


Mikroelektronika d.o.o.
Carte Brushless 20 Click
Carte Brushless 20 Click
SKU: MIKROE-5294
Impossible de charger la disponibilité du service de retrait


Key Features
Overview
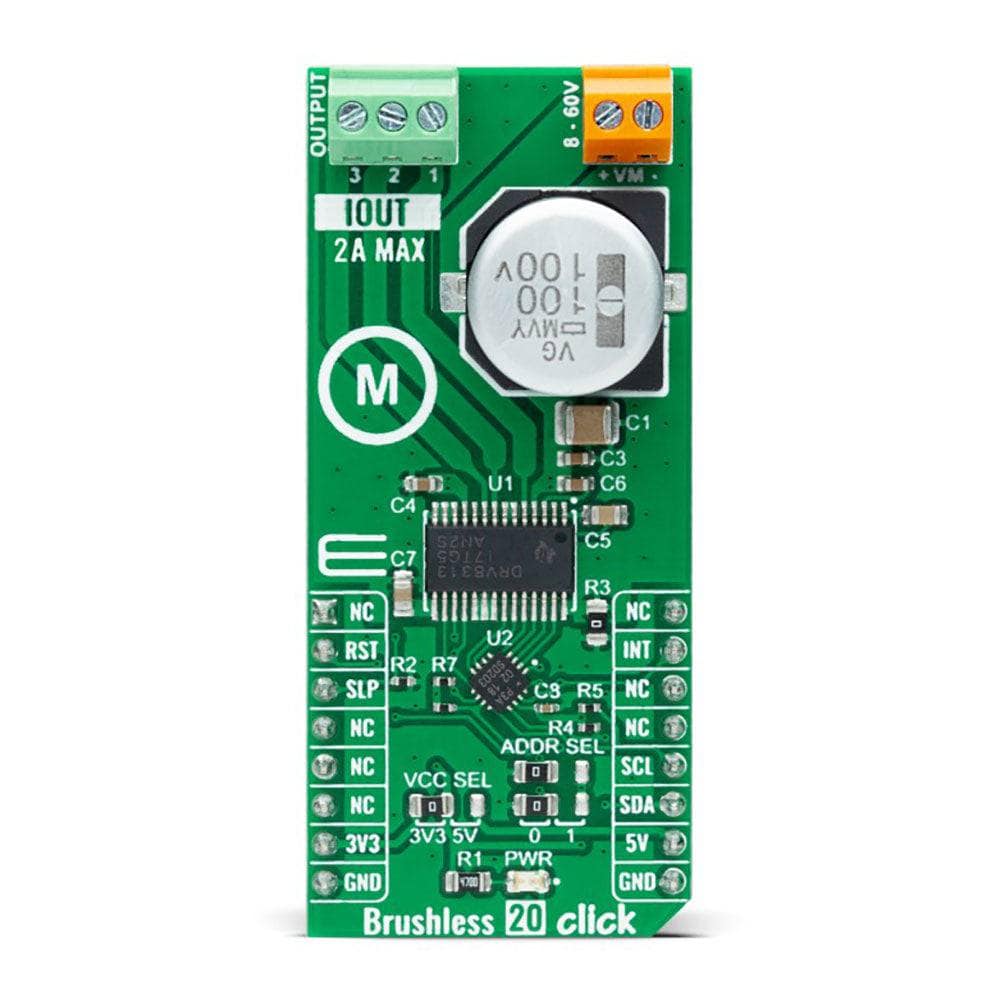
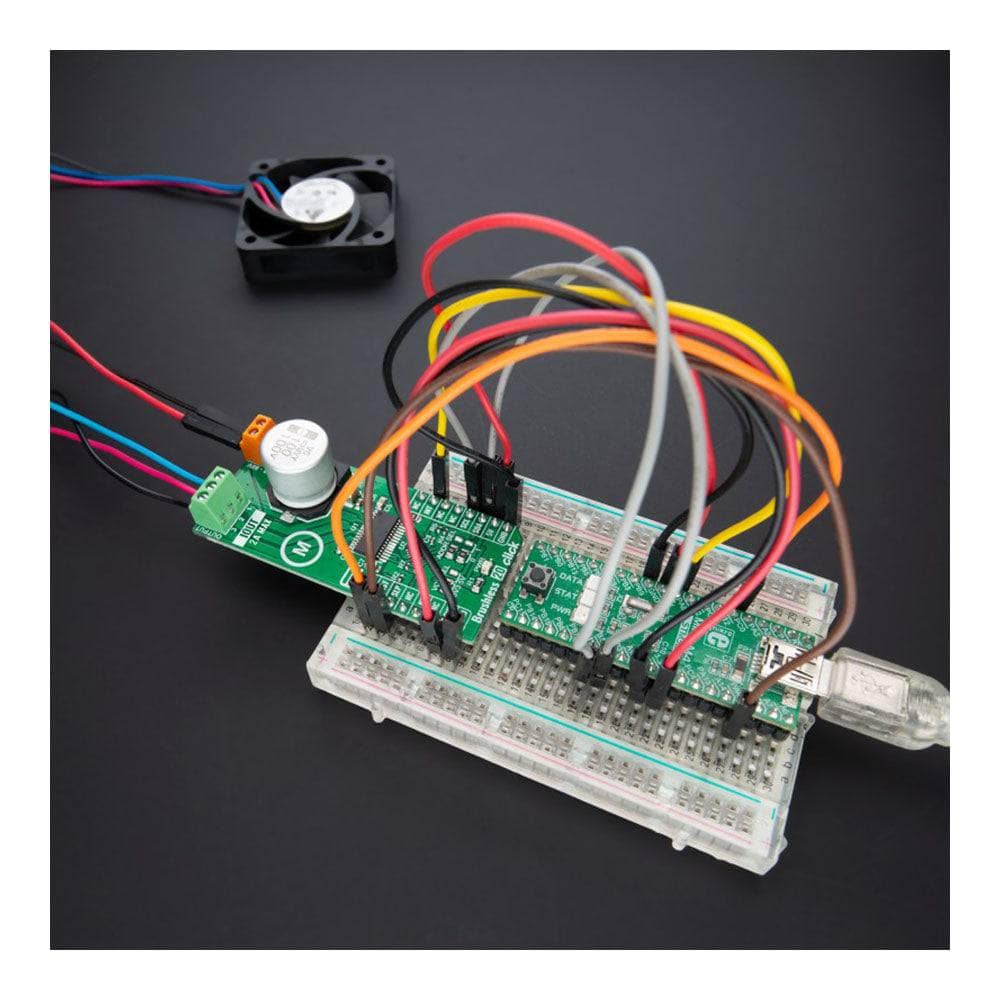
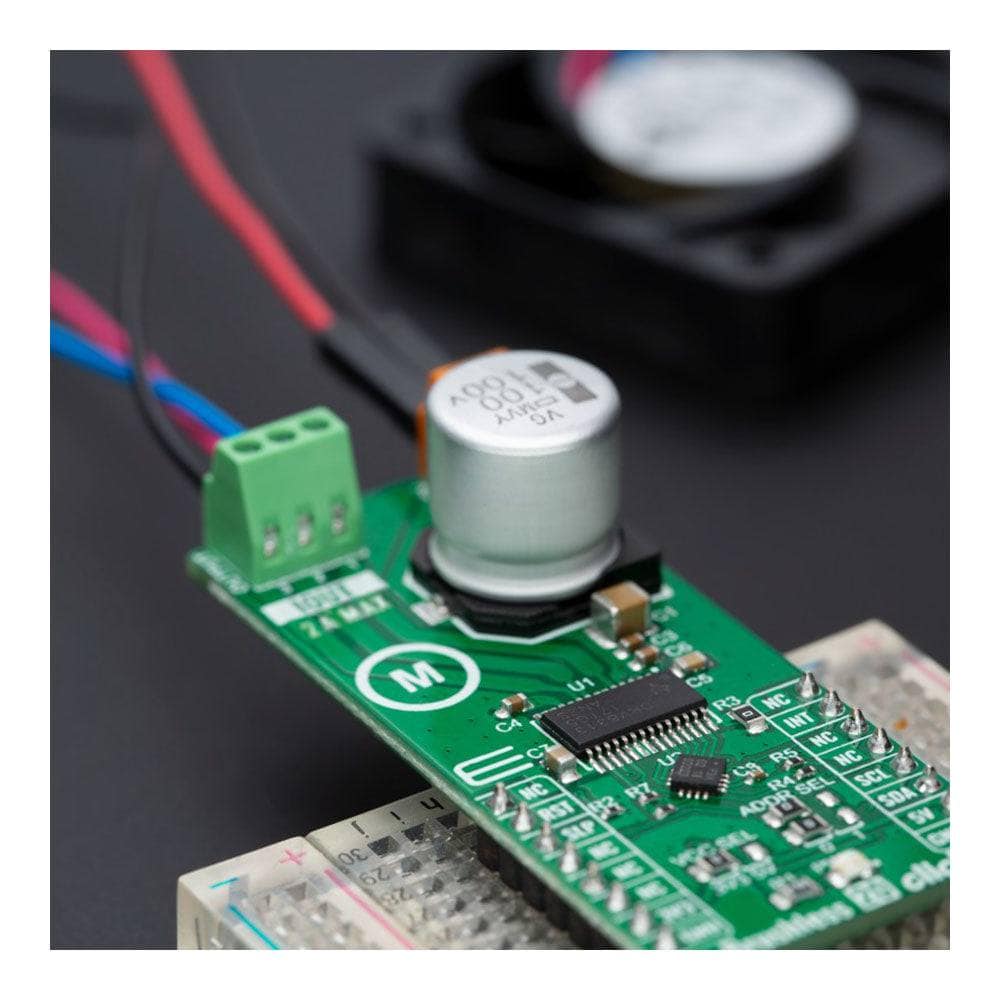
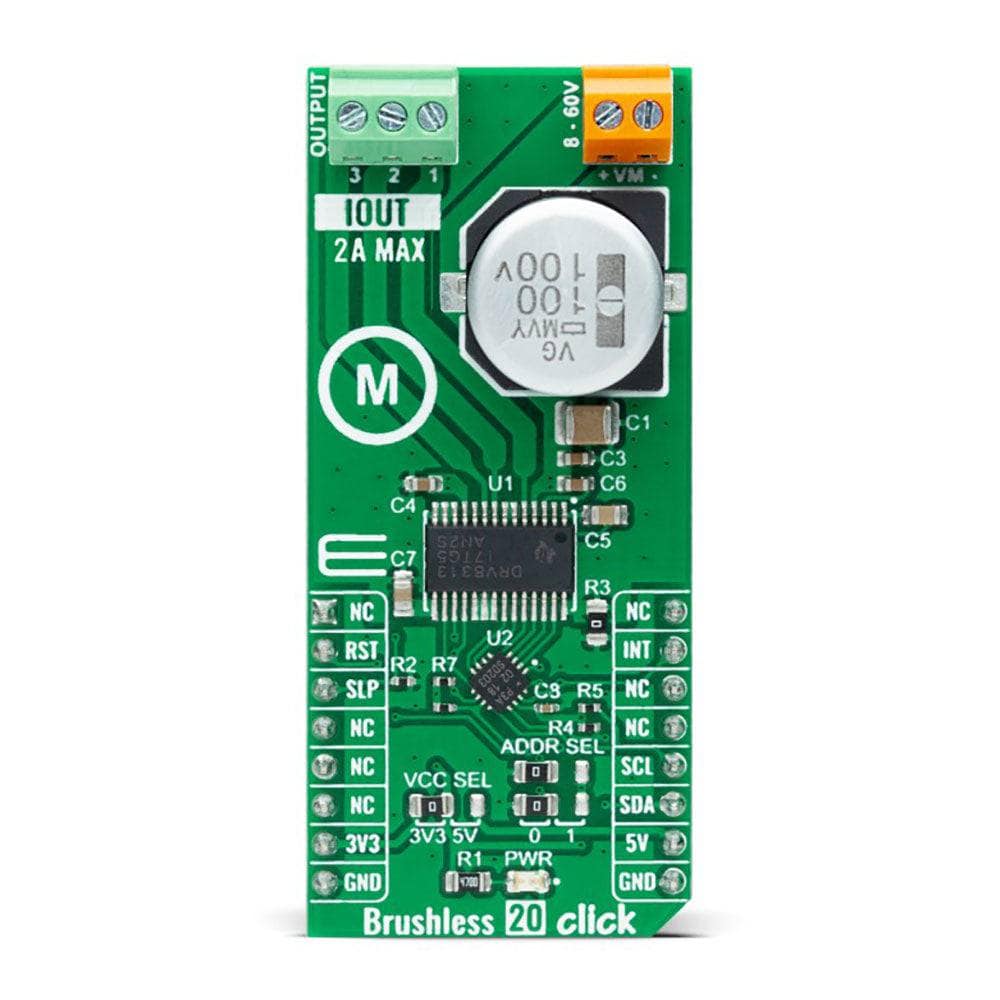
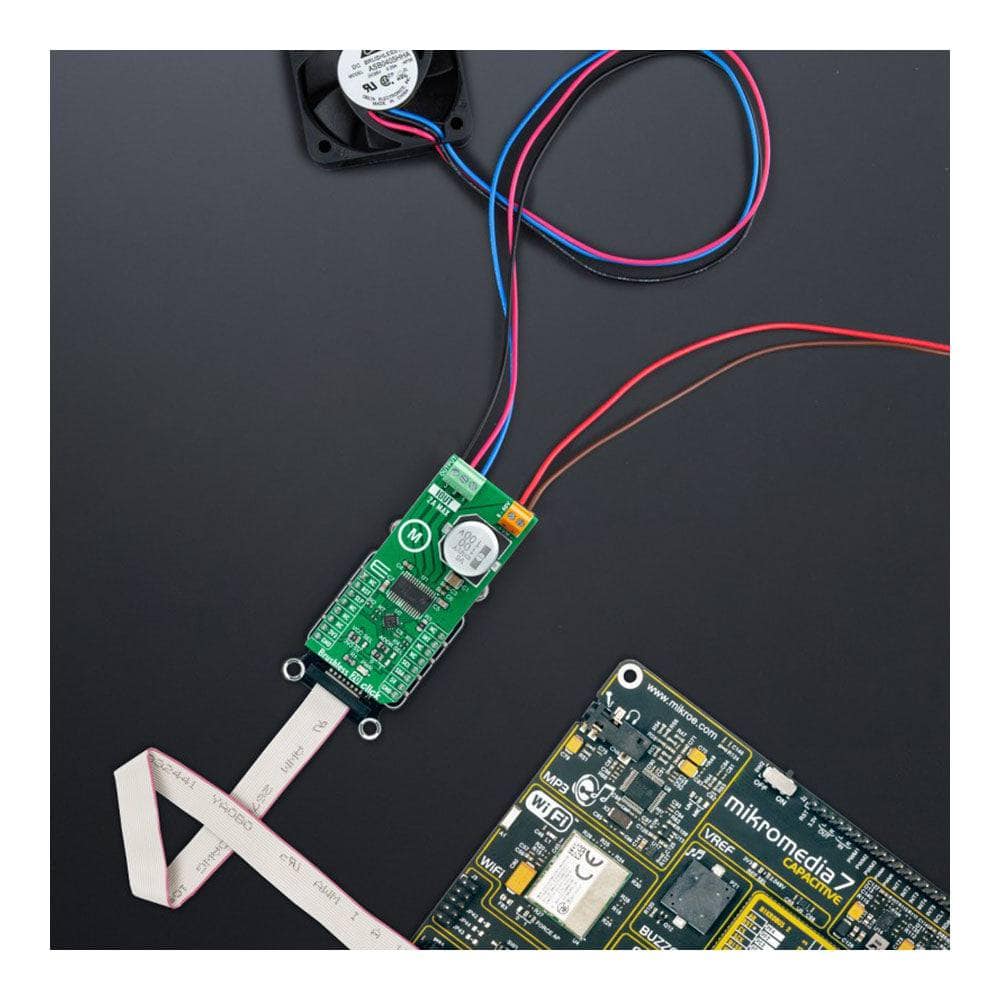
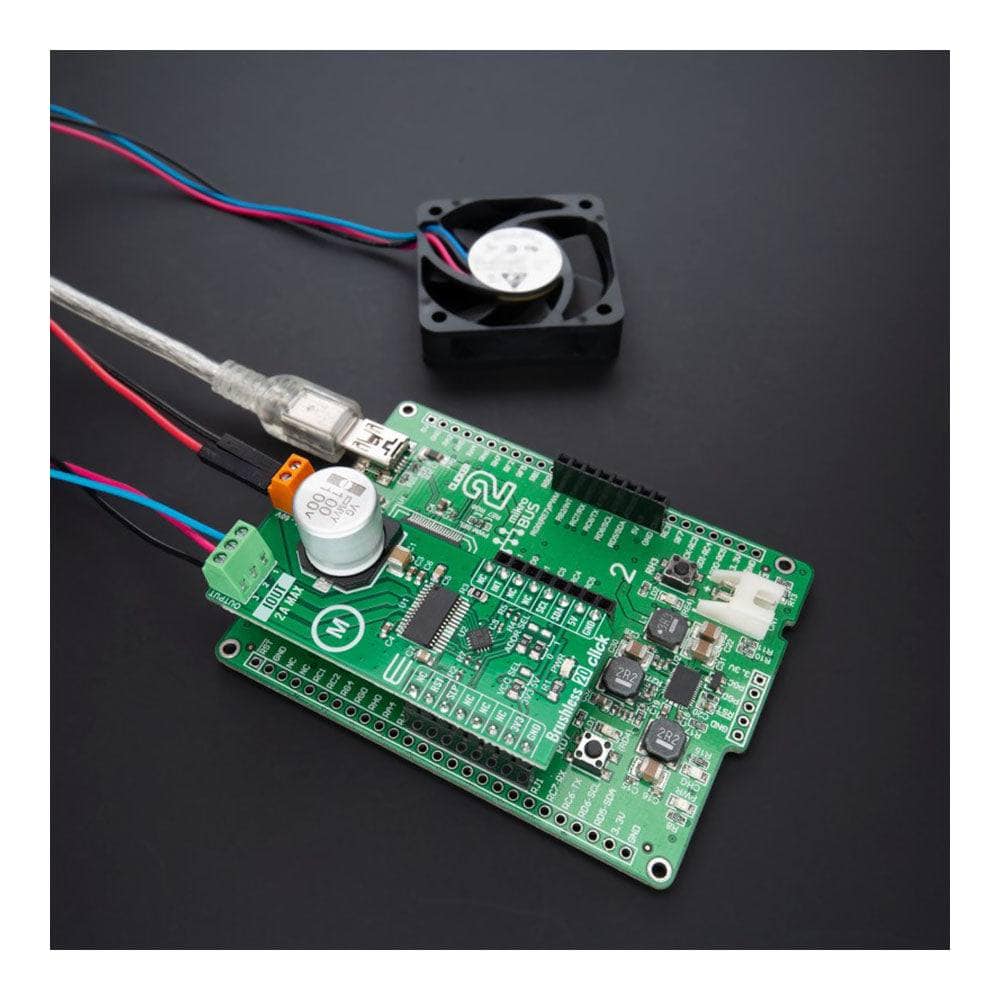
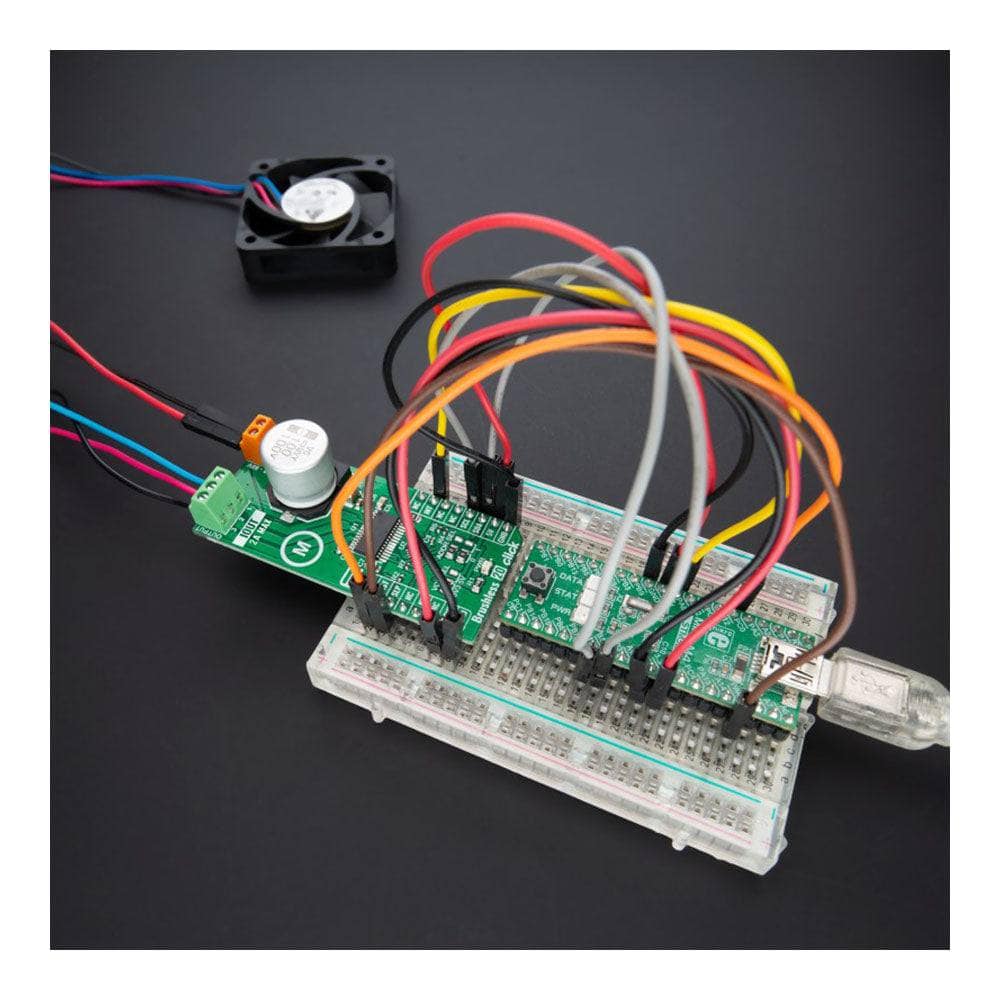
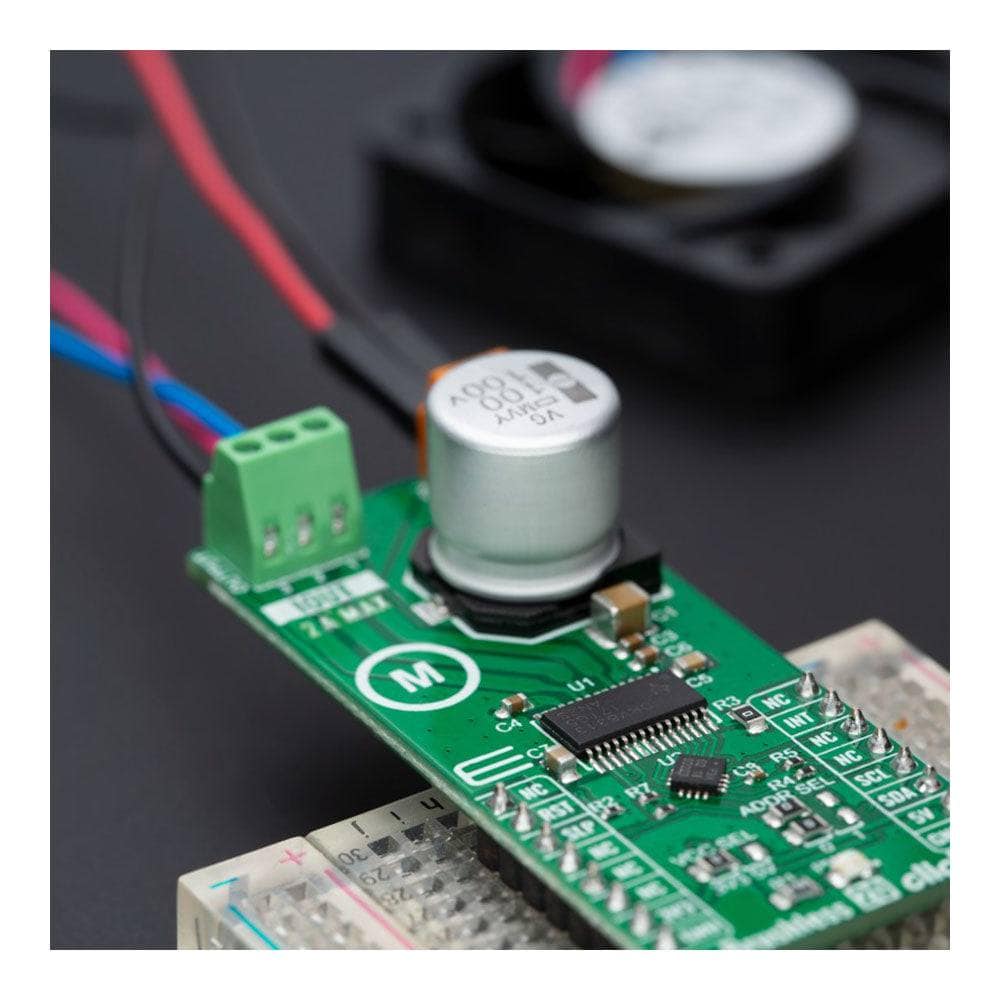
The Brushless 20 Click Board™ is a compact add-on board that controls brushless DC (BLDC) motors with any MCU. This board features the DRV8313, a fully integrated three-phase BLDC motor driver from Texas Instruments. It provides three individually controllable half-H-bridge drivers intended to drive a three-phase BLDC motor, solenoids, or other loads. Each output driver channel consists of N-channel power MOSFETs configured in a 1/2-H-bridge configuration. Besides, it has a wide operating voltage range from 8V to 60V, alongside several built-in protection circuits such as under-voltage, charge pump faults, overcurrent, and over-temperature. This Click board™ makes the perfect solution for driving three-phase brushless DC motors up to 2A output current rating.
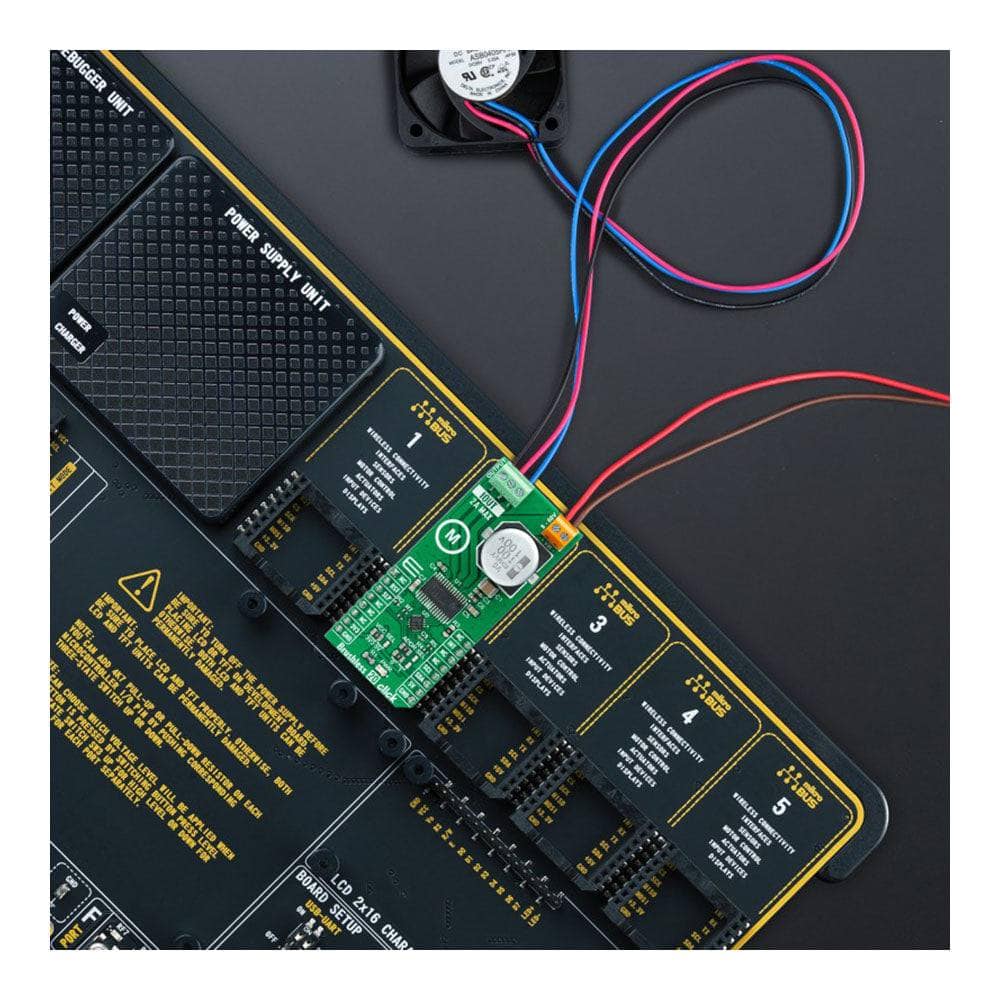
The Brushless 20 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
La carte Click Board™ Brushless 20 est une carte complémentaire compacte qui contrôle les moteurs à courant continu sans balais (BLDC) avec n'importe quel microcontrôleur. Cette carte comprend le DRV8313, un pilote de moteur BLDC triphasé entièrement intégré de Texas Instruments. Il fournit trois pilotes de pont en demi-H contrôlables individuellement destinés à piloter un moteur BLDC triphasé, des solénoïdes ou d'autres charges. Chaque canal de pilote de sortie se compose de MOSFET de puissance à canal N configurés dans une configuration de pont en demi-H. En outre, il dispose d'une large plage de tension de fonctionnement de 8 V à 60 V, ainsi que de plusieurs circuits de protection intégrés tels que la sous-tension, les défauts de pompe de charge, la surintensité et la surchauffe. Cette carte Click™ constitue la solution parfaite pour piloter des moteurs à courant continu sans balais triphasés jusqu'à un courant de sortie nominal de 2 A.
La carte Click Board™ Brushless 20 est supportée par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette carte Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-5294
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027387913
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.