


Mikroelektronika d.o.o.
DC-Motor 8 Click-Platine
DC-Motor 8 Click-Platine
SKU: MIKROE-2893
Verfügbarkeit für Abholungen konnte nicht geladen werden

Overview
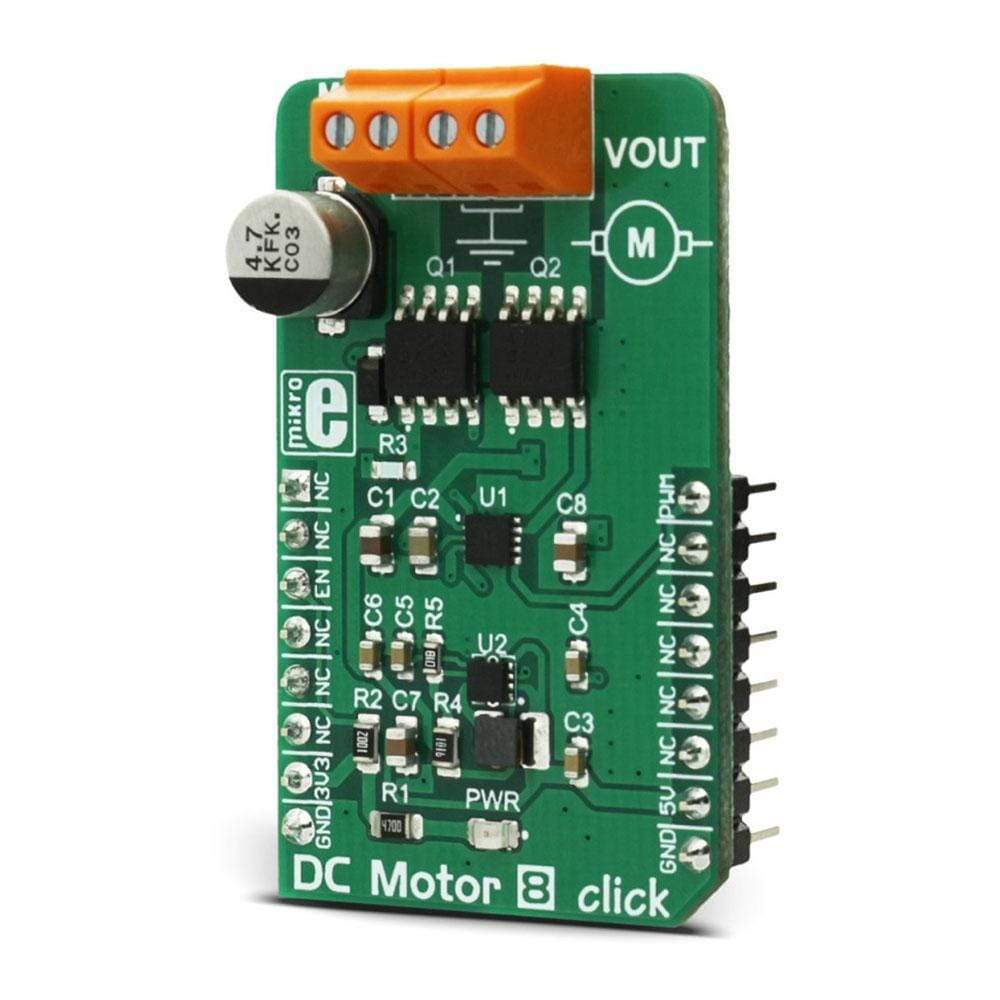
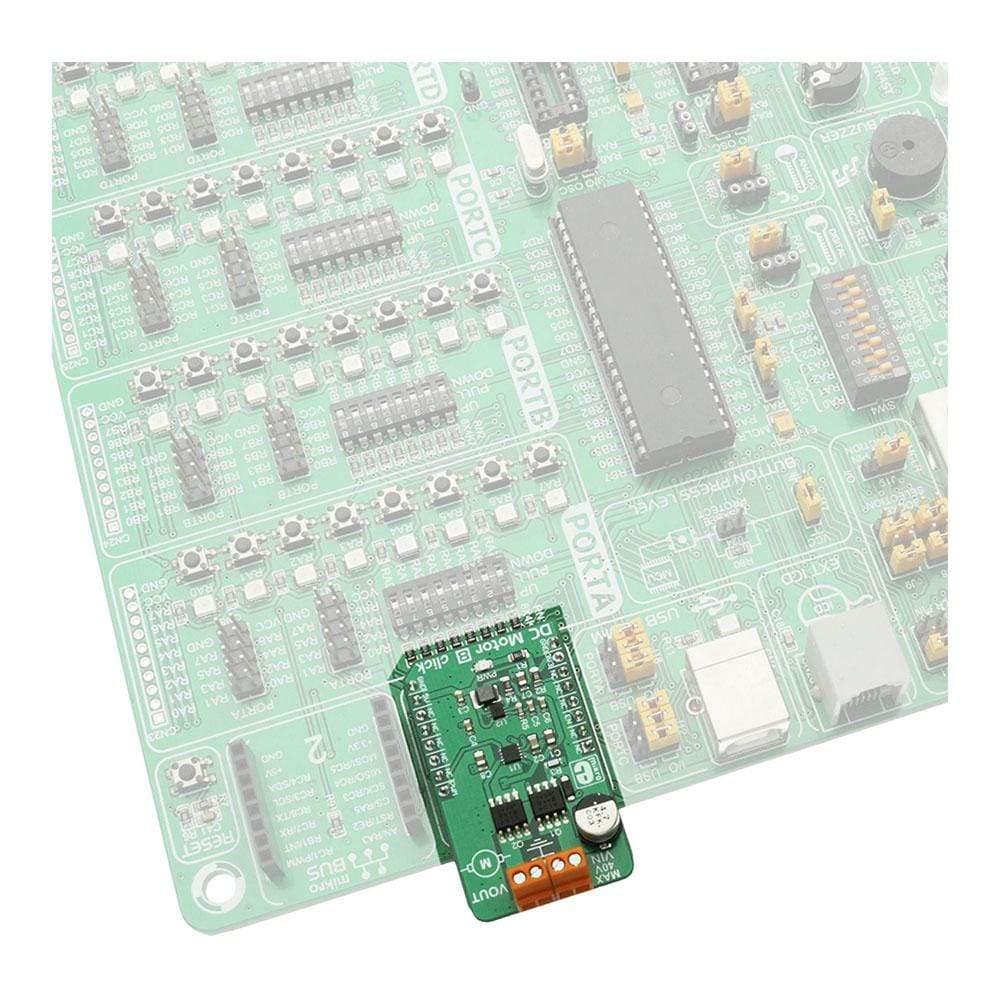
The DC Motor 8 Click Board™ is a DC motor driver. It can drive simple DC motors with brushes, providing them with a significant amount of current and voltage up to 40V. The Click Board™ has one control input, that uses the PWM signal from the host MCU. It uses the half-bridge topology to regulate the speed of the motor rotation, employs advanced dead-time circuitry that monitors the output stage, providing maximum switching efficiency and features an advanced technique to avoid shoot-through currents.
Downloads
Das DC Motor 8 Click Board™ ist ein Gleichstrommotortreiber. Es kann einfache Gleichstrommotoren mit Bürsten antreiben und ihnen eine erhebliche Menge an Strom und Spannung bis zu 40 V liefern. Das Click Board™ hat einen Steuereingang, der das PWM-Signal vom Host-MCU verwendet. Es verwendet die Halbbrückentopologie, um die Geschwindigkeit der Motorrotation zu regeln, verwendet erweiterte Totzeitschaltungen, die die Ausgangsstufe überwachen, bietet maximale Schaltleistung und verfügt über eine erweiterte Technik, um Durchschussströme zu vermeiden.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-2893
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.025 kg
|
| Other | |
EAN |
8606018712328
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.