







Mikroelektronika d.o.o.
Servo-Click-Platine
Servo-Click-Platine
SKU: MIKROE-3133
Verfügbarkeit für Abholungen konnte nicht geladen werden


Overview
Introducing the Servo Click Board™: Revolutionize Your Servo Control
Are you tired of struggling with limited servo control options? Look no further! The Servo Click Board™ is here to transform your servo control experience.
Unleash the Power of 16-Channel PWM Control
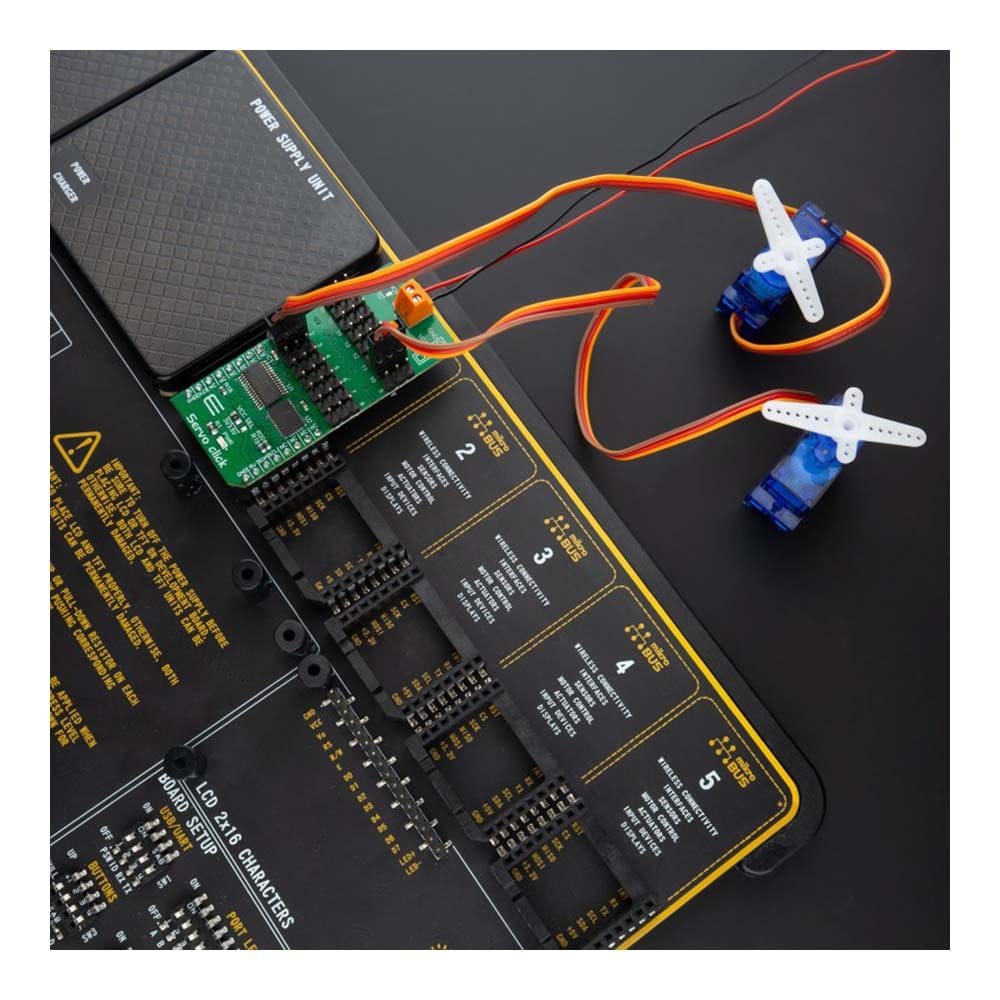
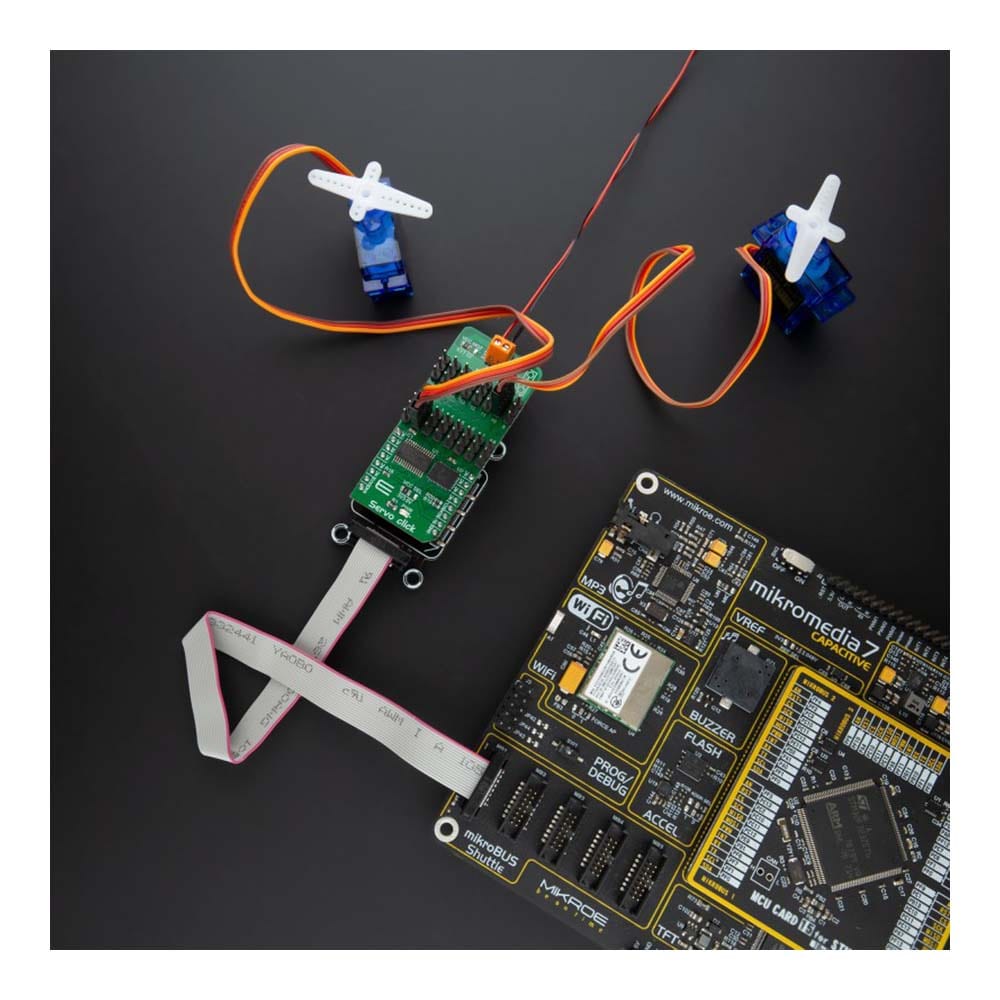
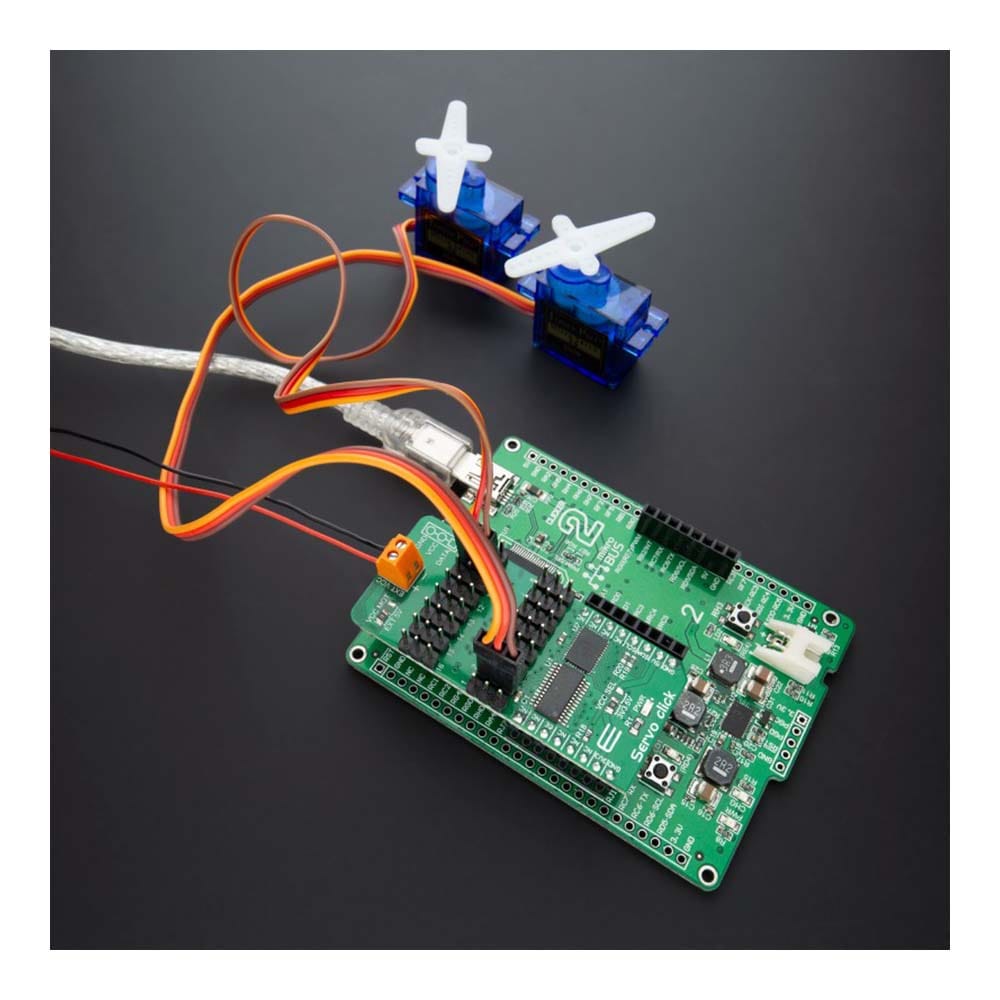
Say goodbye to single-channel limitations. With the Servo Click Board™, you can simultaneously control a whopping 16 servo motors! Each servo enjoys its own programmable PWM signal, giving you unparalleled flexibility and precision in your projects.
Fine-Tune Your Servo Performance
Precision matters. That's why we equipped the Servo Click Board™ with a programmable PWM signal frequency range from 24 Hz to 1526 Hz. This range is meticulously chosen to cater to various servo types, ensuring that your creations move with the utmost precision and accuracy.
Real-Time Insights with Voltage Sensing
What sets the Servo Click Board™ apart is its 16-bit A/D converter, which samples the voltage drop across each channel's shunt resistor. This means you get real-time feedback on servo current consumption, allowing you to optimize performance and prevent overheating without any need for modifying your servos.
Why Choose the Servo Click Board™?
- Effortless Control: Control up to 16 servos with ease, streamlining your projects and saving you time.
- Precision in Every Move: Fine-tune your servos to perfection with a wide PWM signal frequency range.
- Protect Your Servos: Monitor current consumption in real-time to prevent damage and enhance longevity.
Make the smart choice and experience a new level of servo control with the Servo Click Board™. Elevate your projects, unlock limitless possibilities, and join the ranks of satisfied customers who have already made the switch.
Ready to revolutionize your servo control? Click the button below and take the first step towards a brighter, more precise future!
Get Your Servo Click Board™ Now
Don't miss out on this game-changing innovation. Upgrade your servo control today!
Downloads
Einführung des Servo Click Board™: Revolutionieren Sie Ihre Servosteuerung
Sind Sie es leid, mit begrenzten Servosteuerungsoptionen zu kämpfen? Dann sind Sie hier richtig! Das Servo Click Board™ wird Ihr Servosteuerungserlebnis revolutionieren.
Entfesseln Sie die Leistung der 16-Kanal-PWM-Steuerung
Verabschieden Sie sich von Einkanalbeschränkungen. Mit dem Servo Click Board™ können Sie satte 16 Servomotoren gleichzeitig steuern! Jeder Servo verfügt über sein eigenes programmierbares PWM-Signal, was Ihnen beispiellose Flexibilität und Präzision in Ihren Projekten bietet.
Optimieren Sie die Leistung Ihres Servos
Präzision ist wichtig. Deshalb haben wir das Servo Click Board™ mit einem programmierbaren PWM-Signalfrequenzbereich von 24 Hz bis 1526 Hz ausgestattet. Dieser Bereich wurde sorgfältig ausgewählt, um verschiedenen Servotypen gerecht zu werden und sicherzustellen, dass sich Ihre Kreationen mit höchster Präzision und Genauigkeit bewegen.
Echtzeit-Einblicke mit Spannungsmessung
Was das Servo Click Board™ auszeichnet, ist sein 16-Bit-A/D-Wandler, der den Spannungsabfall über dem Shunt-Widerstand jedes Kanals abtastet. Dies bedeutet, dass Sie Echtzeit-Feedback zum Stromverbrauch des Servos erhalten, sodass Sie die Leistung optimieren und eine Überhitzung verhindern können, ohne Ihre Servos ändern zu müssen.
Warum sollten Sie sich für das Servo Click Board™ entscheiden?
- Mühelose Steuerung : Steuern Sie mühelos bis zu 16 Servos, rationalisieren Sie Ihre Projekte und sparen Sie Zeit.
- Präzision bei jeder Bewegung : Stimmen Sie Ihre Servos mit einem breiten PWM-Signalfrequenzbereich perfekt ab.
- Schützen Sie Ihre Servos : Überwachen Sie den Stromverbrauch in Echtzeit, um Schäden vorzubeugen und die Lebensdauer zu verlängern.
Treffen Sie die kluge Wahl und erleben Sie mit dem Servo Click Board™ eine neue Ebene der Servosteuerung. Optimieren Sie Ihre Projekte, erschließen Sie grenzenlose Möglichkeiten und schließen Sie sich den zufriedenen Kunden an, die bereits umgestiegen sind.
Sind Sie bereit, Ihre Servosteuerung zu revolutionieren? Klicken Sie auf die Schaltfläche unten und machen Sie den ersten Schritt in eine bessere, präzisere Zukunft!
Holen Sie sich jetzt Ihr Servo Click Board™
Verpassen Sie diese bahnbrechende Innovation nicht. Rüsten Sie Ihre Servosteuerung noch heute auf!
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3133
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.027 kg
|
| Other | |
EAN |
8606018713448
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.