

Lipowsky Industrie Elektronik GmbH
Lipowsky Baby-LIN-RM-III CAN/LIN-Bus-Simulator
Lipowsky Baby-LIN-RM-III CAN/LIN-Bus-Simulator
SKU: BABY-LIN-RM-III
Verfügbarkeit für Abholungen konnte nicht geladen werden

Key Features
Overview
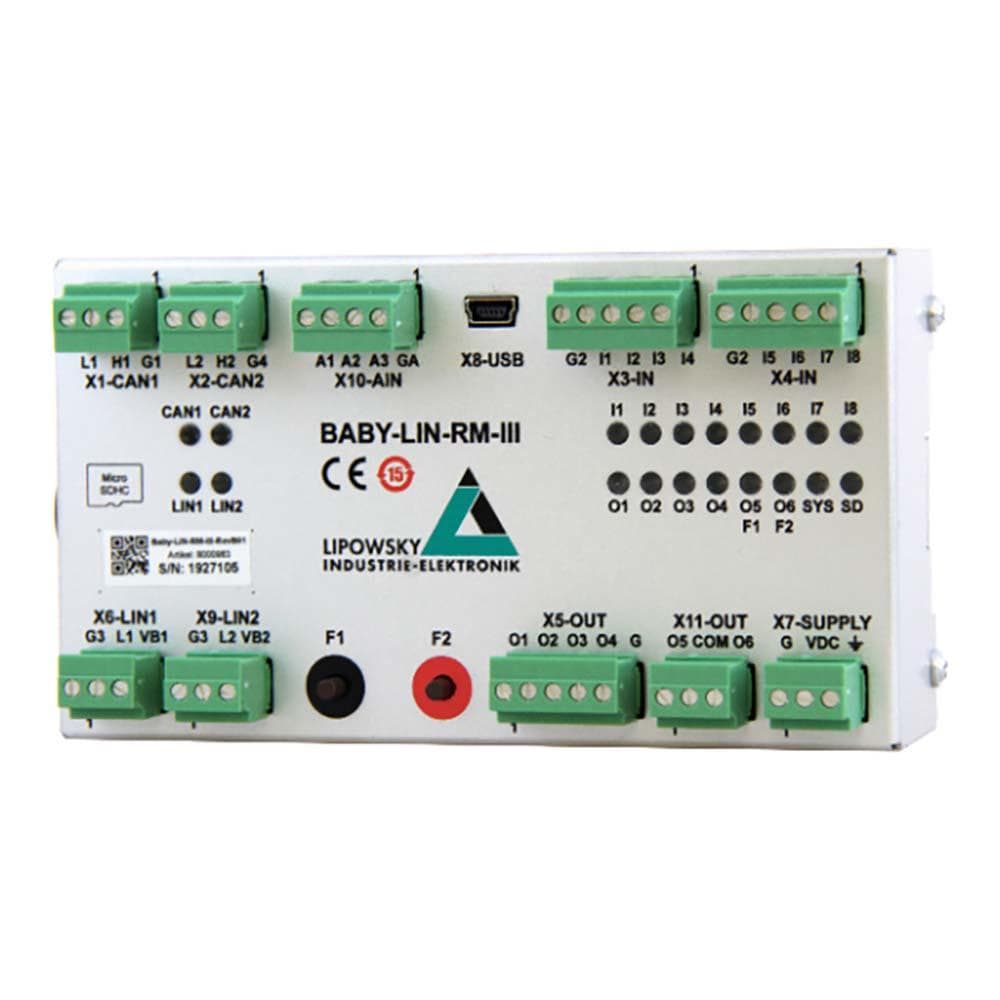
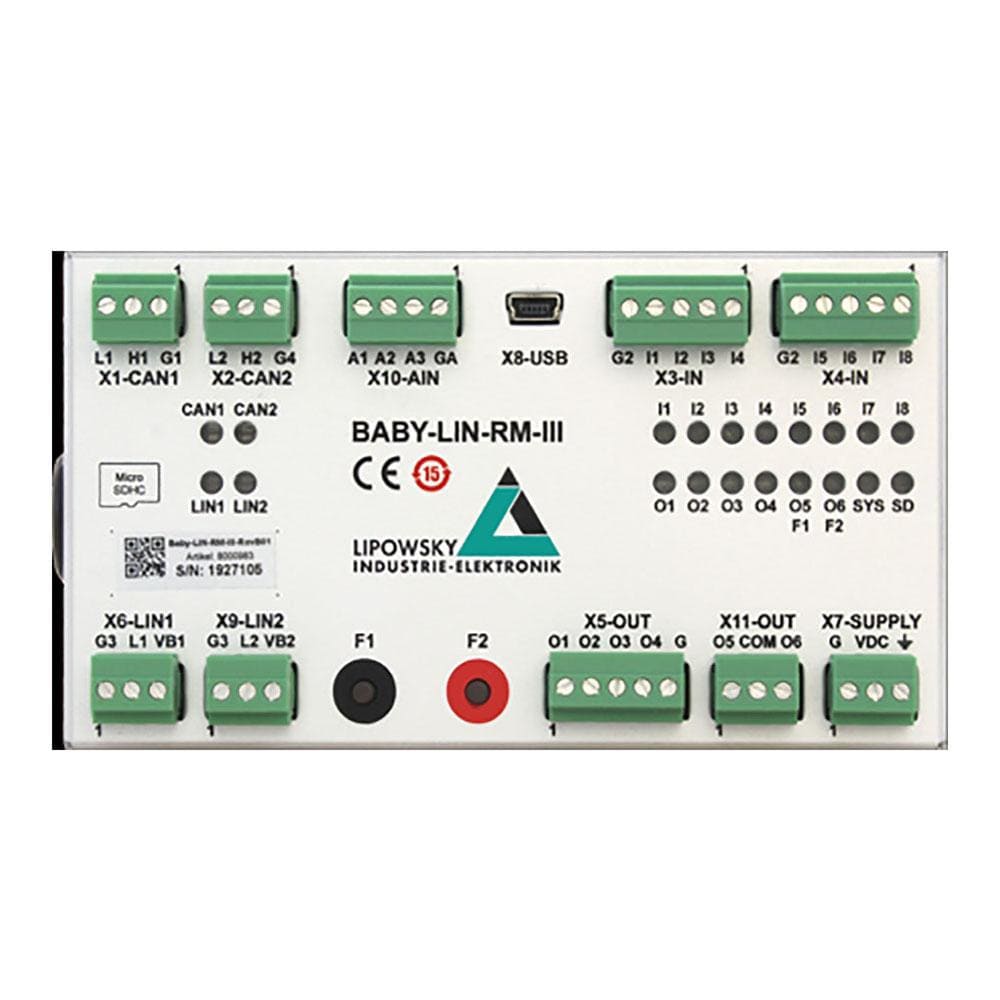
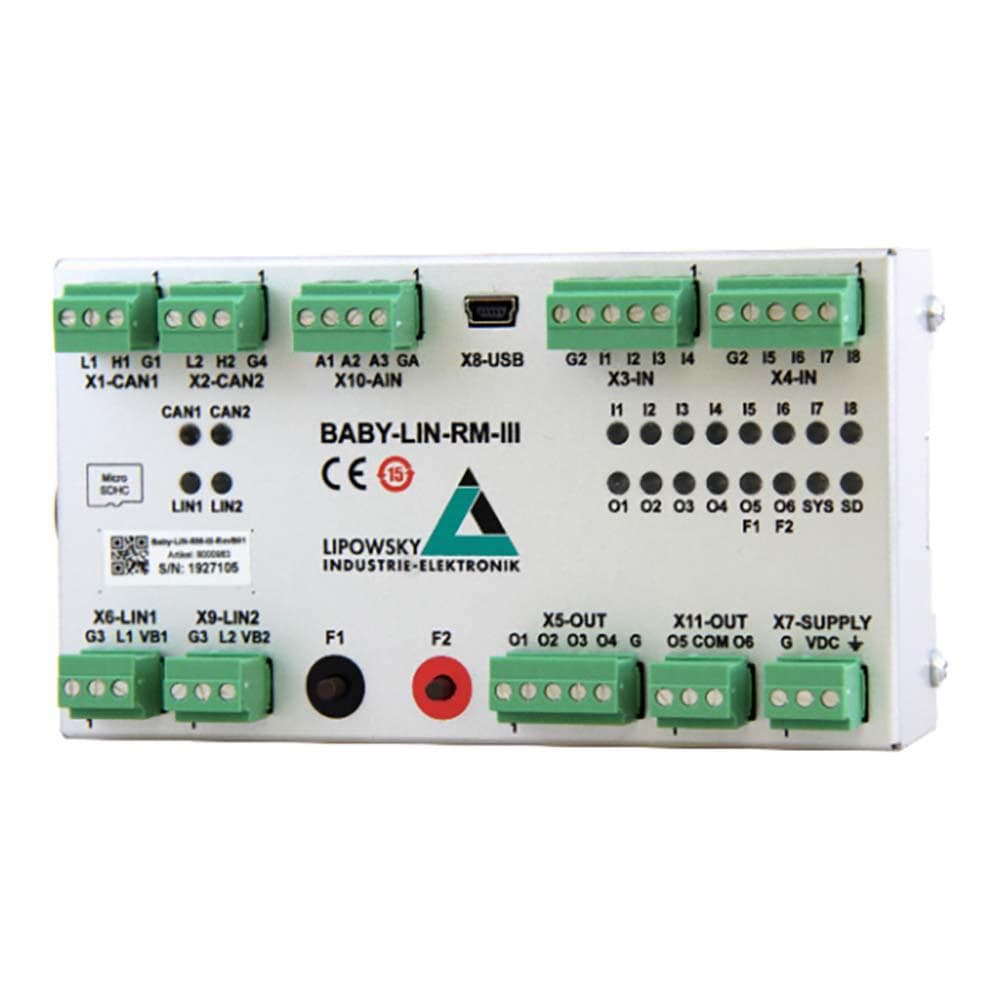
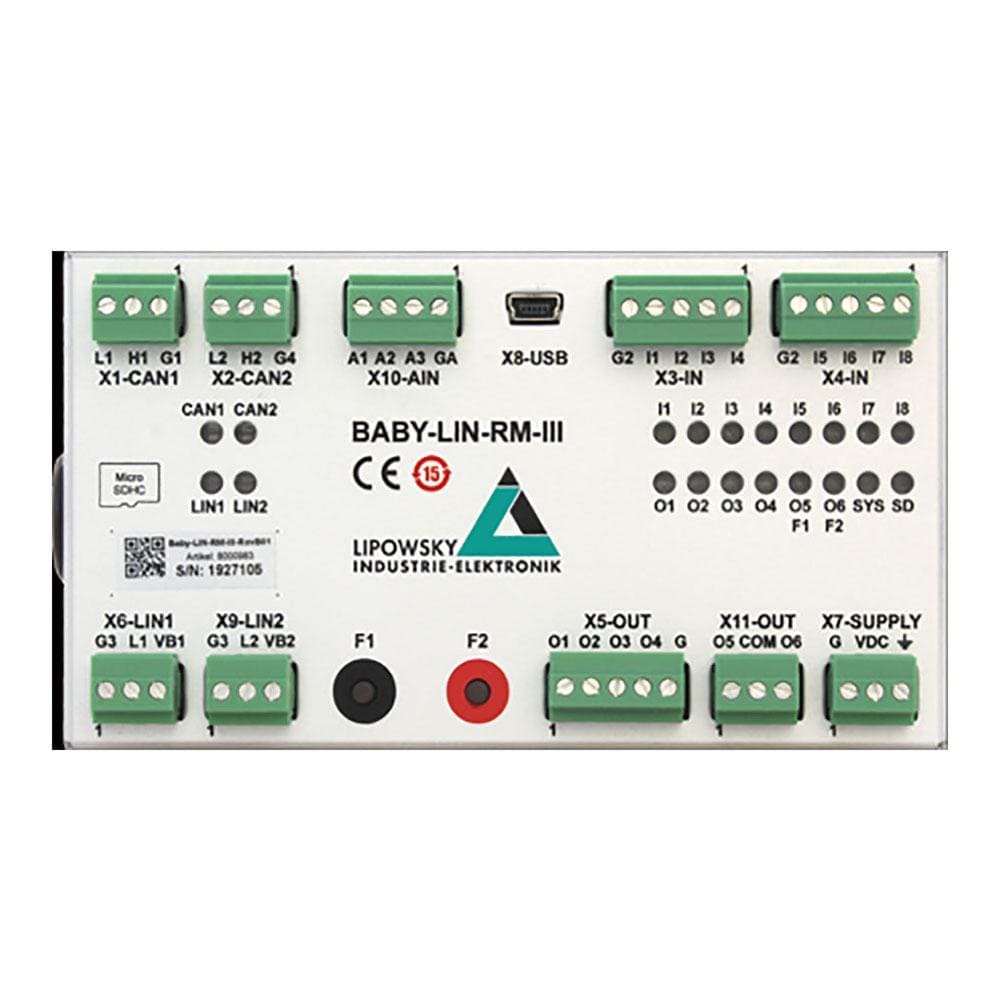
The Lipowsky Baby-LIN-RM-III allows LIN-Bus, CAN-Bus and CAN-FD Bus-equipped devices to be controlled by a PC.
The interface can simulate CAN and LIN-Bus Master and Slave nodes
After installation of the supplied LINWorks software, you can connect the Baby-LIN-RM-III to a free USB port and access the LIN- and CAN-Bus devices via LINWorks or your programs Baby-LIN-DLL. In addition, LIN and CAN devices can be controlled using digital signals only. This enhances testing facilities based on a PLC (Programmable Logic Controller) by a LIN- or CAN-Bus without much effort.
This can be highly beneficial to facilities with long-term testing.
Downloads
Mit dem Lipowsky Baby-LIN-RM-III können mit LIN-Bus, CAN-Bus und CAN-FD-Bus ausgestattete Geräte über einen PC gesteuert werden.
Die Schnittstelle kann CAN- und LIN-Bus-Master- und Slave-Knoten simulieren
Nach der Installation der mitgelieferten LINWorks-Software können Sie das Baby-LIN-RM-III an einen freien USB-Port anschließen und über LINWorks oder Ihre Programme Baby-LIN-DLL auf die LIN- und CAN-Bus-Geräte zugreifen. Darüber hinaus können LIN- und CAN-Geräte ausschließlich über digitale Signale angesteuert werden. Damit lassen sich Prüfstände, die auf einer SPS (Speicherprogrammierbare Steuerung) basieren, ohne großen Aufwand um einen LIN- oder CAN-Bus erweitern.
Dies kann für Einrichtungen mit Langzeittests äußerst vorteilhaft sein.
| General Information | |
|---|---|
Part Number (SKU) |
BABY-LIN-RM-III
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.5 kg
|
| Other | |
EAN |
5055383688678
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.