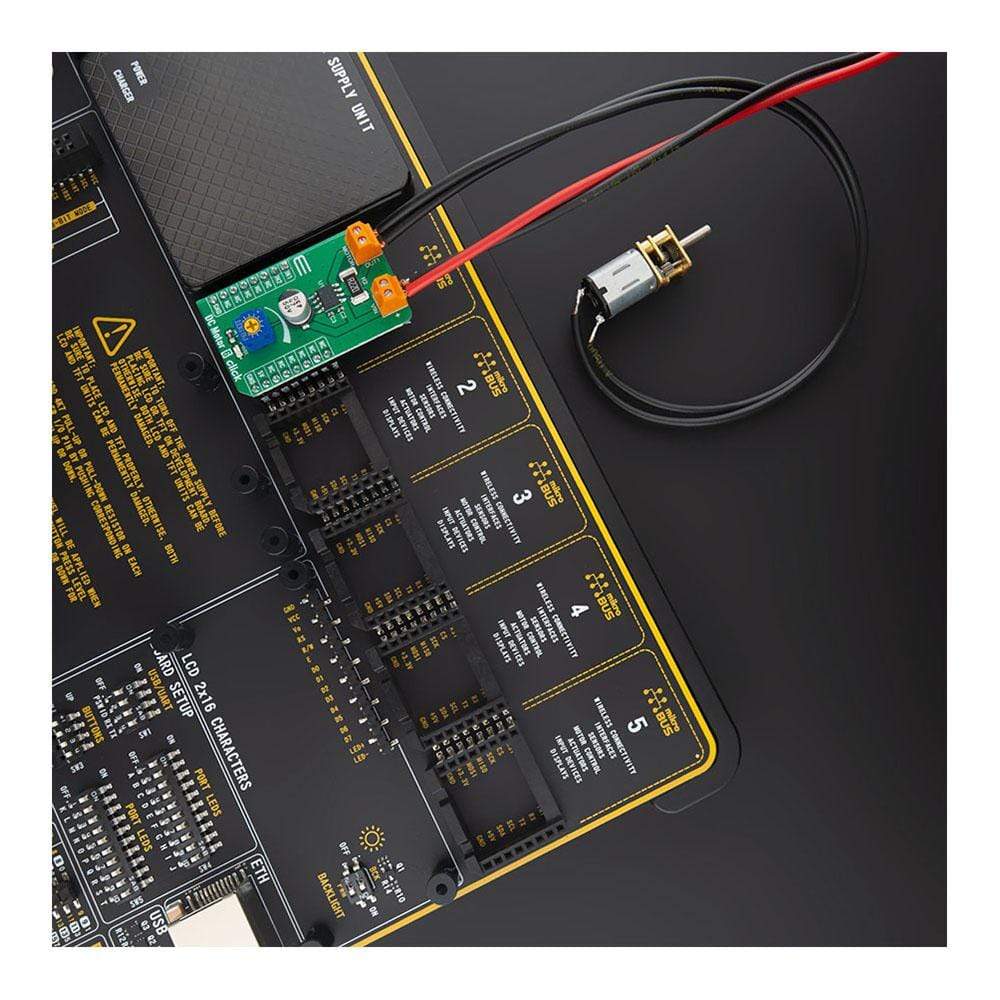
The DC Motor 6 Click Board™ is a PWM chopper type brushed DC motor driver, labelled as TB67H451FNG. This IC includes one channel of motor output block, using a wide range of supply voltages while delivering reasonably high current to the connected DC motors. Low ON-resistance MOSFETs and a PWM control help the TB67H451FNG exhibit lower heat generation thus efficient motor drive. Furthermore, the TB67H451FNG has two inputs, IN1 and IN2, which allow for the selection of the four operation modes; forward (clockwise), reverse (counter-clockwise), short break, and stop modes.
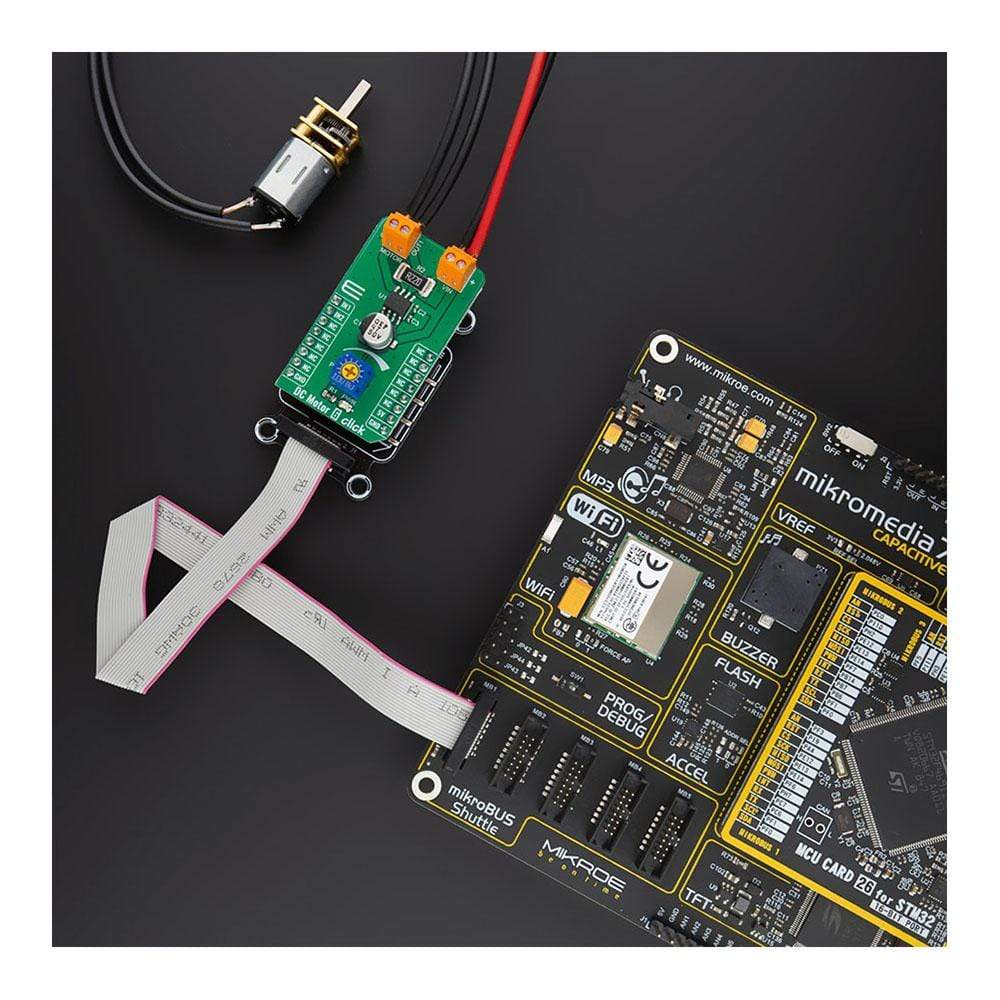
The DC Motor 6 Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das DC Motor 6 Click Board™ ist ein PWM-Chopper-Bürstenmotortreiber für Gleichstrommotoren mit der Bezeichnung TB67H451FNG. Dieser IC umfasst einen Kanal eines Motorausgangsblocks, der eine große Bandbreite an Versorgungsspannungen verwendet und gleichzeitig einen relativ hohen Strom an die angeschlossenen Gleichstrommotoren liefert. MOSFETs mit niedrigem Einschaltwiderstand und eine PWM-Steuerung tragen dazu bei, dass das TB67H451FNG eine geringere Wärmeentwicklung aufweist und somit einen effizienten Motorantrieb ermöglicht. Darüber hinaus verfügt das TB67H451FNG über zwei Eingänge, IN1 und IN2, die die Auswahl der vier Betriebsmodi ermöglichen: Vorwärts (im Uhrzeigersinn), Rückwärts (gegen den Uhrzeigersinn), kurze Pause und Stoppmodus.
Der DC Motor 6 Click wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4114
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606018717453
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.