
Mikroelektronika d.o.o.
Podomètre 3 Click Board
Podomètre 3 Click Board
SKU: MIKROE-3259
Impossible de charger la disponibilité du service de retrait
Overview
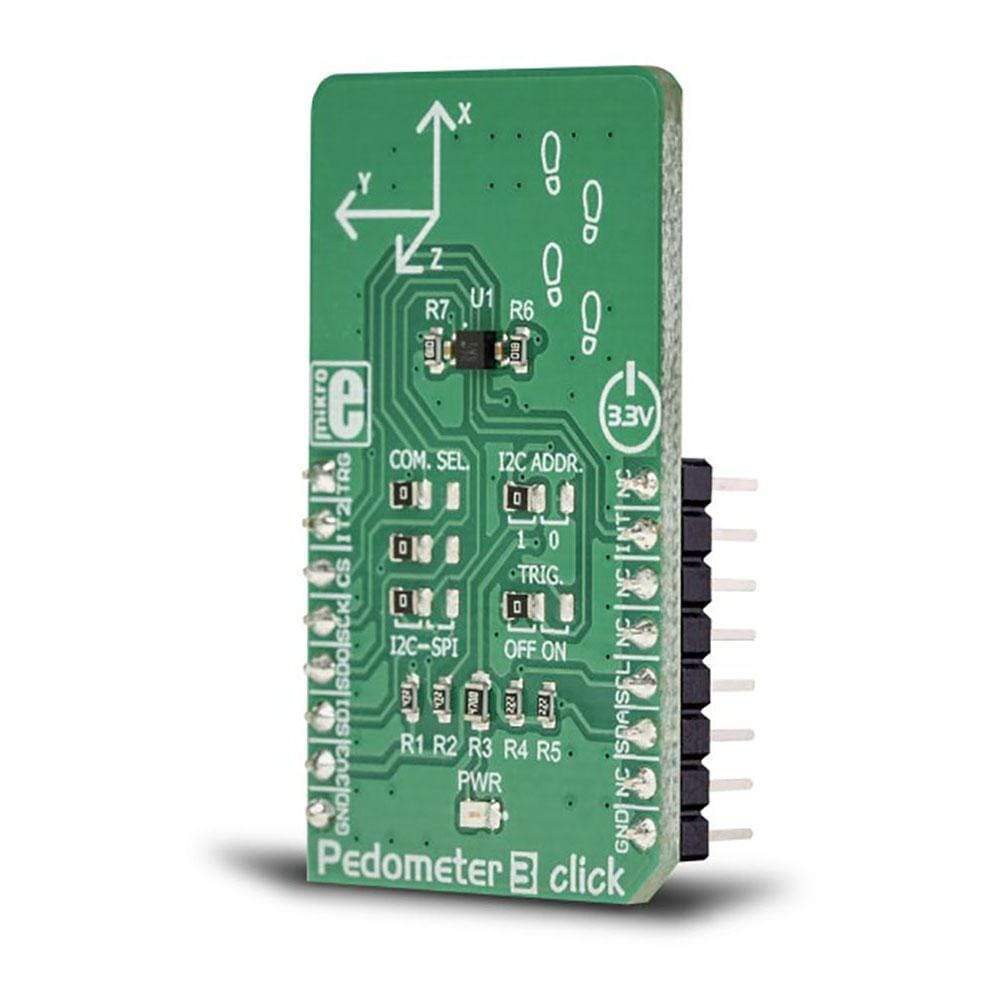
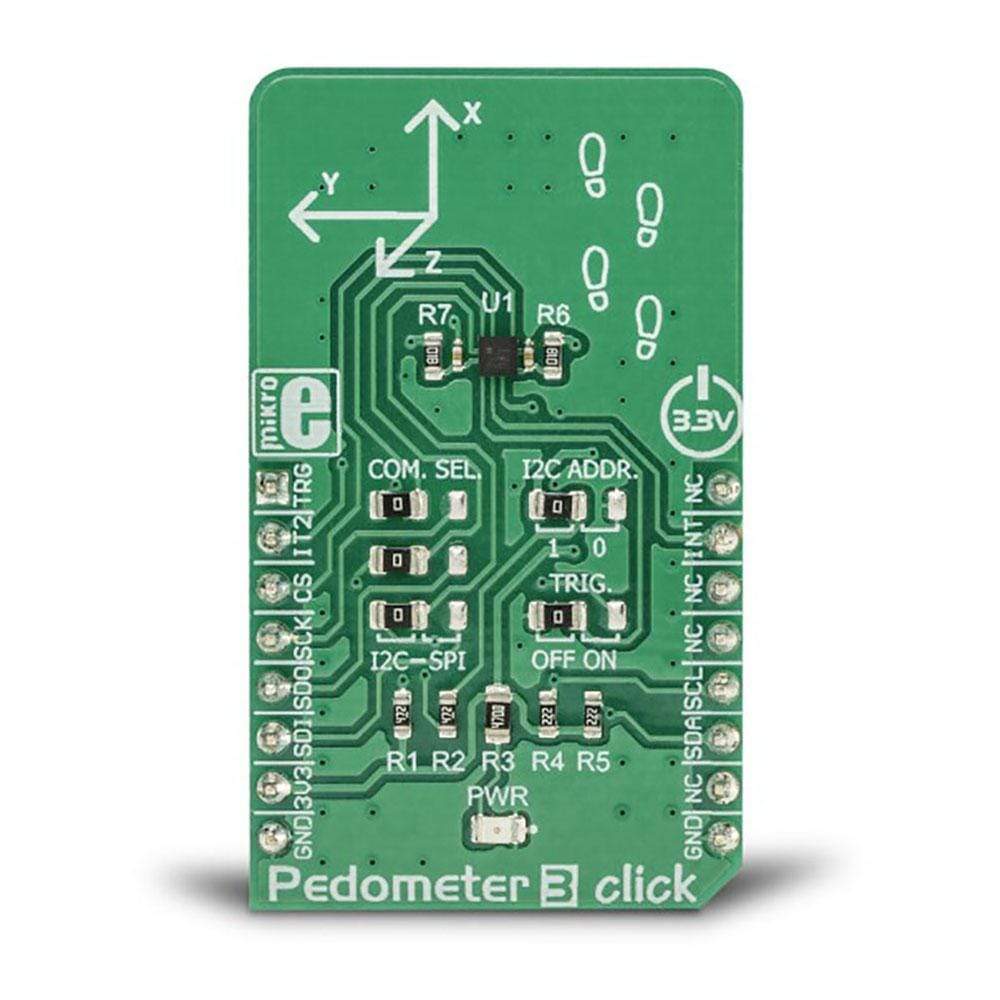
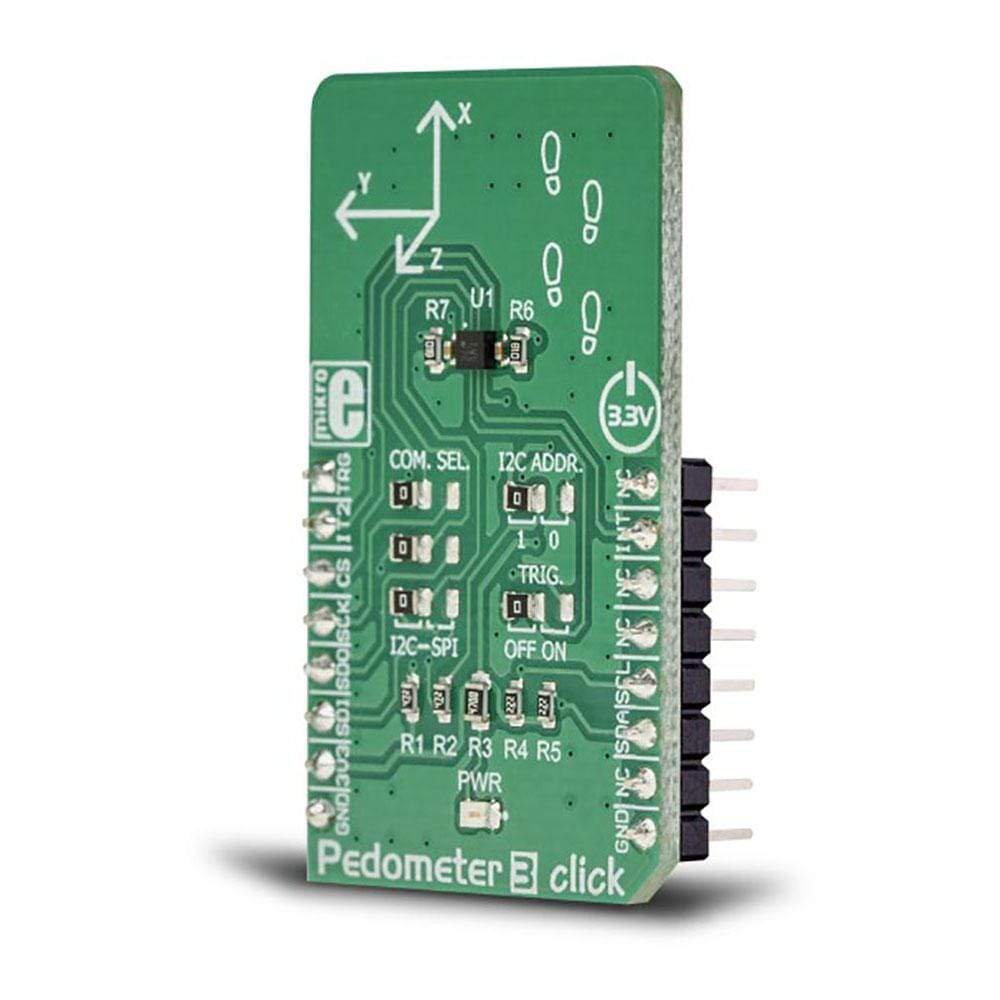
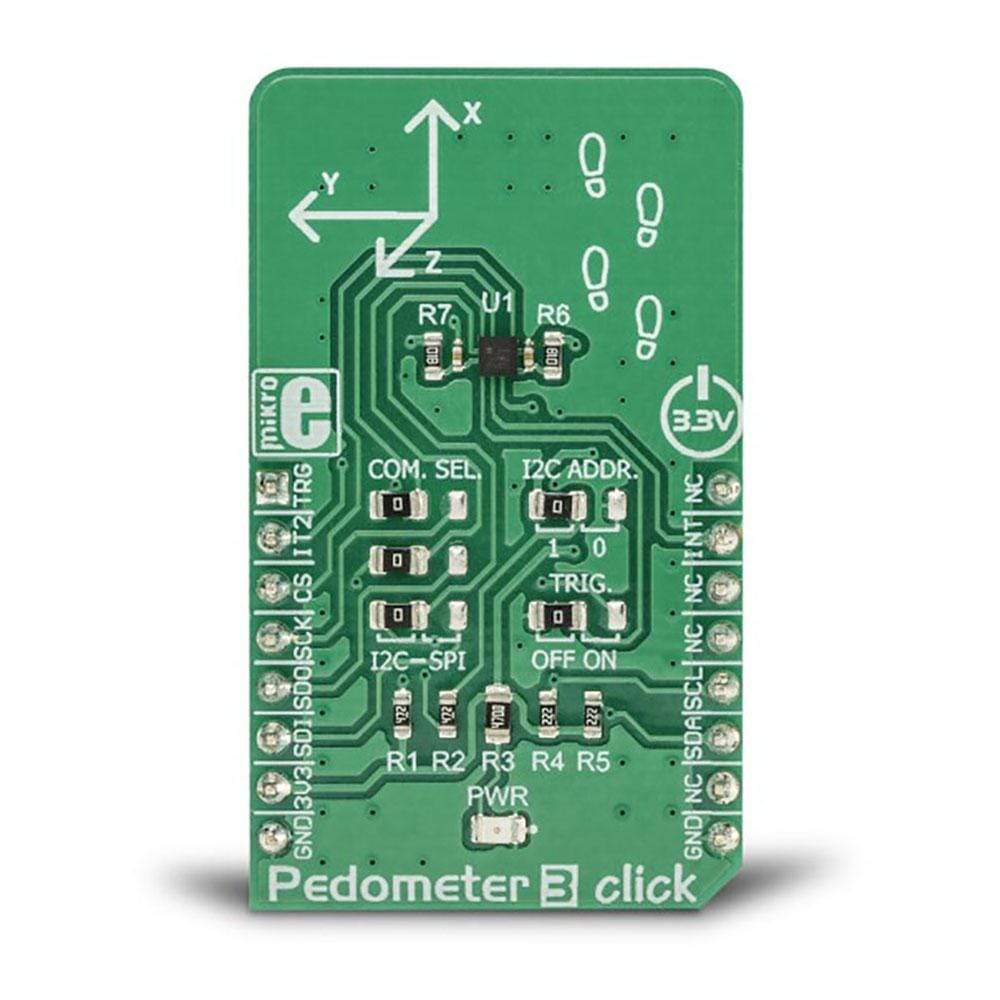
The Pedometer 3 Click Board™ is an acceleration sensing and step counting Click Board™ equipped with the KX126-1063, an advanced tri-axis acceleration sensor IC, which features several acceleration detection algorithms, including a pedometer. The micro-electromechanical sensor (MEMS) element itself is based on the principle of measuring the differential capacitance, which further decreases errors due to manufacturing imperfections and temperature. The MEMS element is coupled with a very sophisticated application-specific IC (ASIC), which offers many advanced features, such as the 2048-byte FIFO buffer, pedometer algorithms, tap, and double tap sensing algorithms, free fall algorithms, tilt single/double pole IIR filtering, and more.
It comes in the package which also includes the mikroSDK software and a library with all the functions. The Pedometer 3 Click Board™ comes as a fully tested and approved prototype, making it a reliable device ready to use on the development board.
Downloads
Le Pedometer 3 Click Board™ est un Click Board™ de détection d'accélération et de comptage de pas équipé du KX126-1063, un circuit intégré de capteur d'accélération tri-axe avancé, qui comprend plusieurs algorithmes de détection d'accélération, dont un podomètre. L'élément de capteur microélectromécanique (MEMS) lui-même est basé sur le principe de mesure de la capacité différentielle, ce qui réduit encore les erreurs dues aux imperfections de fabrication et à la température. L'élément MEMS est couplé à un circuit intégré spécifique à l'application (ASIC) très sophistiqué, qui offre de nombreuses fonctionnalités avancées, telles que le tampon FIFO de 2048 octets, les algorithmes de podomètre, les algorithmes de détection de tap et de double tap, les algorithmes de chute libre, le filtrage IIR à pôle simple/double d'inclinaison, et bien plus encore.
Il est livré dans un package qui comprend également le logiciel mikroSDK et une bibliothèque avec toutes les fonctions. Le Pedometer 3 Click Board™ est livré sous la forme d'un prototype entièrement testé et approuvé, ce qui en fait un appareil fiable prêt à être utilisé sur la carte de développement.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3259
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606018714001
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.