

Mikroelektronika d.o.o.
Smart Buck Klickbrett
Smart Buck Klickbrett
SKU: MIKROE-3113
Verfügbarkeit für Abholungen konnte nicht geladen werden

Overview
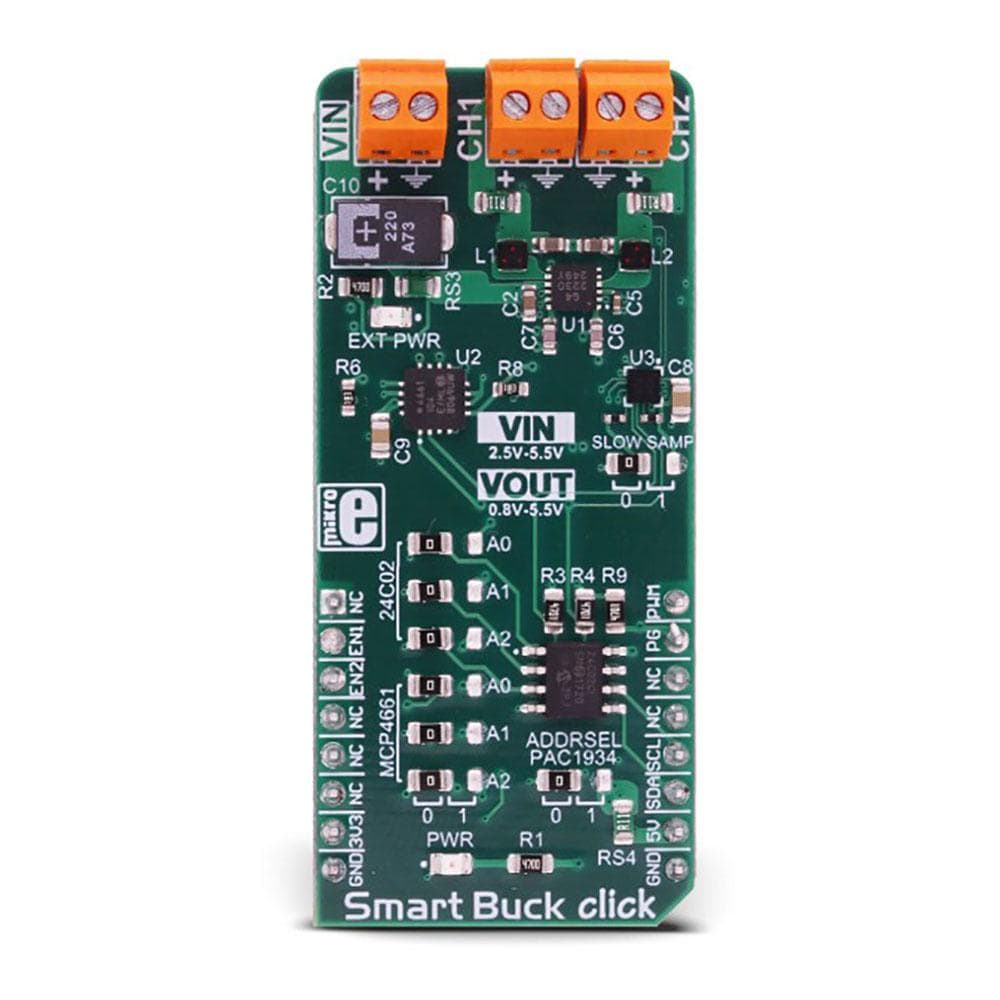
The Smart Buck Click Board™ is the two-channel step-down DC/DC converter and regulator, with plenty of additional functions. It can provide voltage measurement at each of its two programmable voltage outputs, as well as the measurement of the current consumption. In addition, it can also provide power consumption measurements of the Smart Buck Click Board™, both at the mikroBUS +5V power rail, and the external voltage input terminal. Finally, there is 2kbit of EEPROM at disposal, which can be used for logging the measurements, storage of the working parameters, or any other type of general purpose data.
Downloads
Das Smart Buck Click Board™ ist ein zweikanaliger DC/DC-Abwärtswandler und -Regler mit zahlreichen Zusatzfunktionen. Es kann an jedem seiner beiden programmierbaren Spannungsausgänge Spannungsmessungen sowie die Messung des Stromverbrauchs durchführen. Darüber hinaus kann es auch Stromverbrauchsmessungen des Smart Buck Click Board™ durchführen, sowohl an der Mikrobus-Stromschiene +5 V als auch am externen Spannungseingangsanschluss. Schließlich stehen 2 kbit EEPROM zur Verfügung, die zum Protokollieren der Messungen, Speichern der Arbeitsparameter oder anderer Arten allgemeiner Daten verwendet werden können.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3113
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.022 kg
|
| Other | |
EAN |
8606018713479
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.