


Mikroelektronika d.o.o.
GMR Angle Click-Platine
GMR Angle Click-Platine
SKU: MIKROE-3815
Verfügbarkeit für Abholungen konnte nicht geladen werden


Overview
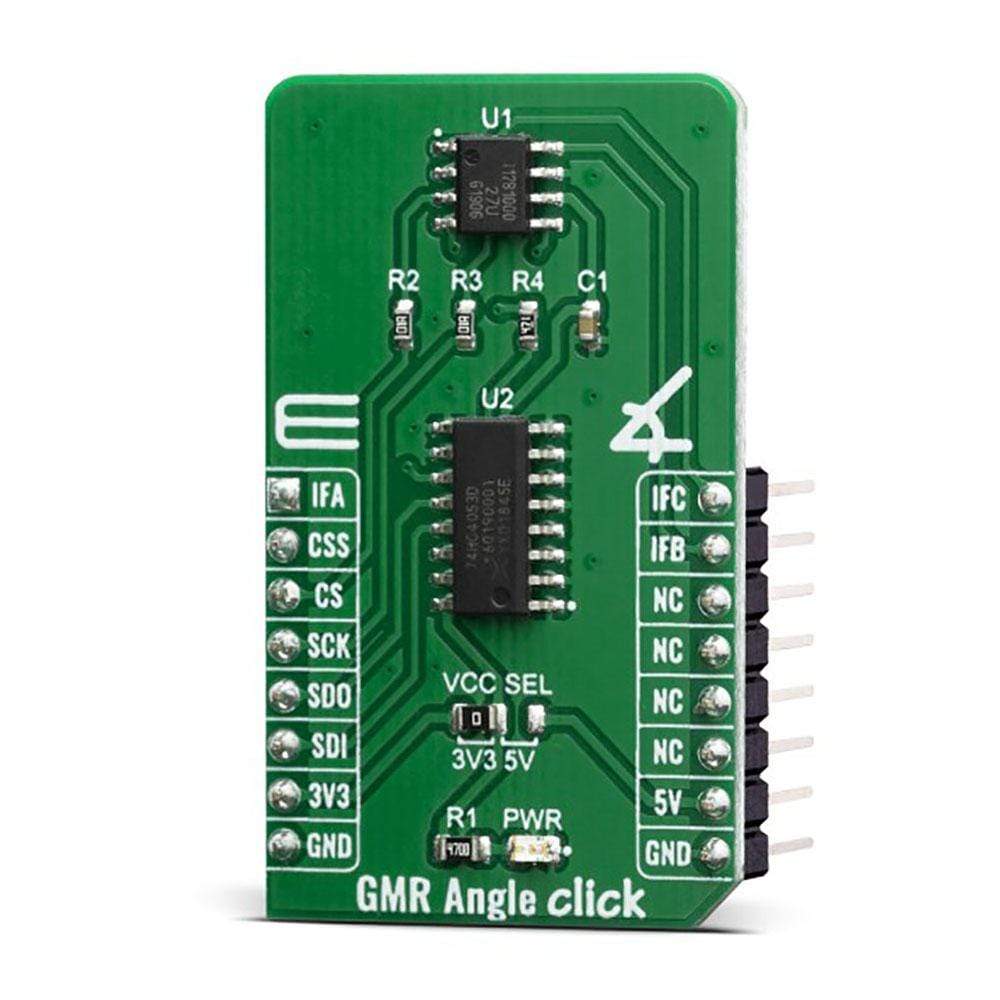
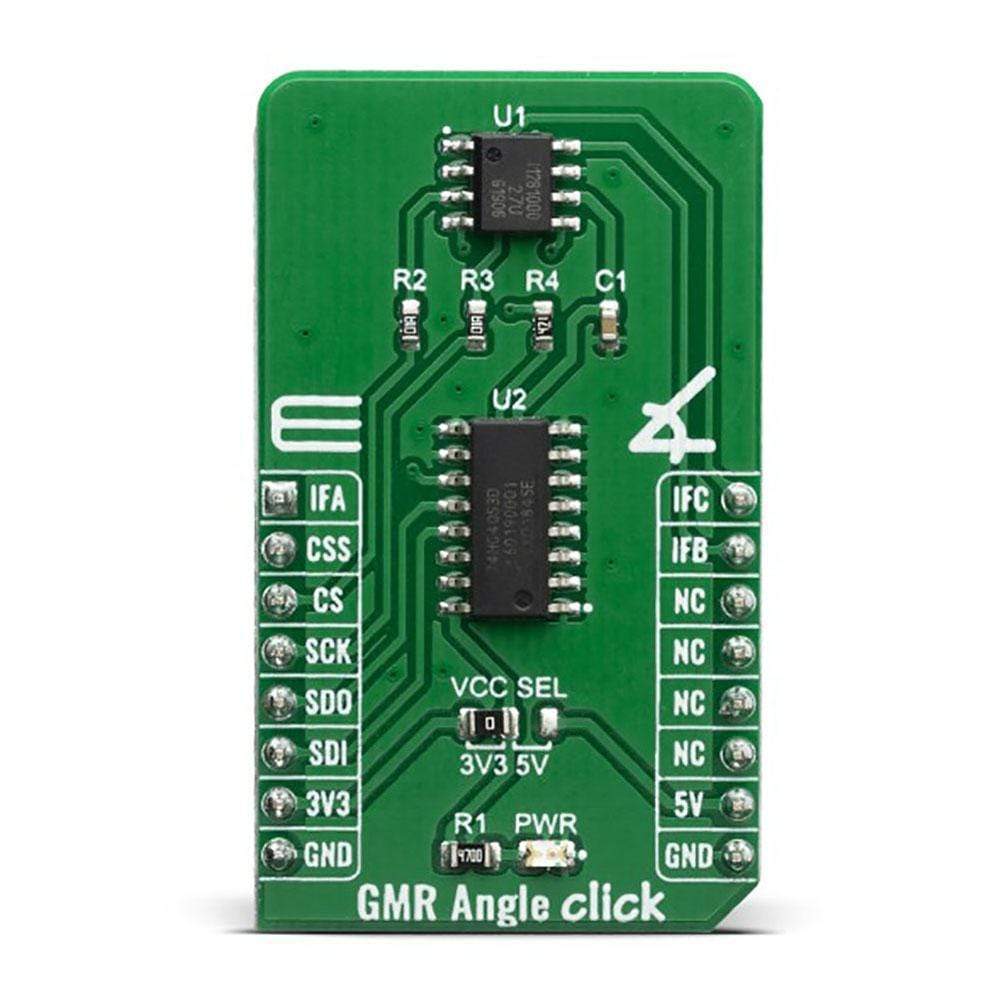
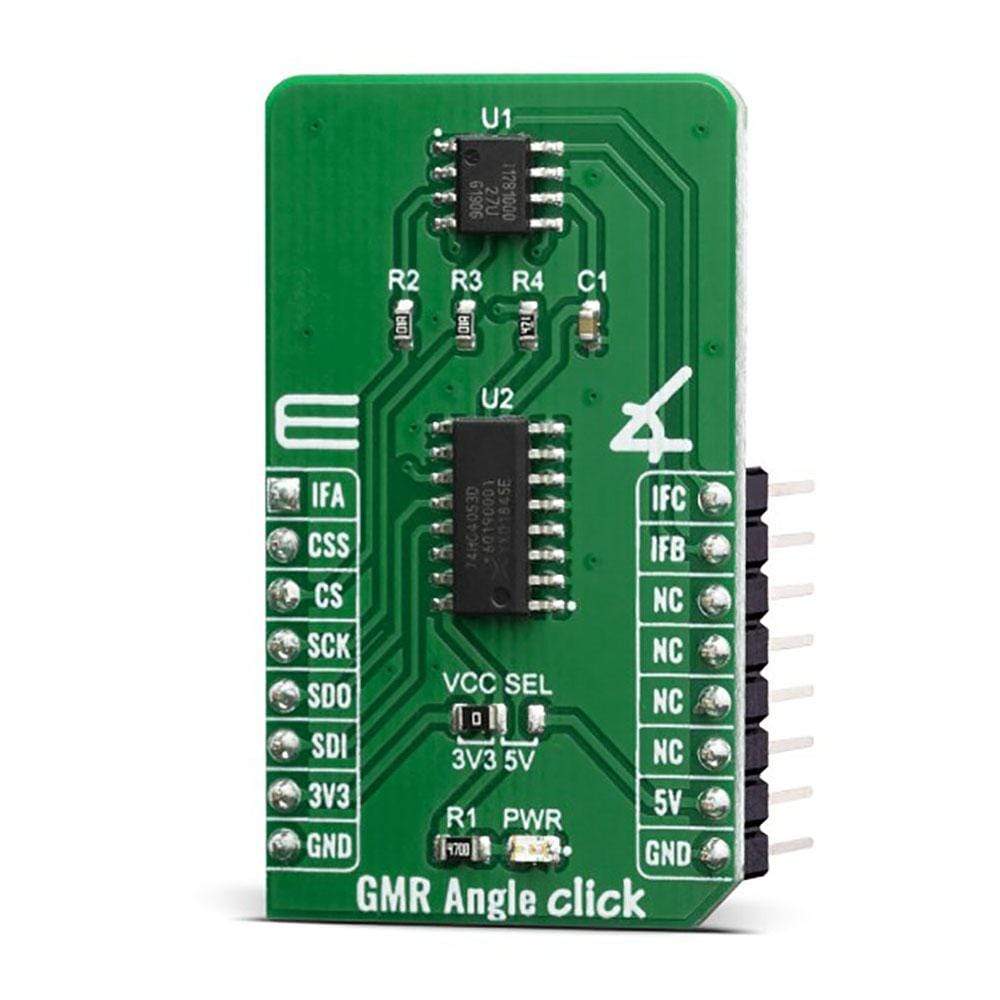
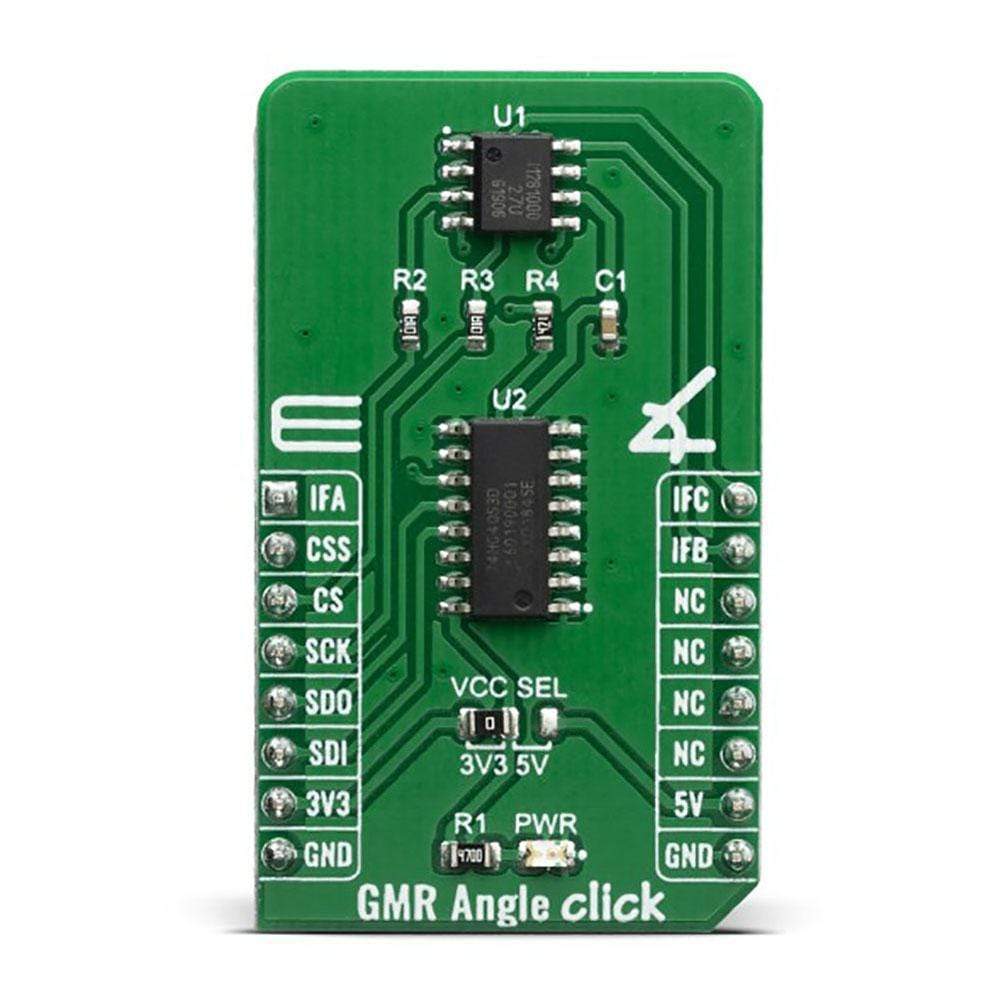
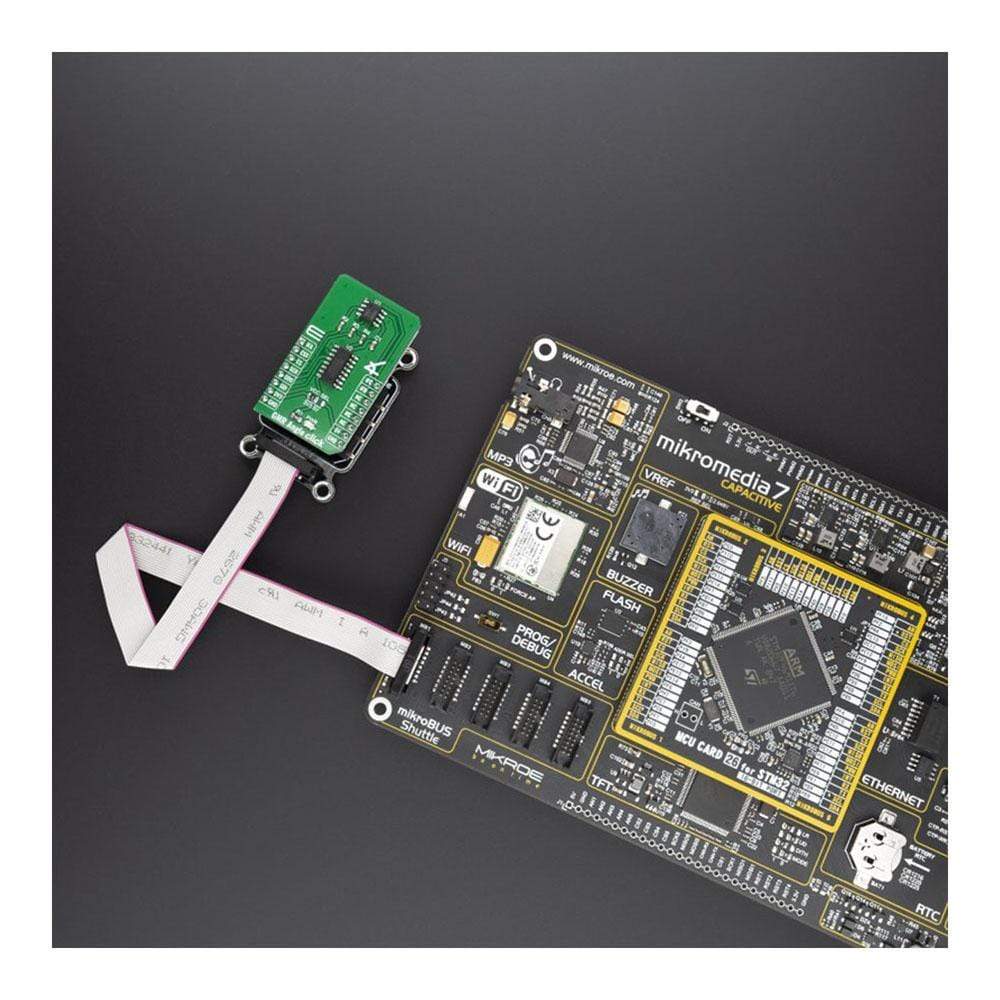
The GMR Angle Click Board™ features the TLI5012B E1000, which is a pre-calibrated 360° angle sensor that detects the orientation of a magnetic field, made by Infineon. The GMR Angle click is ideal for angular position sensing in industrial and consumer applications such as an electrically commutated motor (e.g. BLDC), fans or pumps.
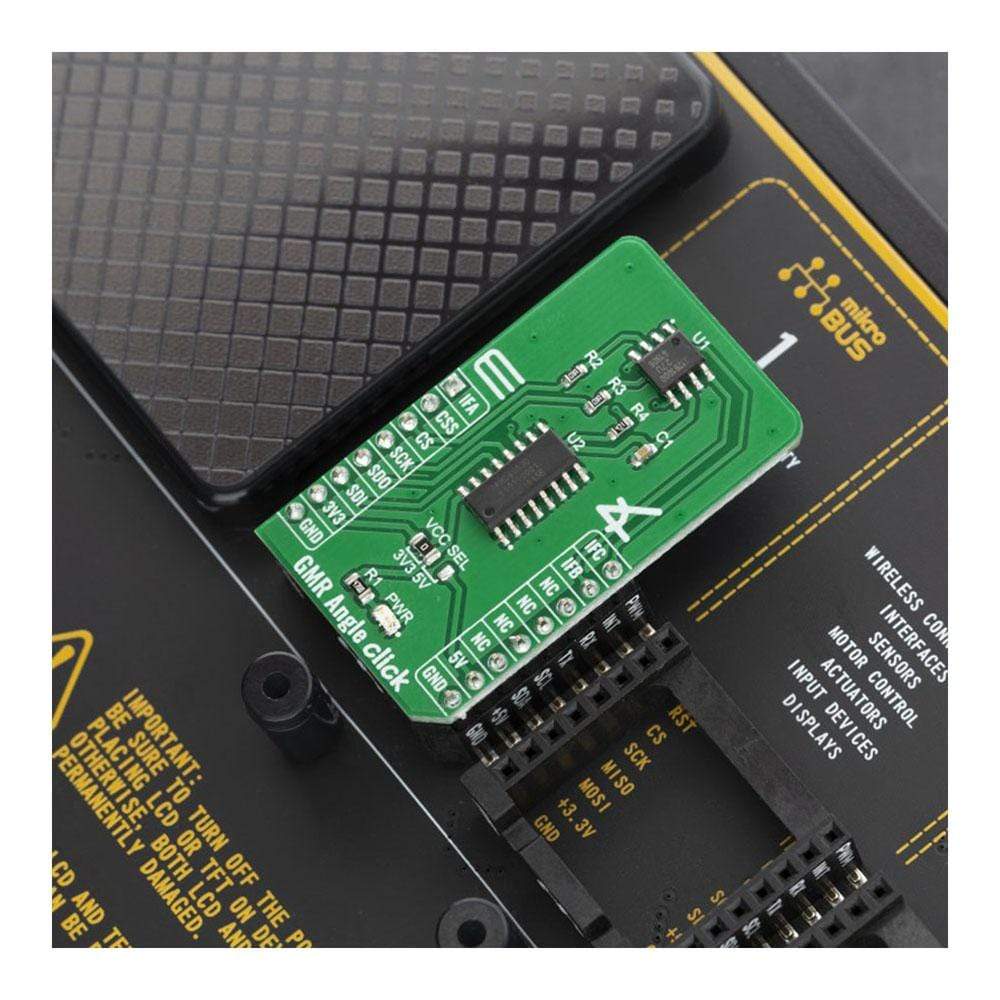
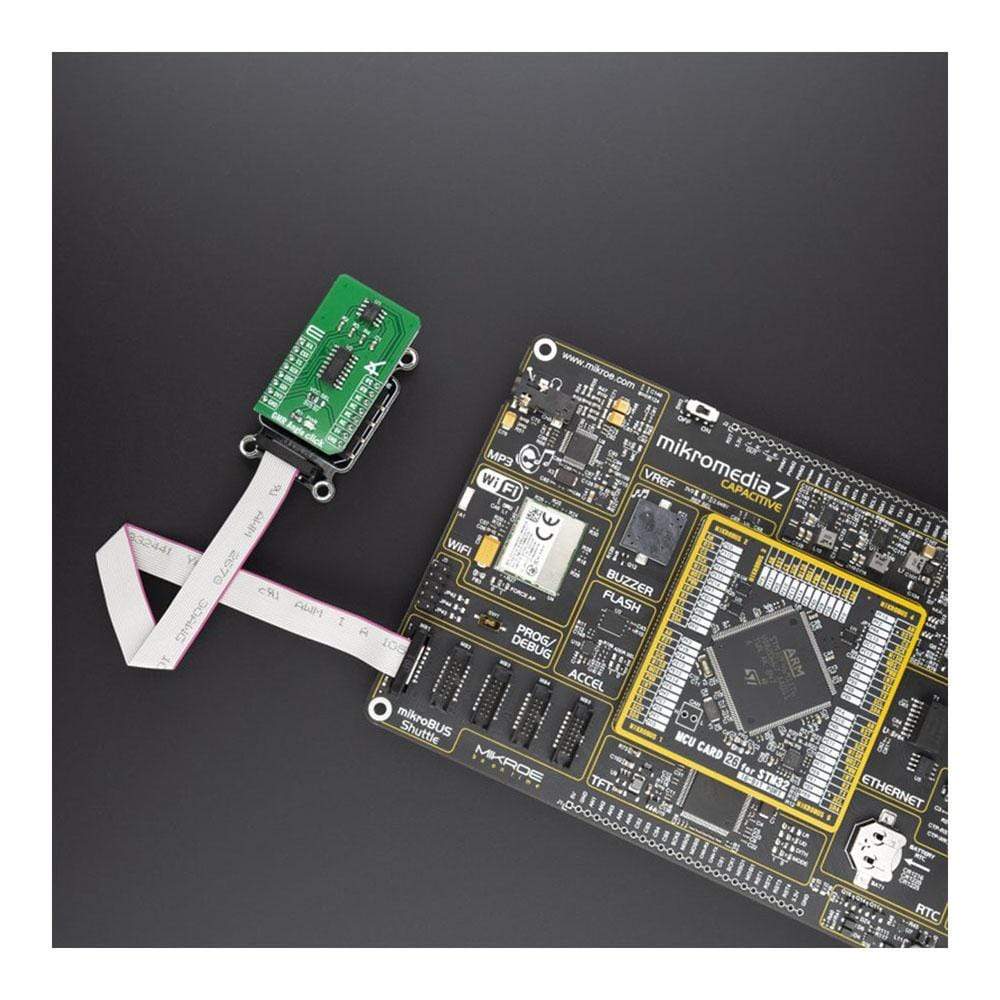
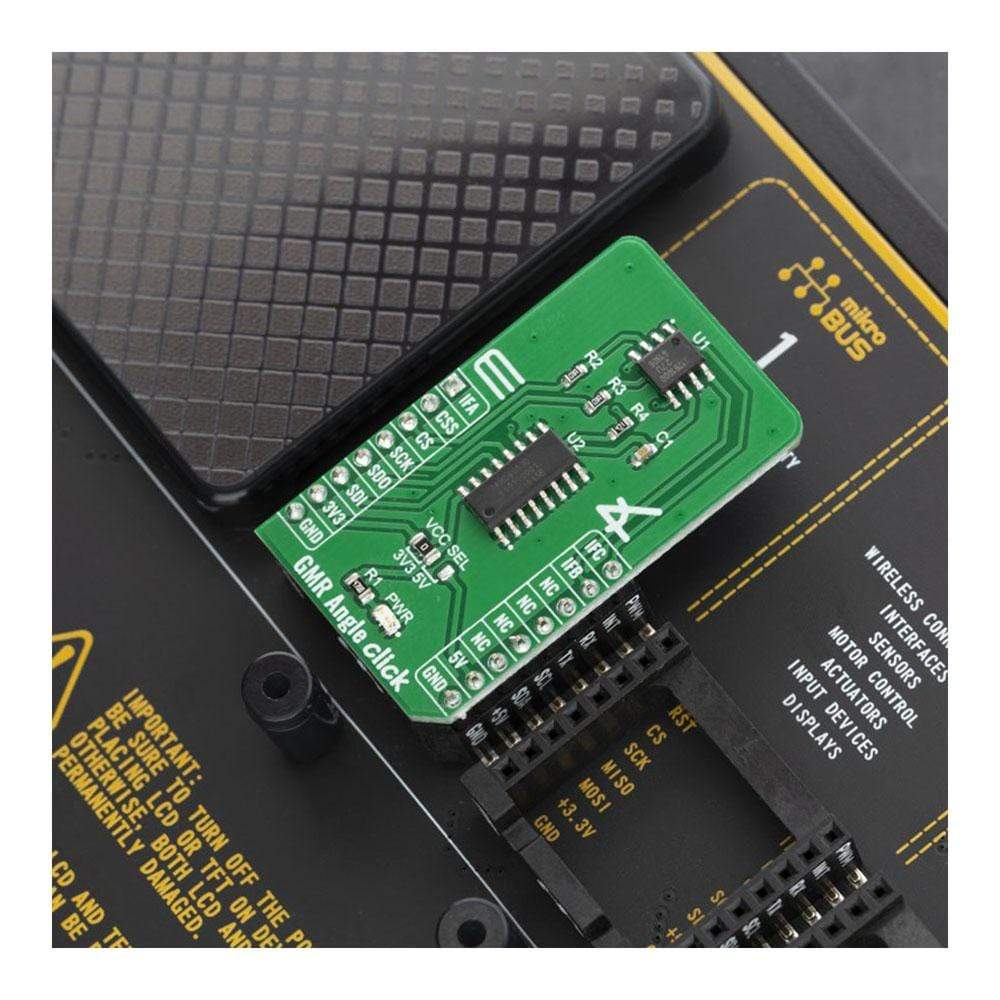
The GMR Angle click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das GMR Angle Click Board™ verfügt über den TLI5012B E1000, einen vorkalibrierten 360°-Winkelsensor von Infineon, der die Ausrichtung eines Magnetfelds erkennt. Das GMR Angle Click ist ideal für die Winkelpositionserkennung in Industrie- und Verbraucheranwendungen wie einem elektrisch kommutierten Motor (z. B. BLDC), Lüftern oder Pumpen.
Das GMR Angle Click wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3815
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018719747
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.