

Mikroelektronika d.o.o.
LED-Treiber 10 Click-Platine
LED-Treiber 10 Click-Platine
SKU: MIKROE-4787
Verfügbarkeit für Abholungen konnte nicht geladen werden

Overview
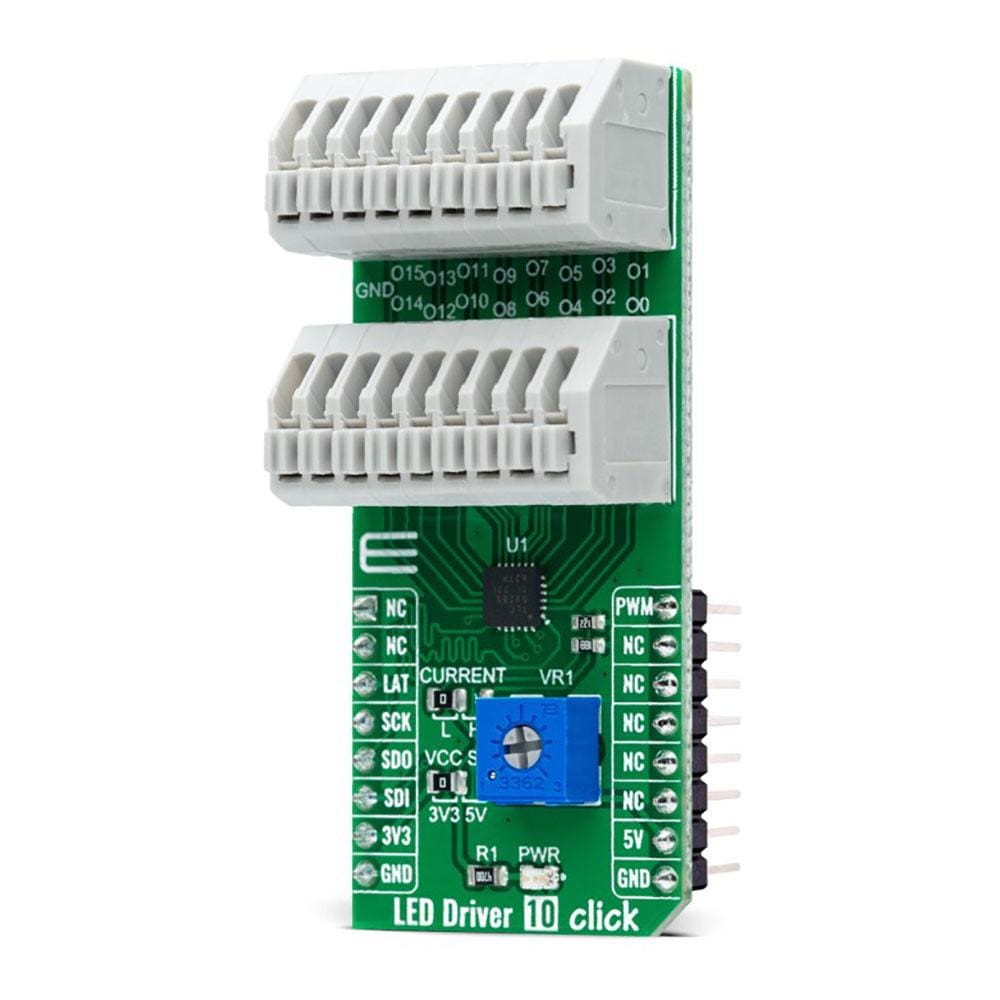
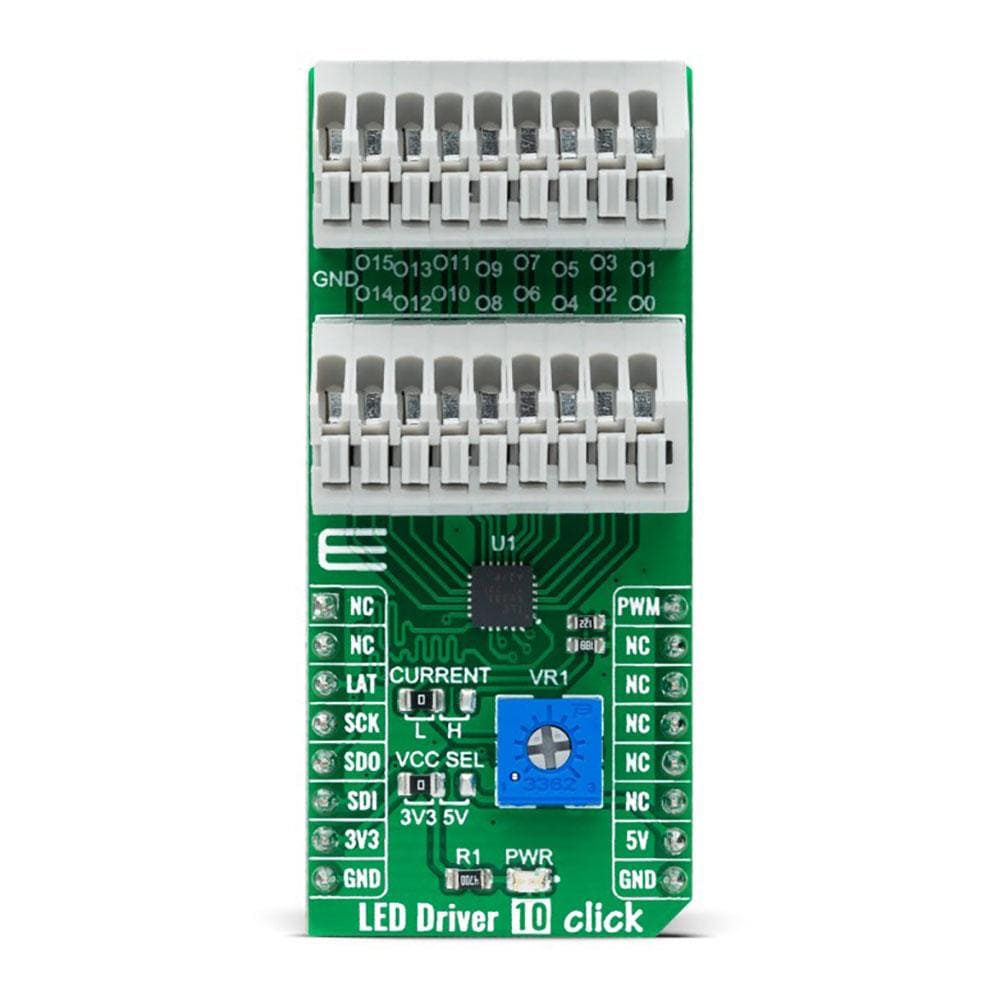
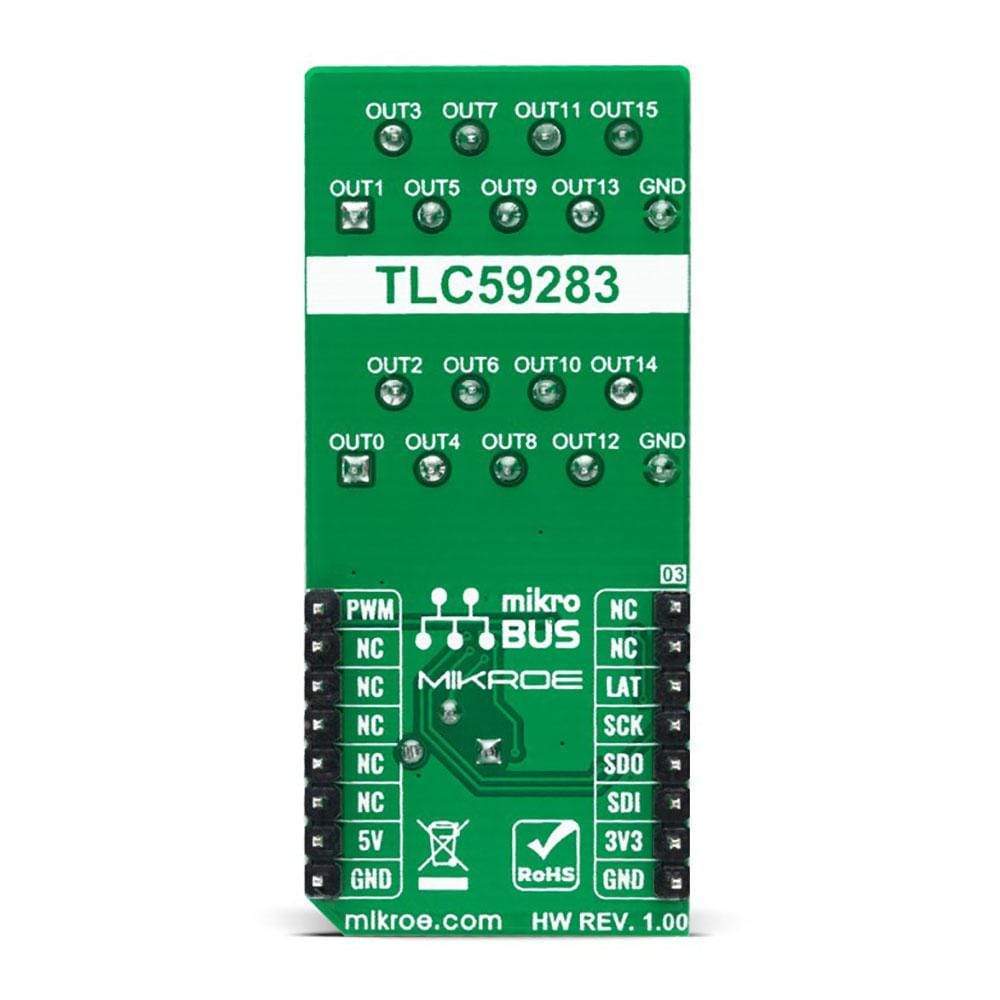
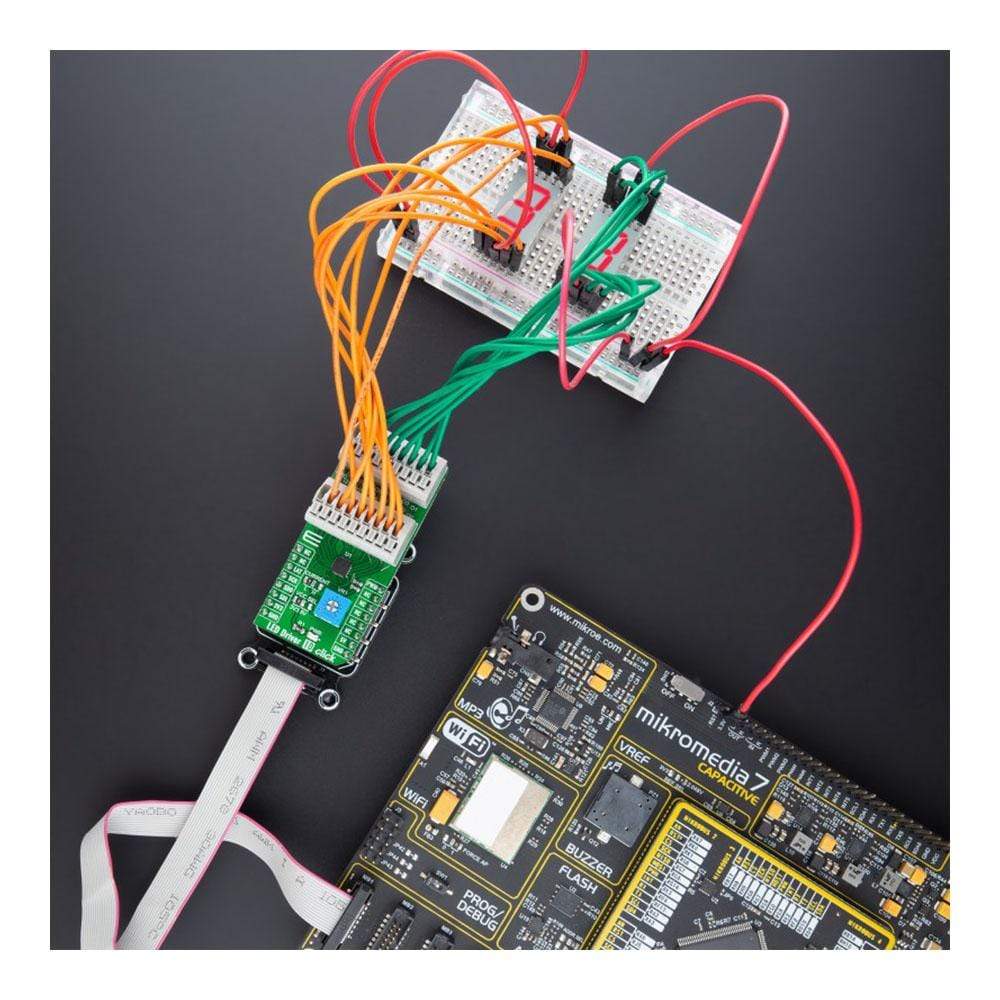
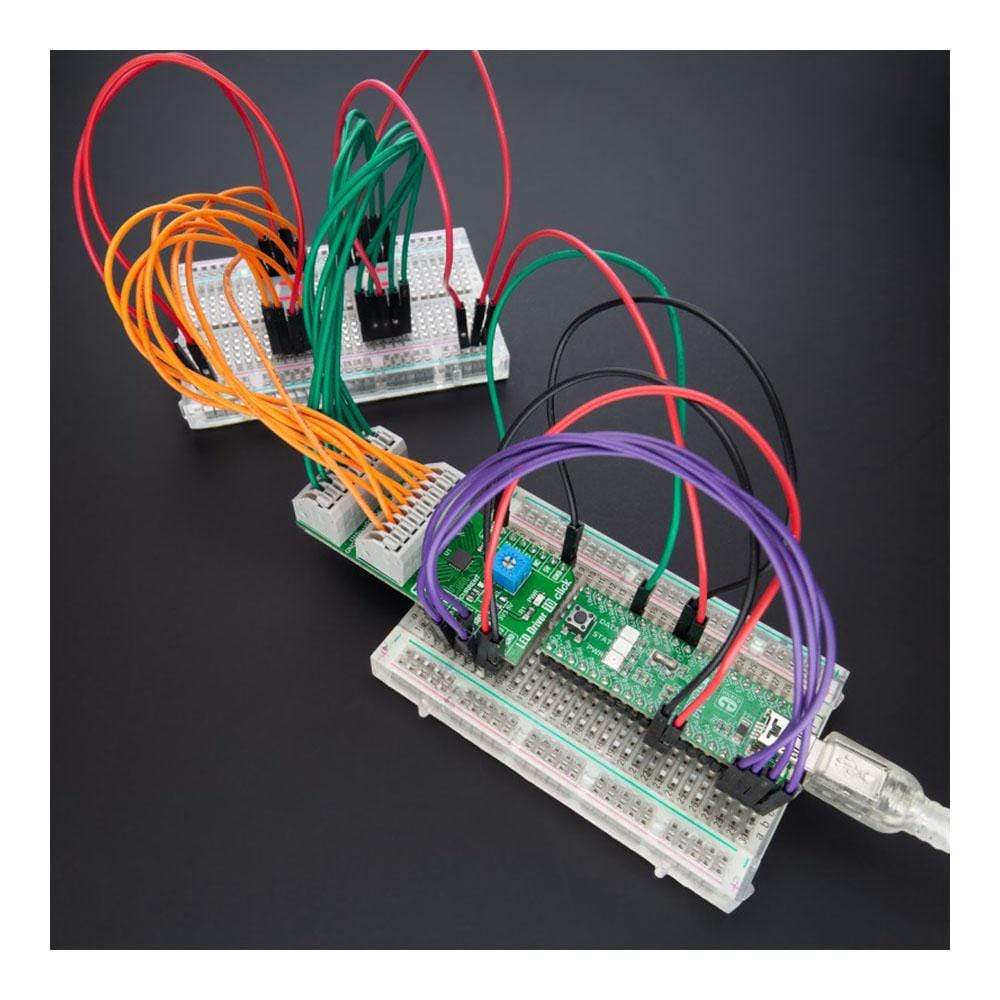
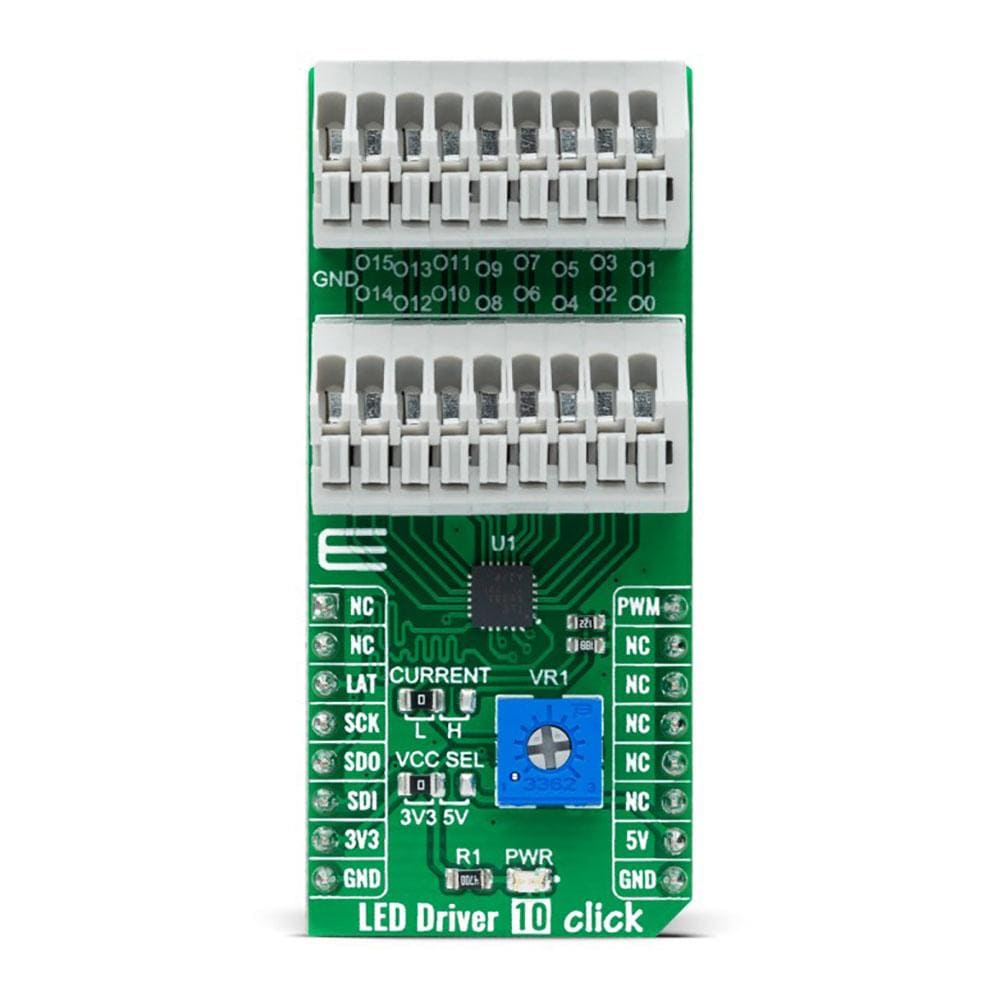
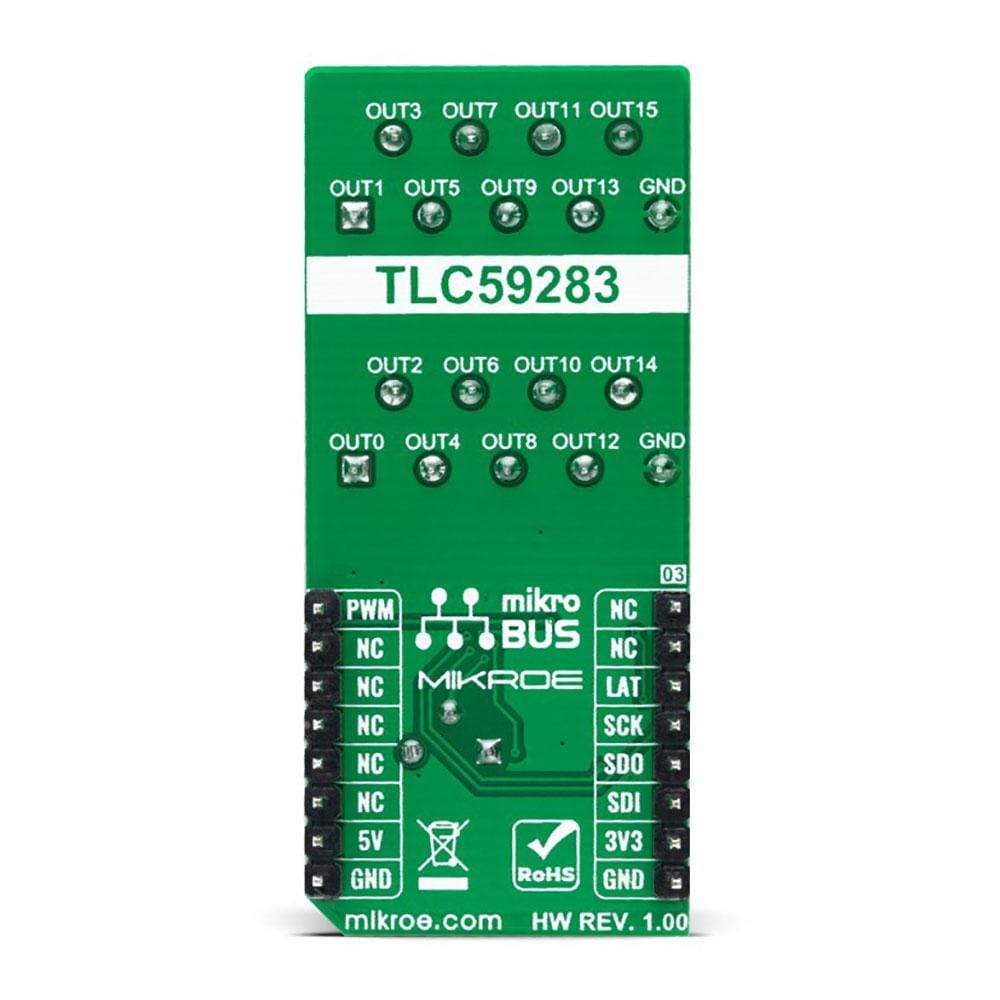
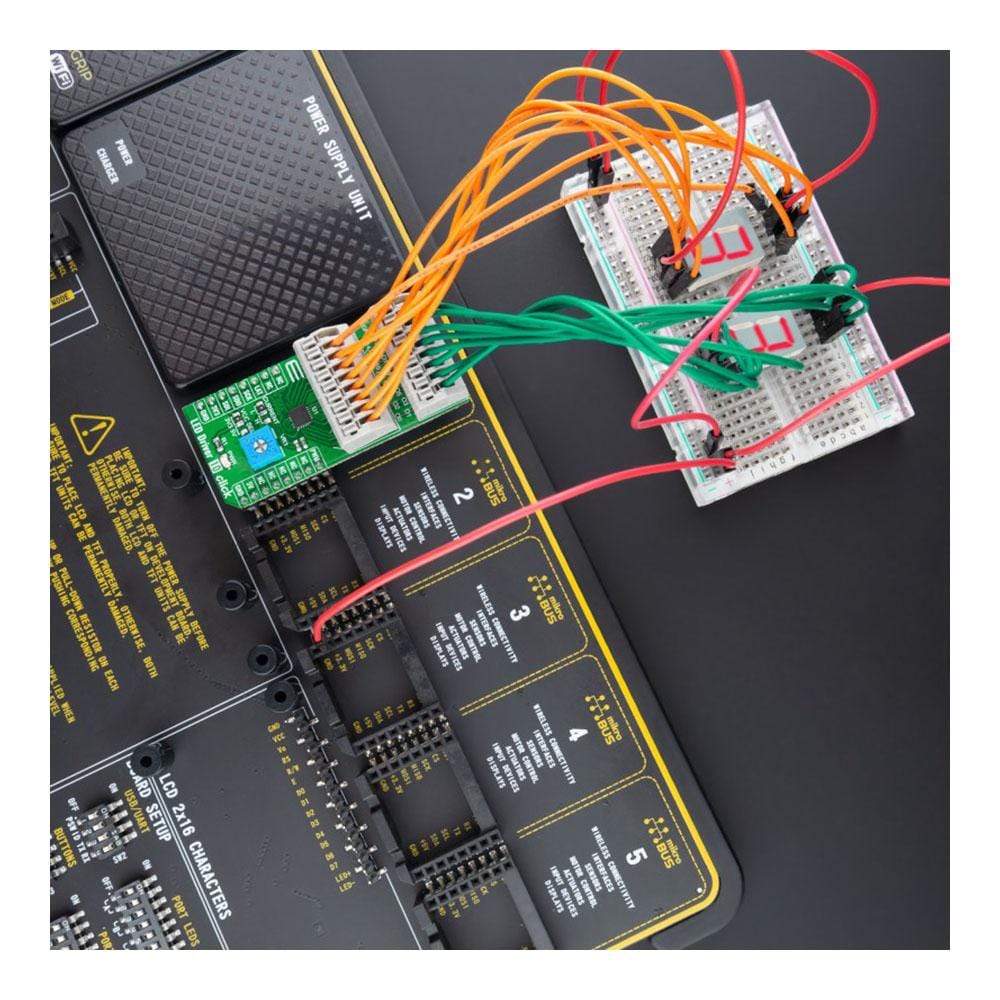
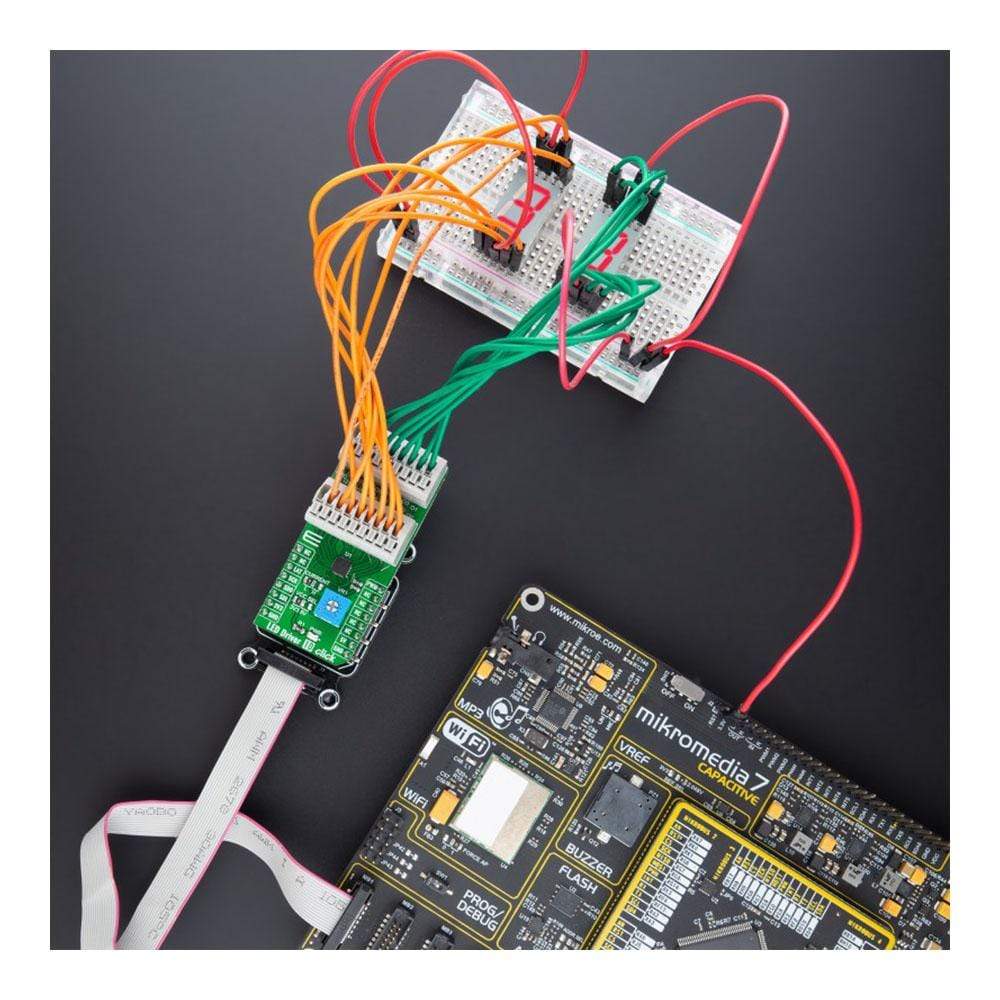
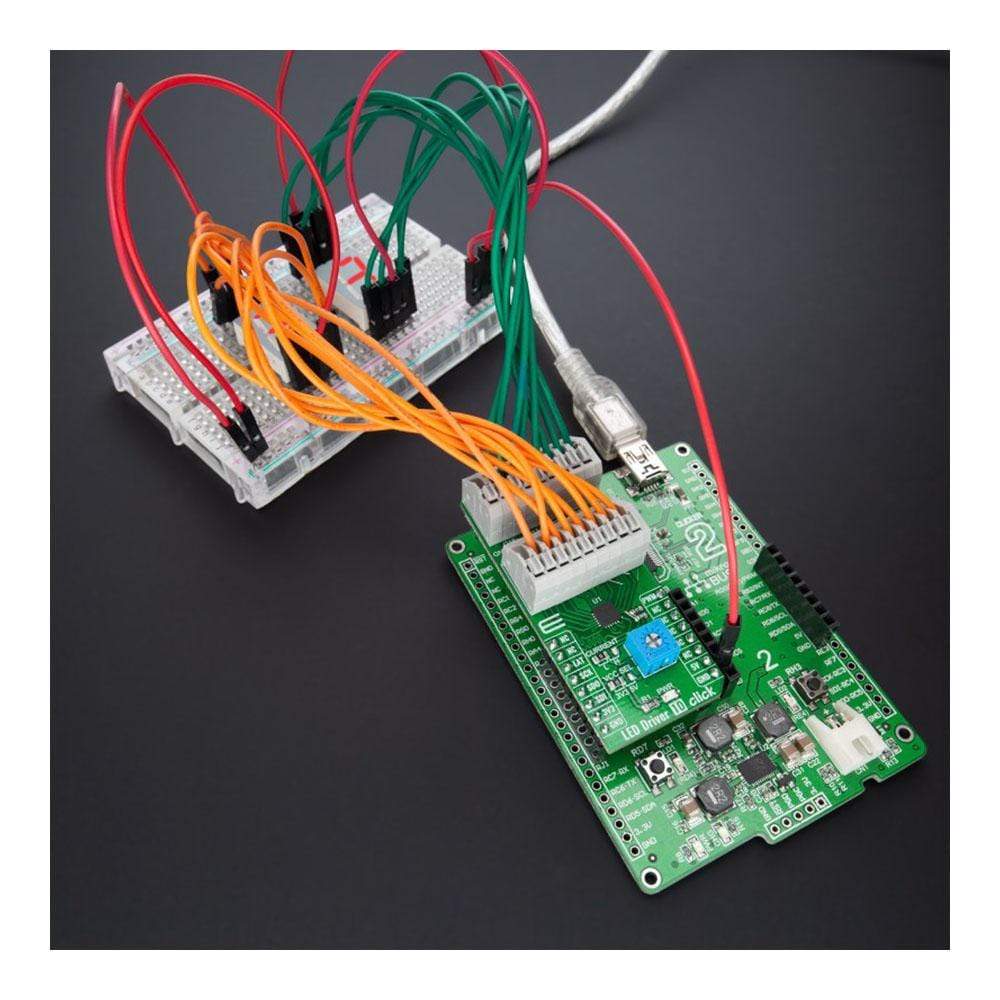
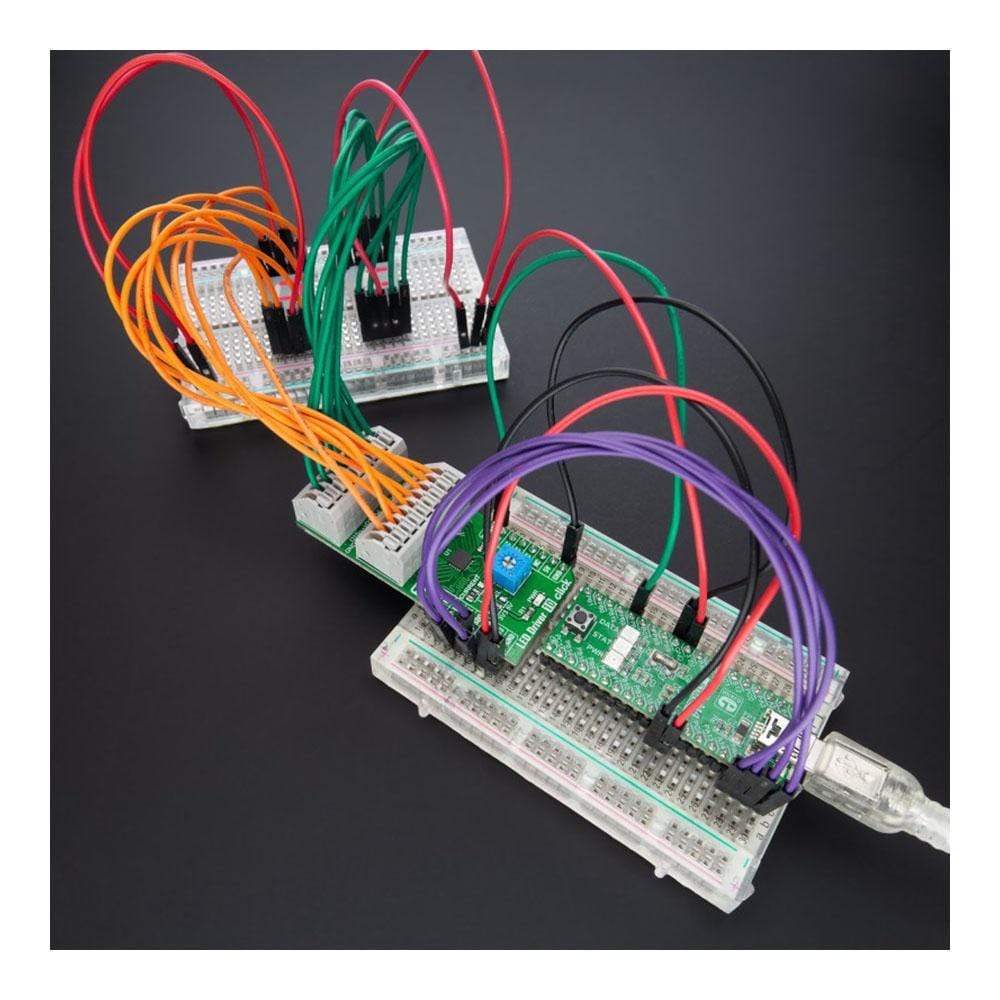
The LED Driver 10 Click Board™ is a compact add-on board that simplifies the control of multiple LEDs. This board features the TLC59283, a 16-channel, constant-current sink light-emitting diode (LED) driver with pre-charge FET from Texas Instruments. Each LED channel can be individually controlled with a simple SPI serial communication protocol compatible with both 3.3V or 5V logic levels. Each constant-current output has a pre-charge field-effect transistor that can reduce ghosting on the multiplexing drive LED display. It has additional features such as switching off all outputs via just one mikroBUS™ pin and setting the constant-current values on all 16 channels via one onboard potentiometer.
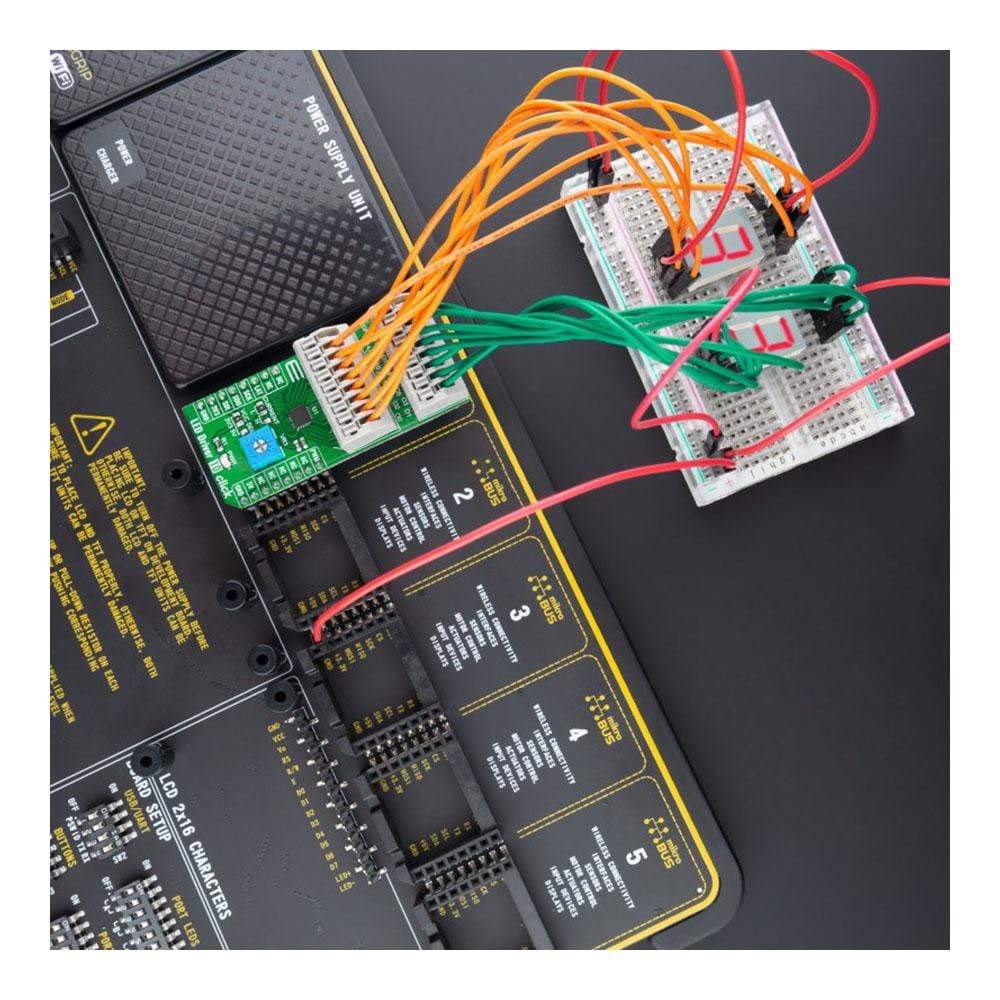
This LED Driver 10 Click Board™ is suitable for colour mixing and backlight application for amusement products, LED status signalization, home automation projects, and many more.
Downloads
Der LED-Treiber 10 Click Board™ ist eine kompakte Zusatzplatine, die die Steuerung mehrerer LEDs vereinfacht. Diese Platine verfügt über den TLC59283, einen 16-Kanal-Konstantstrom-LED-Treiber mit Vorlade-FET von Texas Instruments. Jeder LED-Kanal kann einzeln mit einem einfachen seriellen SPI-Kommunikationsprotokoll gesteuert werden, das sowohl mit 3,3-V- als auch mit 5-V-Logikpegeln kompatibel ist. Jeder Konstantstromausgang verfügt über einen Vorlade-Feldeffekttransistor, der Ghosting auf der LED-Anzeige des Multiplex-Treibers reduzieren kann. Es verfügt über zusätzliche Funktionen wie das Ausschalten aller Ausgänge über nur einen mikroBUS™-Pin und das Einstellen der Konstantstromwerte auf allen 16 Kanälen über ein integriertes Potentiometer.
Dieses LED Driver 10 Click Board™ eignet sich für Farbmischung und Hintergrundbeleuchtungsanwendungen für Unterhaltungsprodukte, LED-Statussignalisierung, Heimautomatisierungsprojekte und vieles mehr.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4787
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027383403
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.