


Mikroelektronika d.o.o.
Vibro Motor 2 Click-Platine
Vibro Motor 2 Click-Platine
SKU: MIKROE-3713
Verfügbarkeit für Abholungen konnte nicht geladen werden


Overview
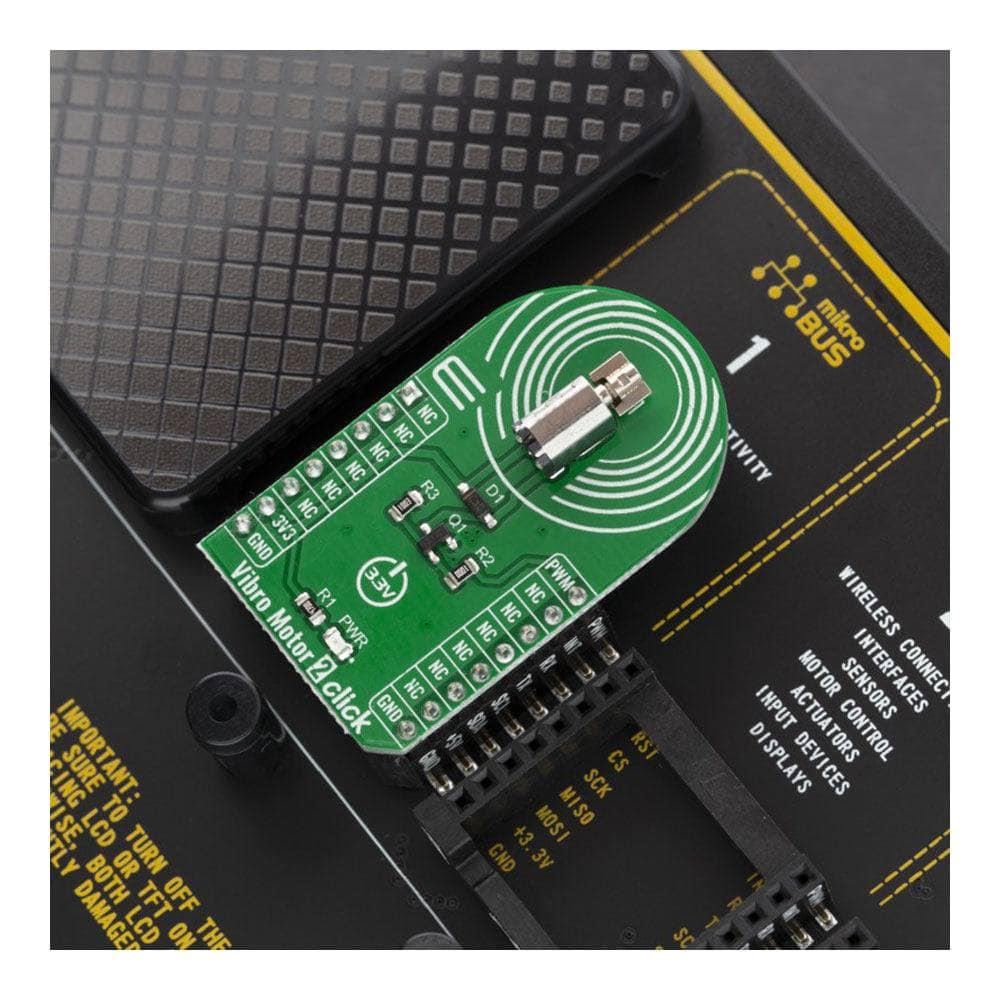
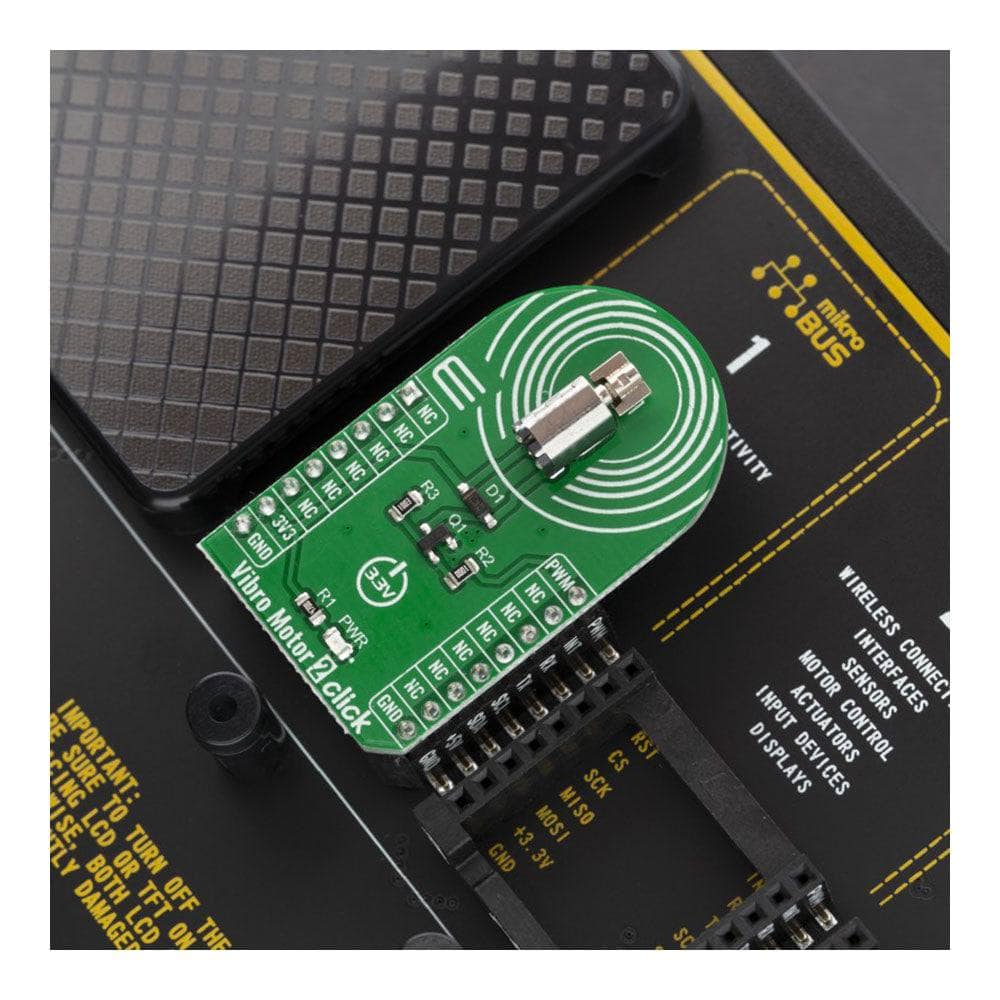
The Vibro Motor 2 Click Board™ features a compact size Eccentric Rotating Mass (ERM) motor, labelled as Z4FC1B1301781 as well as DMG3420U MOSFET to drive the ERM motor since the MCU itself cannot provide enough power for the motor driving. This type of motor is often used for haptic feedback on many small handheld devices, such as cellphones, pagers, RFID scanners and similar devices. This motor contains a small eccentric weight on its rotor, so while rotating it also produces a vibration effect. This kind of motor is sometimes referred to as a coin motor, due to its shape.
Besides the vibration motor, the click is also equipped with the DMG3420U, a small MOSFET, which is used to drive the motor. The Vibro Motor 2 Click Board™ is an ideal solution for adding simple, one pin-driven haptic feedback to any design.
Downloads
Das Vibro Motor 2 Click Board™ verfügt über einen kompakten ERM-Motor (Excentric Rotating Mass) mit der Bezeichnung Z4FC1B1301781 sowie einen DMG3420U MOSFET zum Antrieb des ERM-Motors, da die MCU selbst nicht genügend Leistung für den Motorantrieb liefern kann. Dieser Motortyp wird häufig für haptisches Feedback bei vielen kleinen Handheld-Geräten wie Mobiltelefonen, Pagern, RFID-Scannern und ähnlichen Geräten verwendet. Dieser Motor enthält ein kleines exzentrisches Gewicht auf seinem Rotor, sodass er beim Drehen auch einen Vibrationseffekt erzeugt. Aufgrund seiner Form wird dieser Motortyp manchmal als Münzmotor bezeichnet.
Neben dem Vibrationsmotor ist das Click auch mit dem DMG3420U ausgestattet, einem kleinen MOSFET, der zum Antrieb des Motors verwendet wird. Das Vibro Motor 2 Click Board™ ist eine ideale Lösung, um jedem Design einfaches, über einen Pin gesteuertes haptisches Feedback hinzuzufügen.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3713
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606018716715
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.