
Mikroelektronika d.o.o.
Kompass-Klick-Board
Kompass-Klick-Board
SKU: MIKROE-1386
Verfügbarkeit für Abholungen konnte nicht geladen werden
Overview
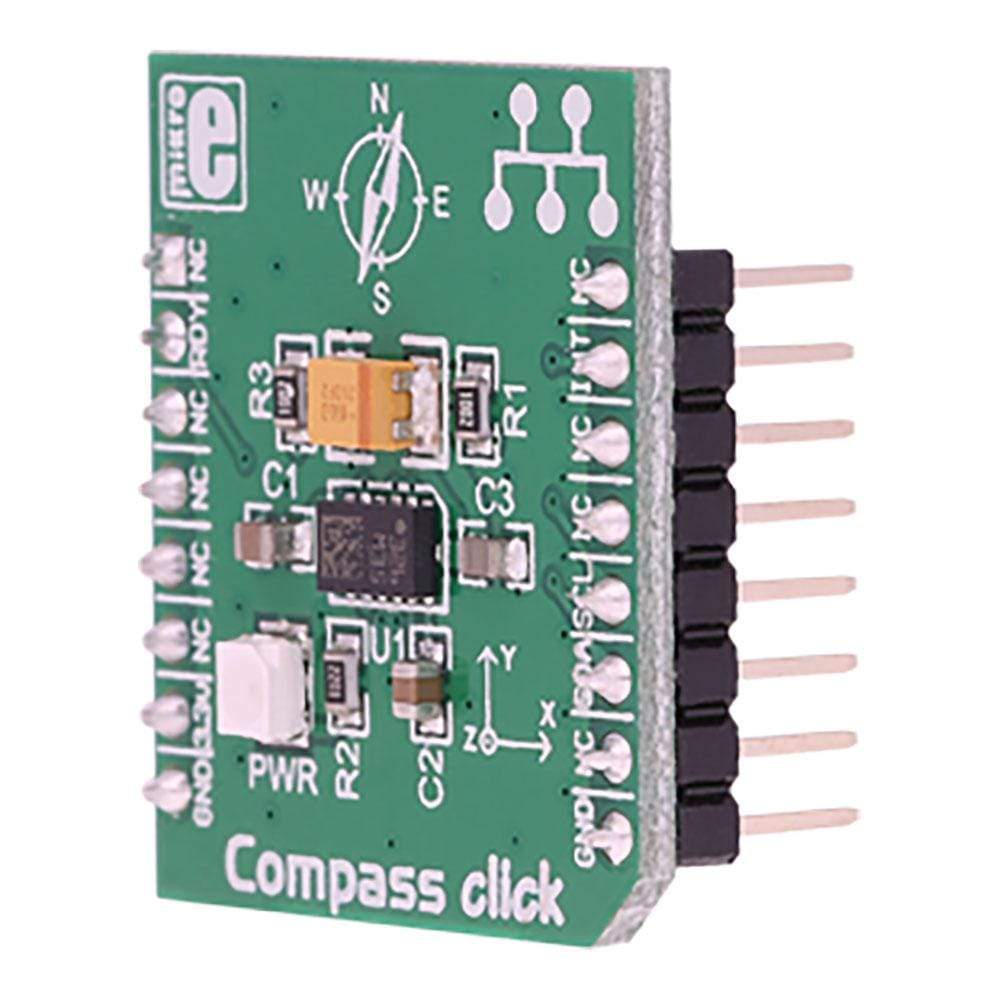
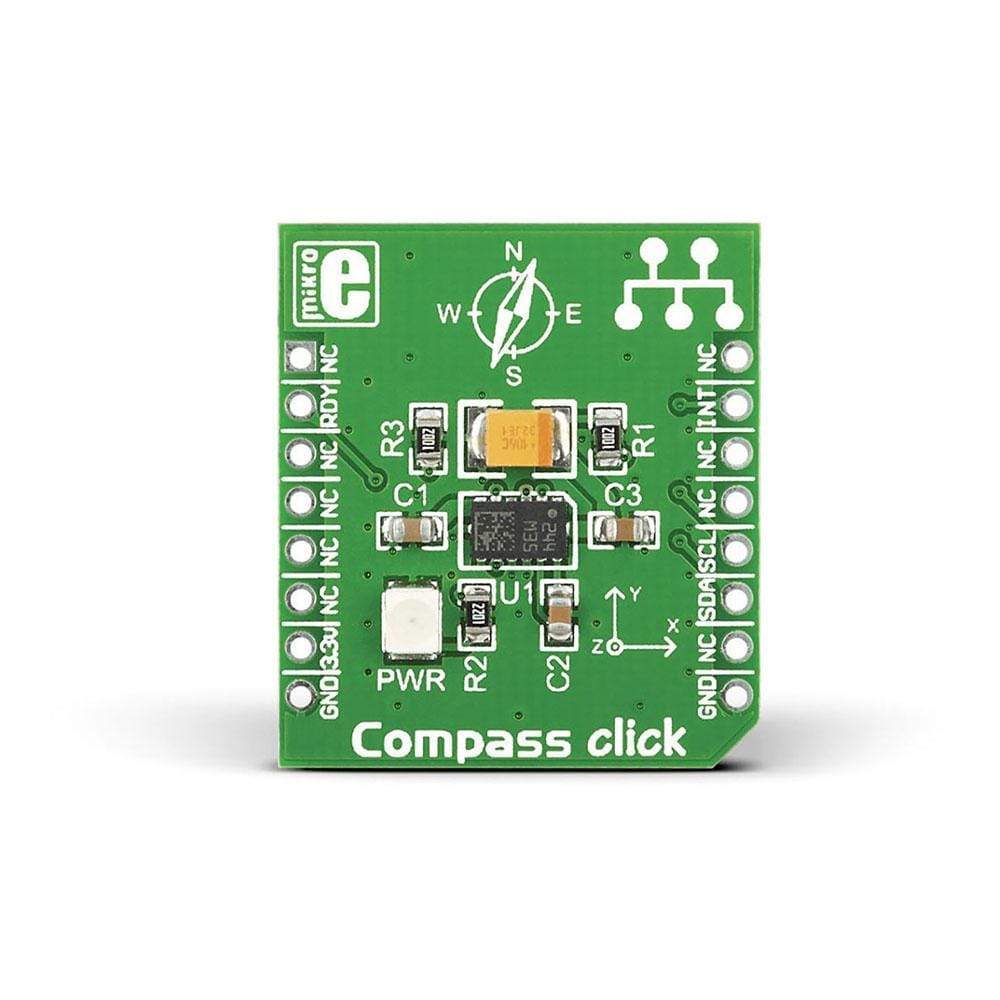
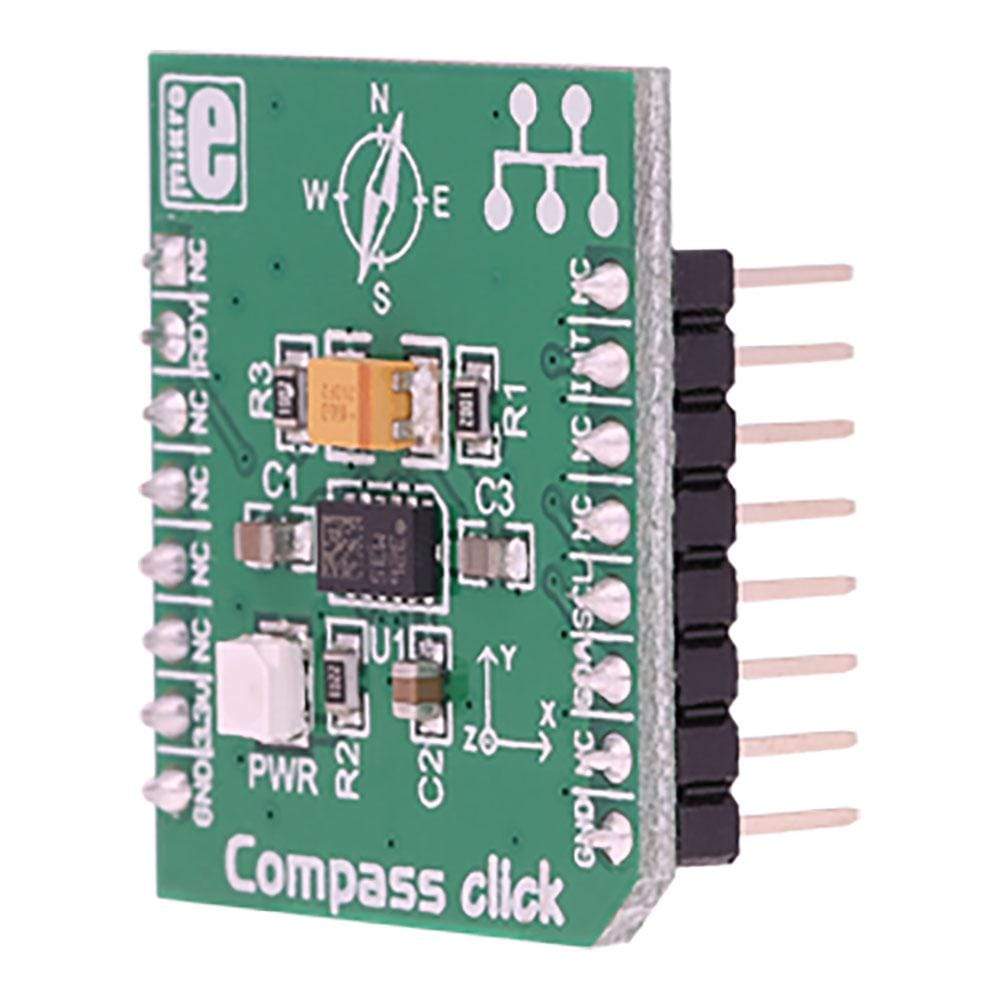
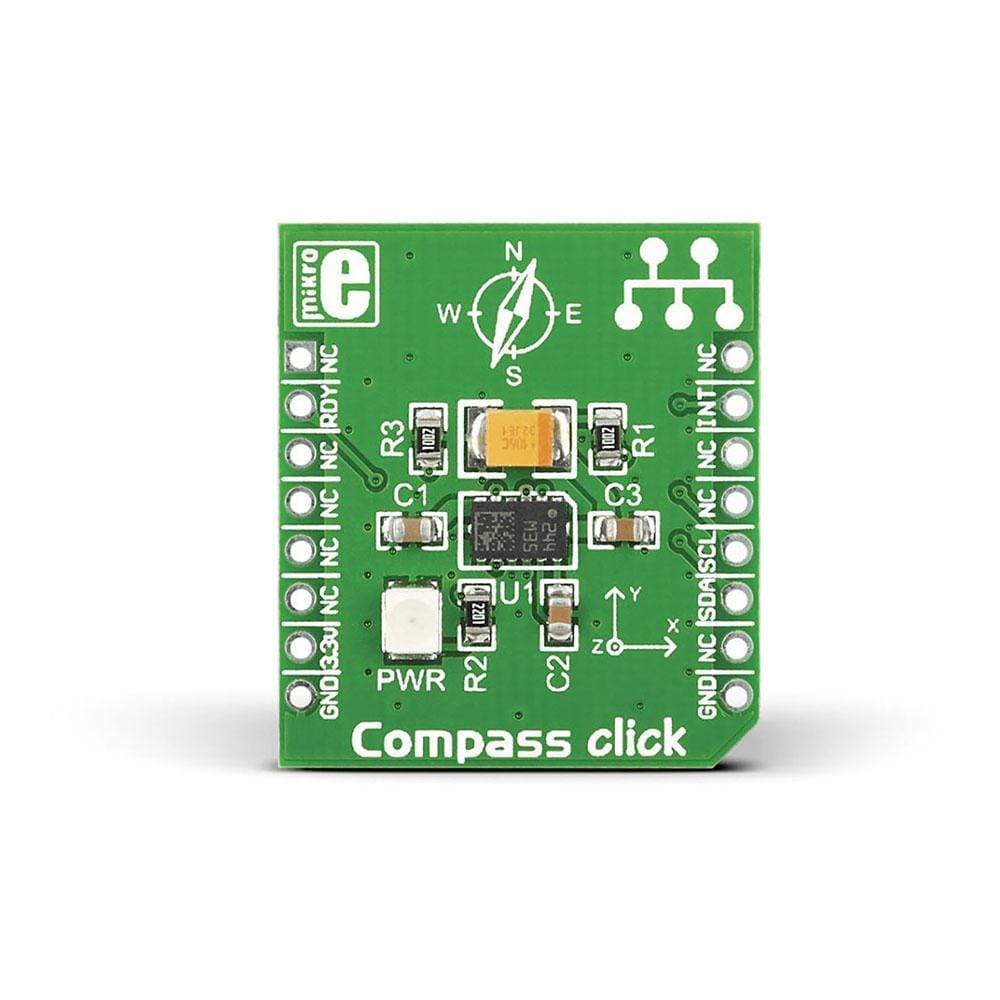
The Compass Click Board™ is an add-on board in the mikroBUS form factor. It features the LSM303DLHC ultra-compact high-performance e-compass module. It includes a specific sensing element and an IC interface capable of measuring both linear acceleration (full-scale of ±2g/±4g/±8g/±16g) and magnetic field (From ±1.3 to ±8.1 gauss full-scale) and provides a 16-bit data output through the I2C interface. Readings received from the IC can be processed and used to determine the earth’s magnetic north pole.
The Compass Click Board™ is designed to use a 3.3V power supply only. All these features make this board ideal for compensated compass, position detection, map rotation, pedometer, display orientation and many more.
Downloads
Das Compass Click Board™ ist eine Zusatzplatine im MikroBUS-Formfaktor. Es verfügt über das ultrakompakte Hochleistungs-E-Kompassmodul LSM303DLHC. Es umfasst ein spezielles Sensorelement und eine IC-Schnittstelle, die sowohl lineare Beschleunigung (Vollausschlag von ±2 g/±4 g/±8 g/±16 g) als auch magnetisches Feld (von ±1,3 bis ±8,1 Gauss Vollausschlag) messen kann und einen 16-Bit-Datenausgang über die I2C-Schnittstelle bietet. Vom IC empfangene Messwerte können verarbeitet und zur Bestimmung des magnetischen Nordpols der Erde verwendet werden.
Das Compass Click Board™ ist ausschließlich für die Verwendung mit einer 3,3-V-Stromversorgung ausgelegt. Dank all dieser Funktionen ist dieses Board ideal für kompensierten Kompass, Positionserkennung, Kartenrotation, Schrittzähler, Displayausrichtung und vieles mehr.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-1386
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.03 kg
|
| Other | |
EAN |
8606015074368
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.