




Mikroelektronika d.o.o.
Planche à clic Stepper 2
Planche à clic Stepper 2
SKU: MIKROE-1926
Impossible de charger la disponibilité du service de retrait

Overview
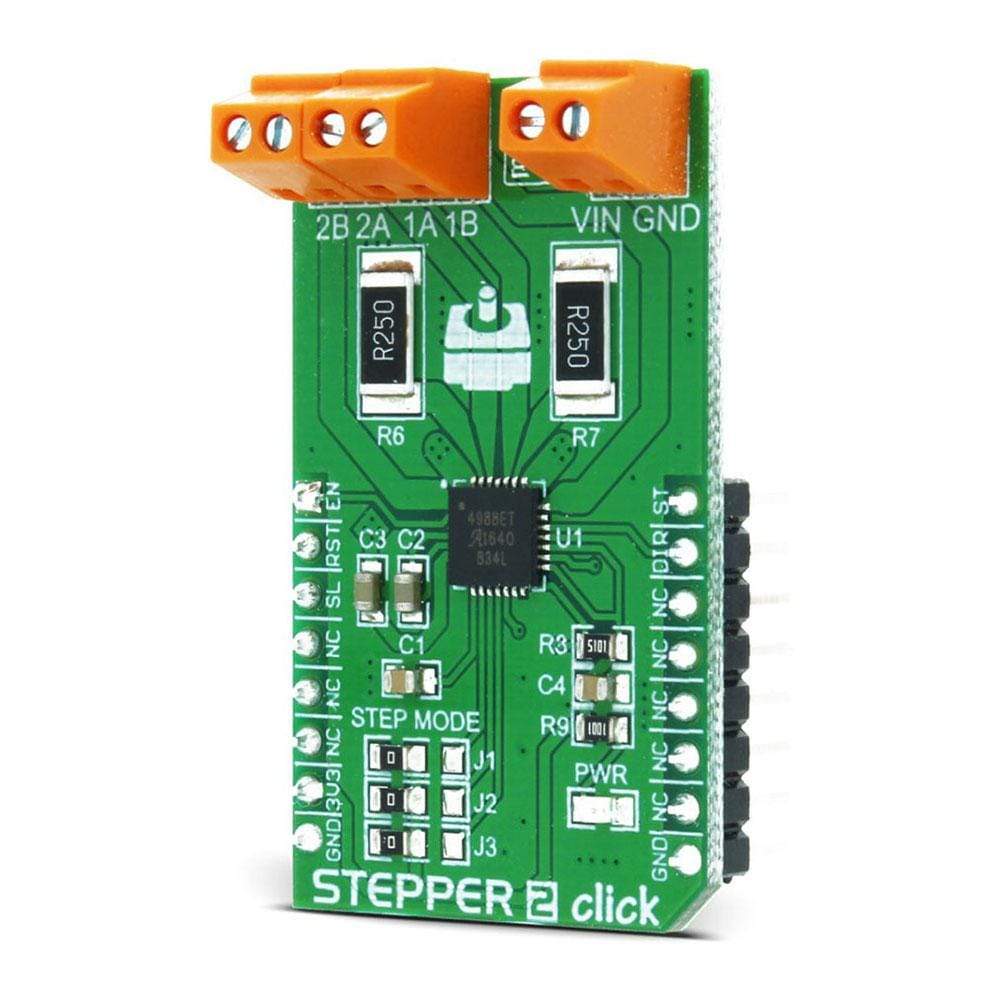
An improvement over its predecessor, the Stepper 2 Click Board™ from MikroE is another addition in the range of motor driver Click Boards™. Complete with an A4988 microstepping motor driver, the Stepper 2 Click Board™ surpasses the original Stepper Click Board™ with an output drive capability of up to 35V and 2A.
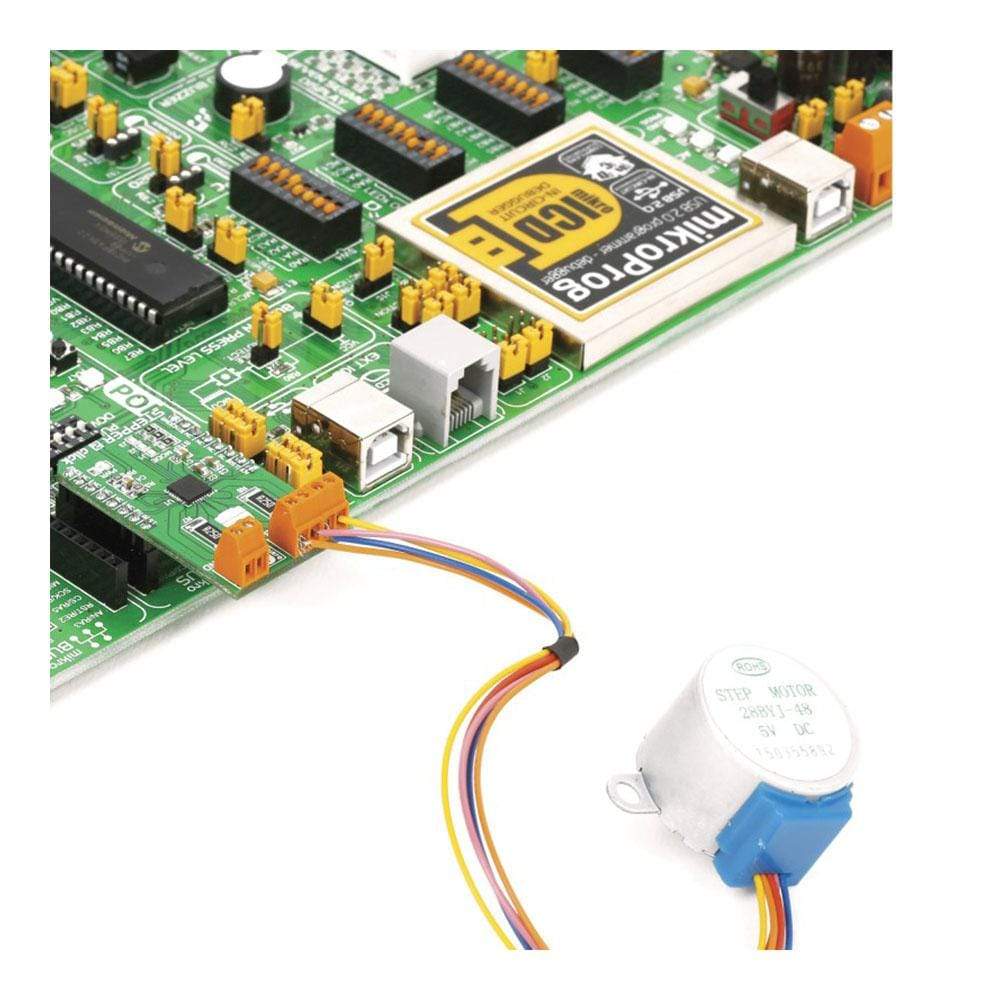
Not just power, the new version is designed to offer users more control (precision). It can go down to 1/16th of a step to drive the motor. The board features three pairs of onboard screw terminals for secure connectivity. The first two (2B, 2A; 1A, 1B) are for connecting the motor while the third pair (VIN and GND) is for an external power supply (minimum 7V).
The Stepper 2 Click Board™ is intended to operate bipolar stepper motors in full-, half-, quarter-, eighth-, and sixteenth-step modes. The user can select between the different stepping modes (steps and micro-steps) using a set of three (J1-J3) onboard jumpers. Stepper 2 Click Board™ uses MikroBUS EN, RST, SL, ST and DIR pins to communicate with the target board microcontroller. It is designed to work with a 3.3V power supply but is also compatible with a 5V logic level.
Downloads
Amélioration par rapport à son prédécesseur, le Stepper 2 Click Board™ de MikroE est un nouvel ajout à la gamme de cartes Click Boards™ pour pilotes de moteur. Equipé d'un pilote de moteur à micropas A4988, le Stepper 2 Click Board™ surpasse le Stepper Click Board™ d'origine avec une capacité de sortie allant jusqu'à 35 V et 2 A.
La nouvelle version n'est pas seulement une question de puissance, elle est également conçue pour offrir aux utilisateurs plus de contrôle (précision). Elle peut descendre jusqu'à 1/16ème de pas pour piloter le moteur. La carte est dotée de trois paires de bornes à vis intégrées pour une connectivité sécurisée. Les deux premières (2B, 2A ; 1A, 1B) servent à connecter le moteur tandis que la troisième paire (VIN et GND) est destinée à une alimentation externe (minimum 7 V).
La carte Stepper 2 Click Board™ est conçue pour faire fonctionner des moteurs pas à pas bipolaires en modes pas complet, demi-pas, quart, huitième et seizième de pas. L'utilisateur peut choisir entre les différents modes de pas (pas et micro-pas) à l'aide d'un ensemble de trois cavaliers intégrés (J1-J3). La carte Stepper 2 Click Board™ utilise les broches MikroBUS EN, RST, SL, ST et DIR pour communiquer avec le microcontrôleur de la carte cible. Elle est conçue pour fonctionner avec une alimentation 3,3 V mais est également compatible avec un niveau logique 5 V.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-1926
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.028 kg
|
| Other | |
EAN |
8606015076997
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.