



Mikroelektronika d.o.o.
Tableau à clic Haptic 3
Tableau à clic Haptic 3
SKU: MIKROE-5087
Impossible de charger la disponibilité du service de retrait



Overview
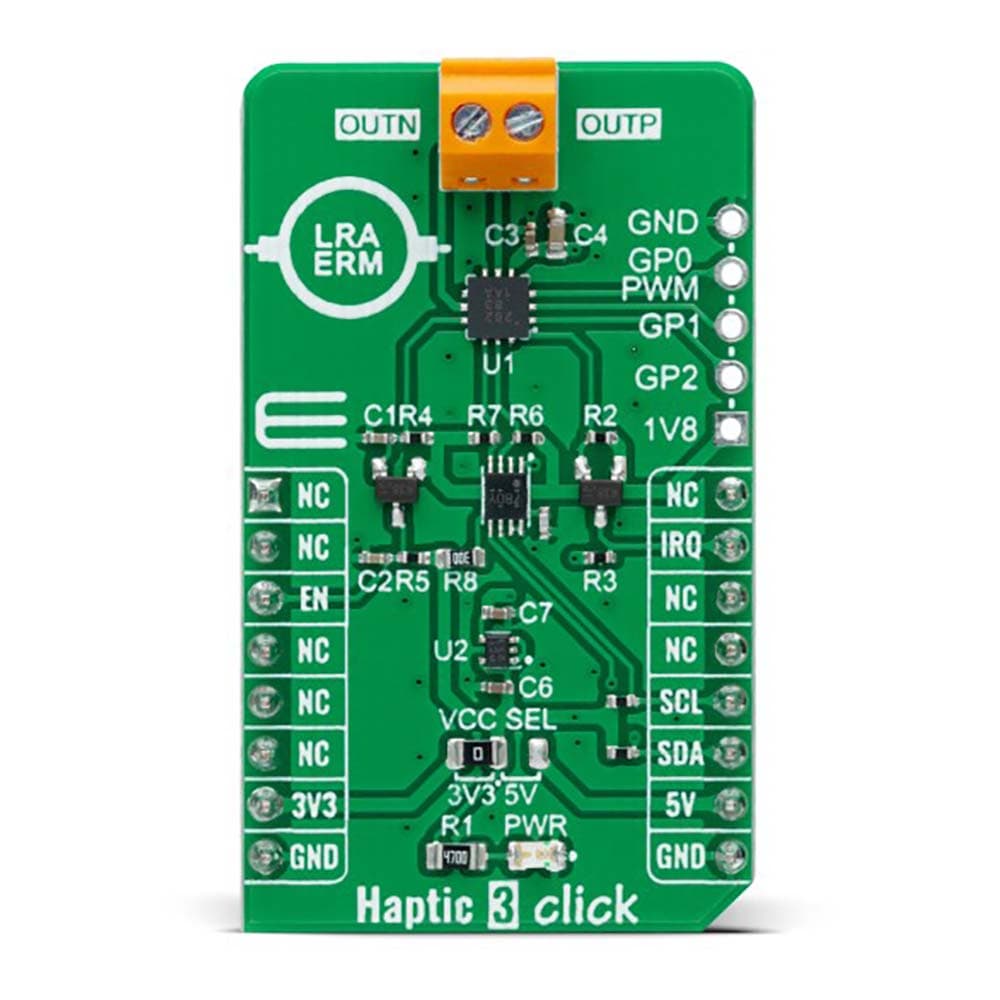
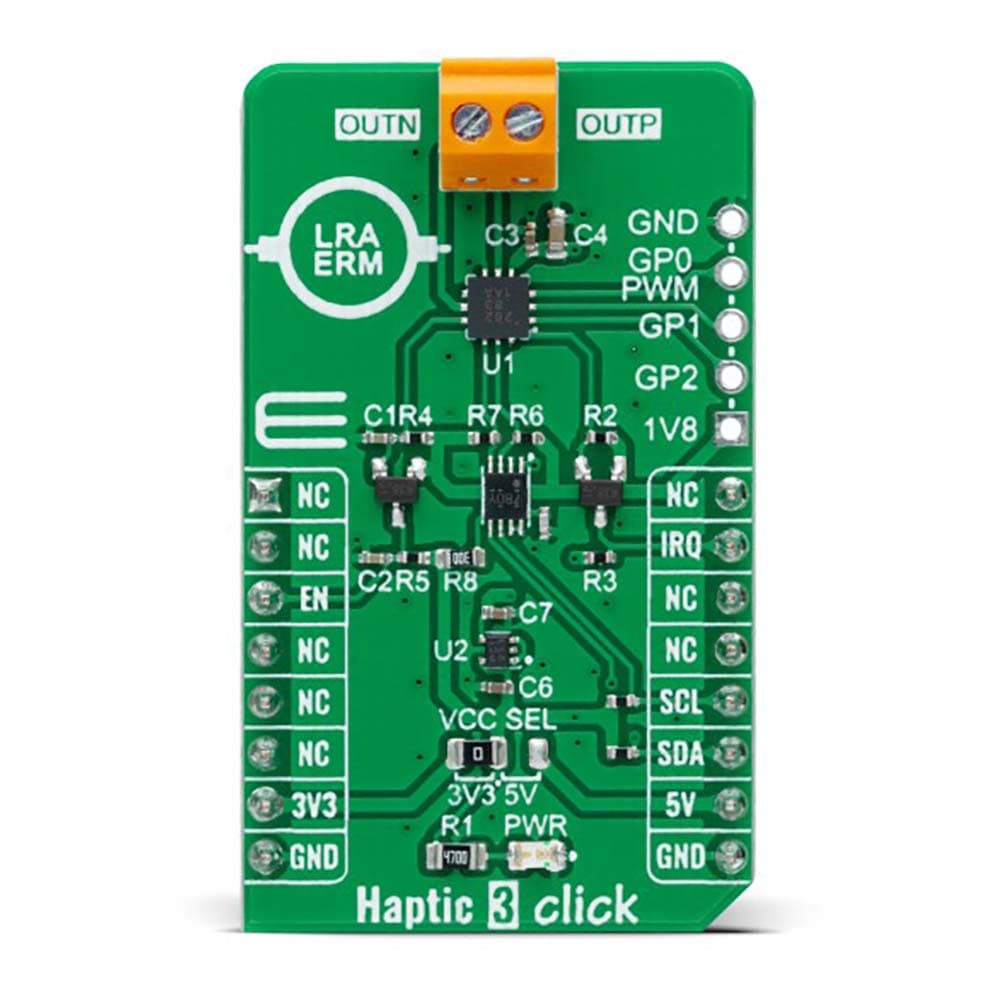
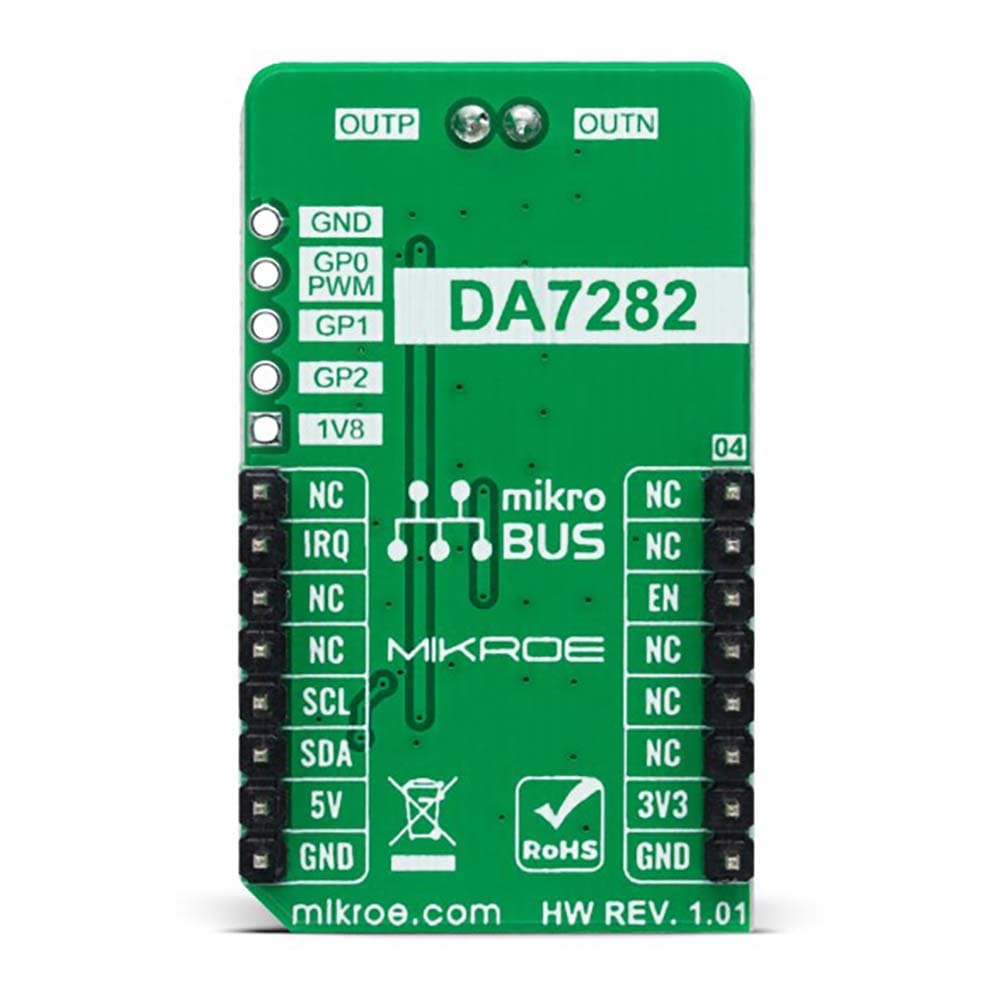
The Haptic 3 Click Board™ is a compact add-on board that uses advanced vibration patterns and waveforms to convey information to a user. This board features the DA7282, a linear resonant actuator (LRA), and an eccentric rotating mass (ERM) haptic driver from Dialog Semiconductor. The DA7282 features LRA or ERM drive capability with automatic closed-loop LRA resonant frequency tracking, guaranteeing consistency across LRA production tolerances. It also offers wideband operation that fully utilizes the capabilities of newer wideband and multi-directional LRAs, alongside three external general-purpose inputs for triggering up to six independent haptic sequences. This Click board™ is suitable for numerous everyday applications such as indicator systems, training equipment/simulators with haptics function, robotics and mechatronics, and more.
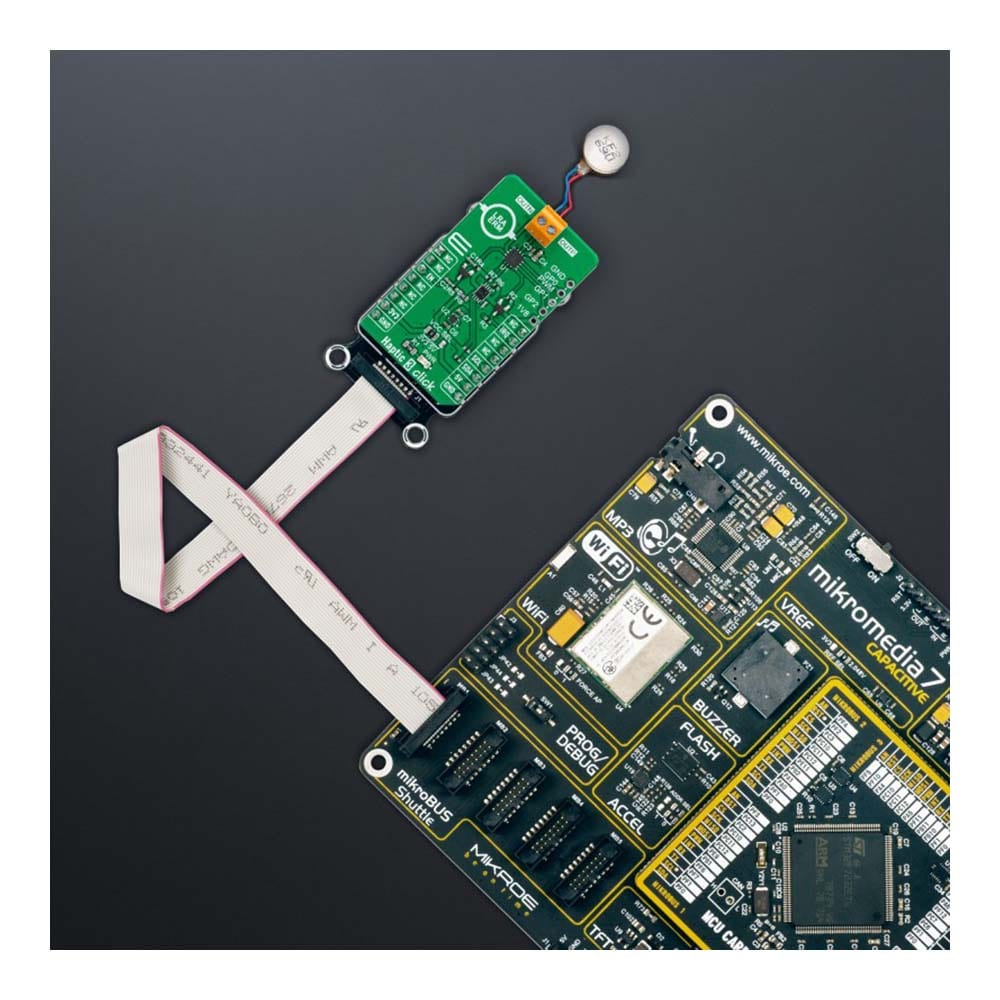
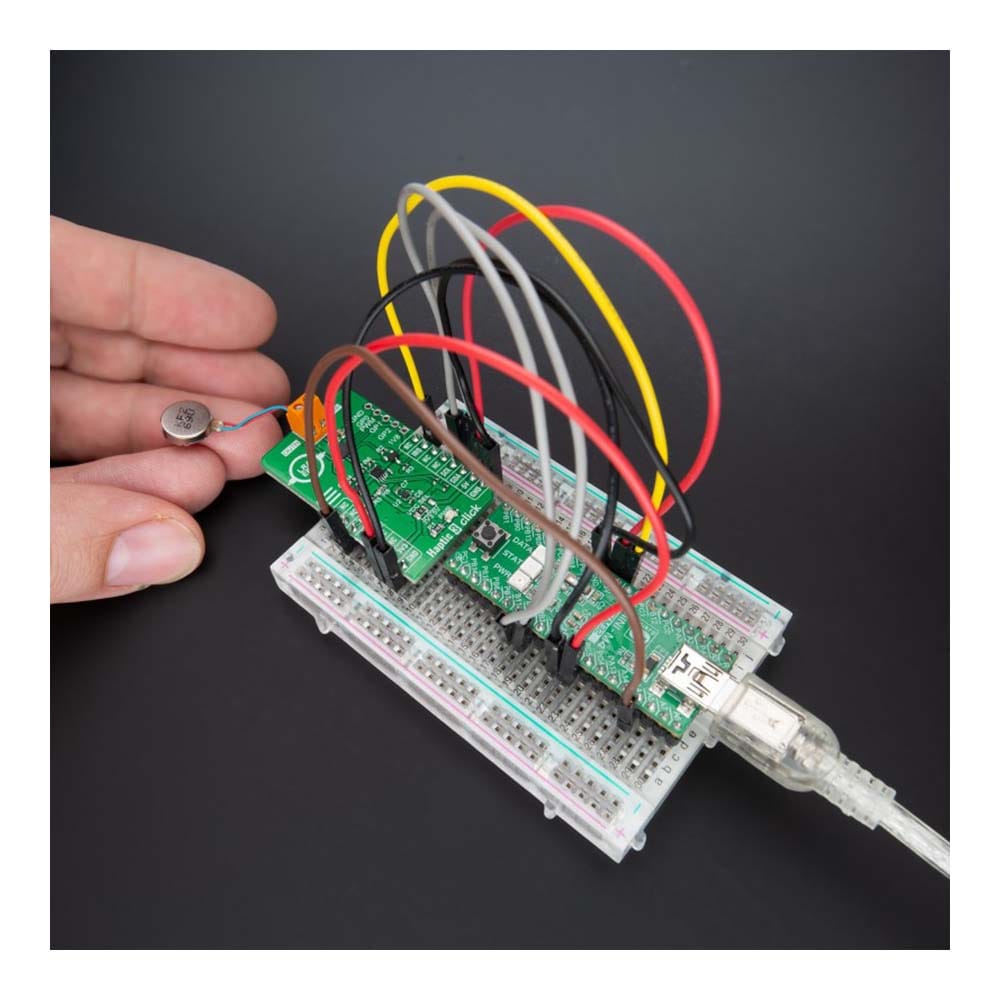
The Haptic 3 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Le Haptic 3 Click Board™ est une carte complémentaire compacte qui utilise des modèles de vibration et des formes d'onde avancés pour transmettre des informations à un utilisateur. Cette carte comprend le DA7282, un actionneur résonant linéaire (LRA) et un pilote haptique à masse rotative excentrique (ERM) de Dialog Semiconductor. Le DA7282 est doté d'une capacité de pilotage LRA ou ERM avec suivi automatique de la fréquence de résonance LRA en boucle fermée, garantissant la cohérence entre les tolérances de production LRA. Il offre également un fonctionnement à large bande qui utilise pleinement les capacités des LRA à large bande et multidirectionnels plus récents, ainsi que trois entrées externes à usage général pour déclencher jusqu'à six séquences haptiques indépendantes. Ce Click board™ convient à de nombreuses applications quotidiennes telles que les systèmes d'indicateurs, les équipements/simulateurs de formation avec fonction haptique, la robotique et la mécatronique, etc.
Le Haptic 3 Click Board™ est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Ce Click board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-5087
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027389016
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.