


Mikroelektronika d.o.o.
Carte Brushless 22 Click
Carte Brushless 22 Click
SKU: MIKROE-4995
Impossible de charger la disponibilité du service de retrait



Key Features
Overview
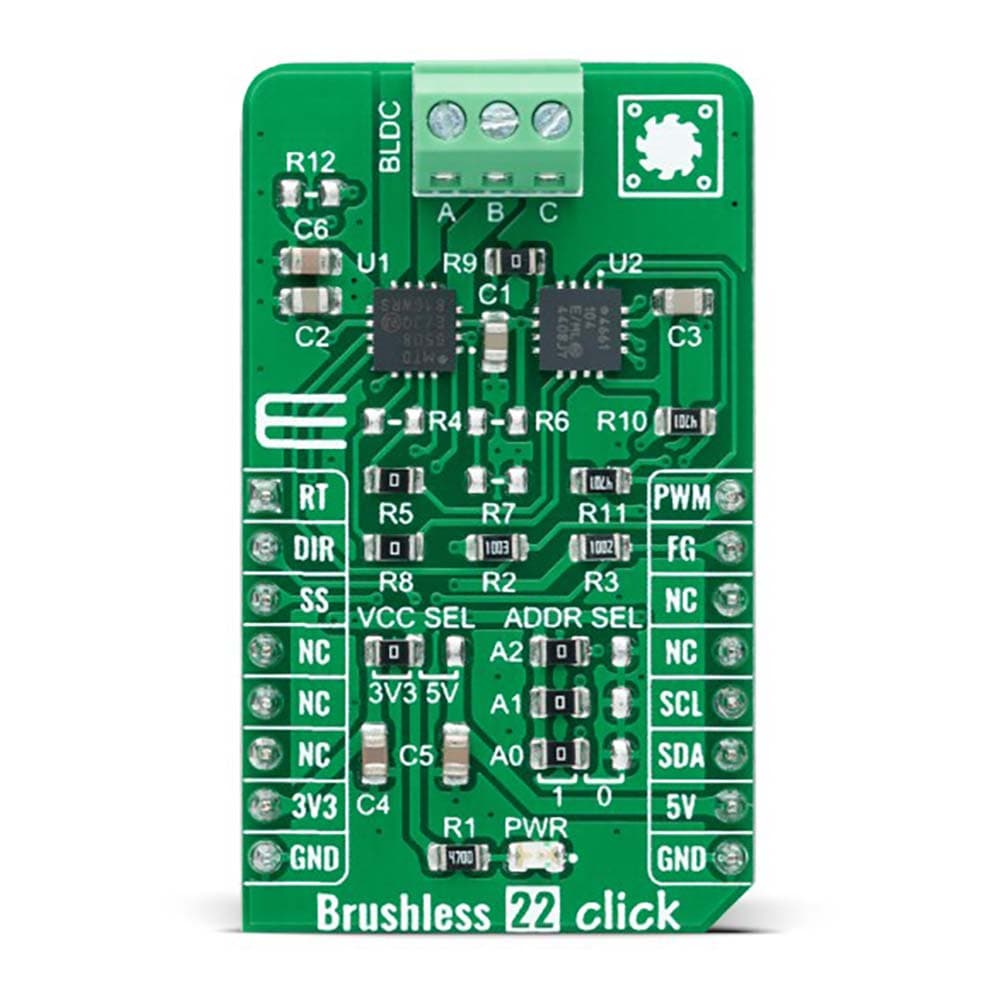
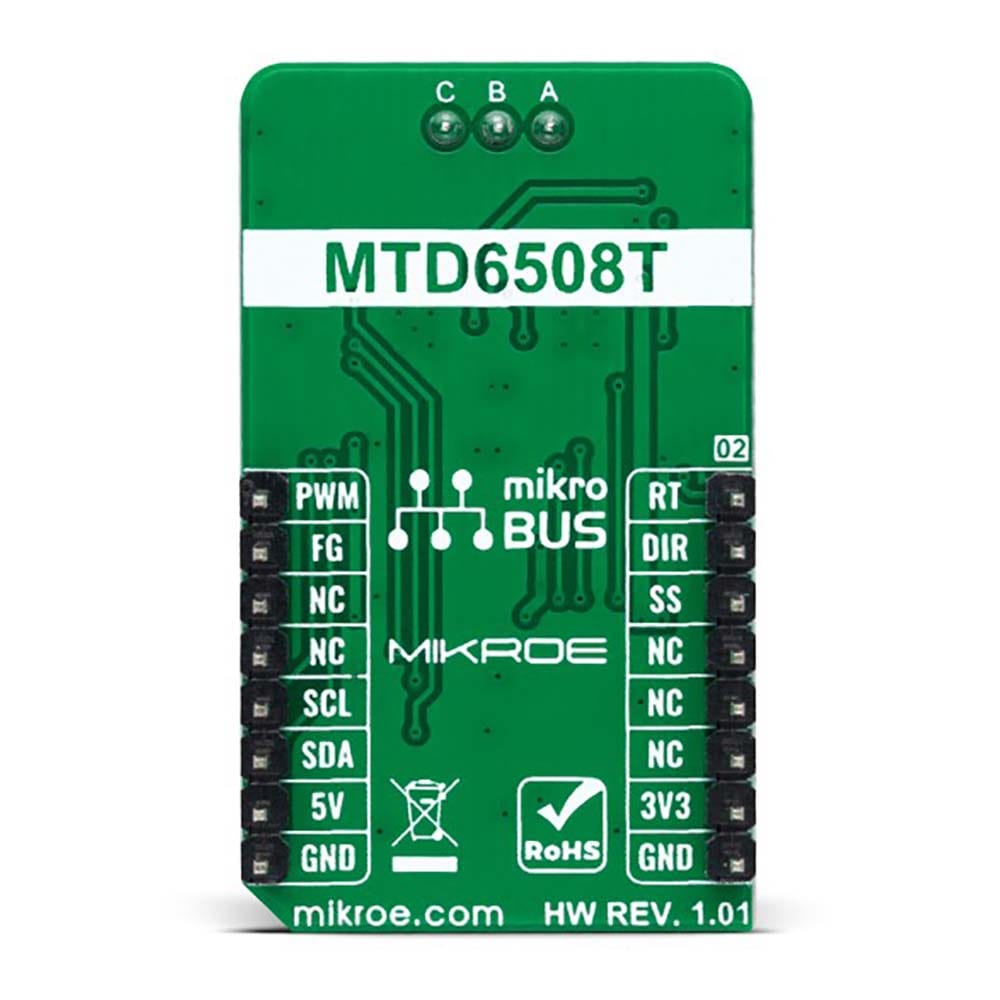
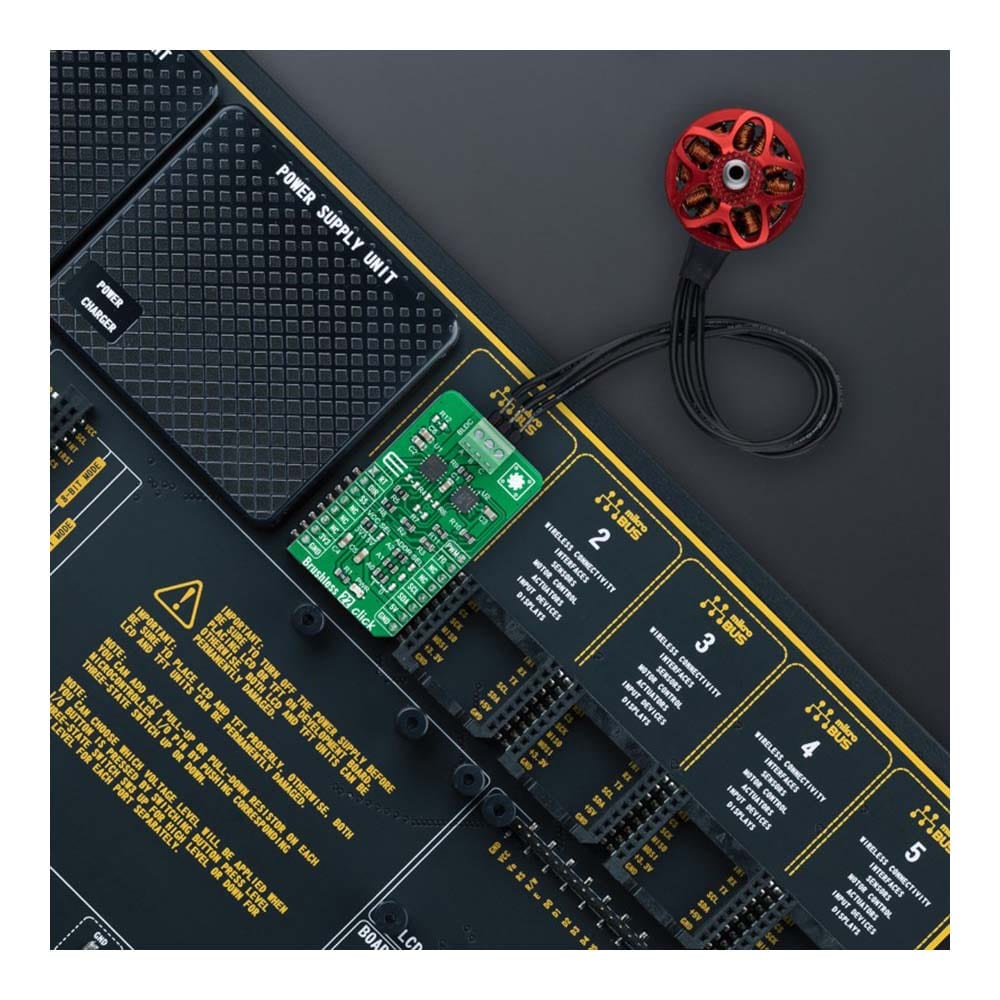
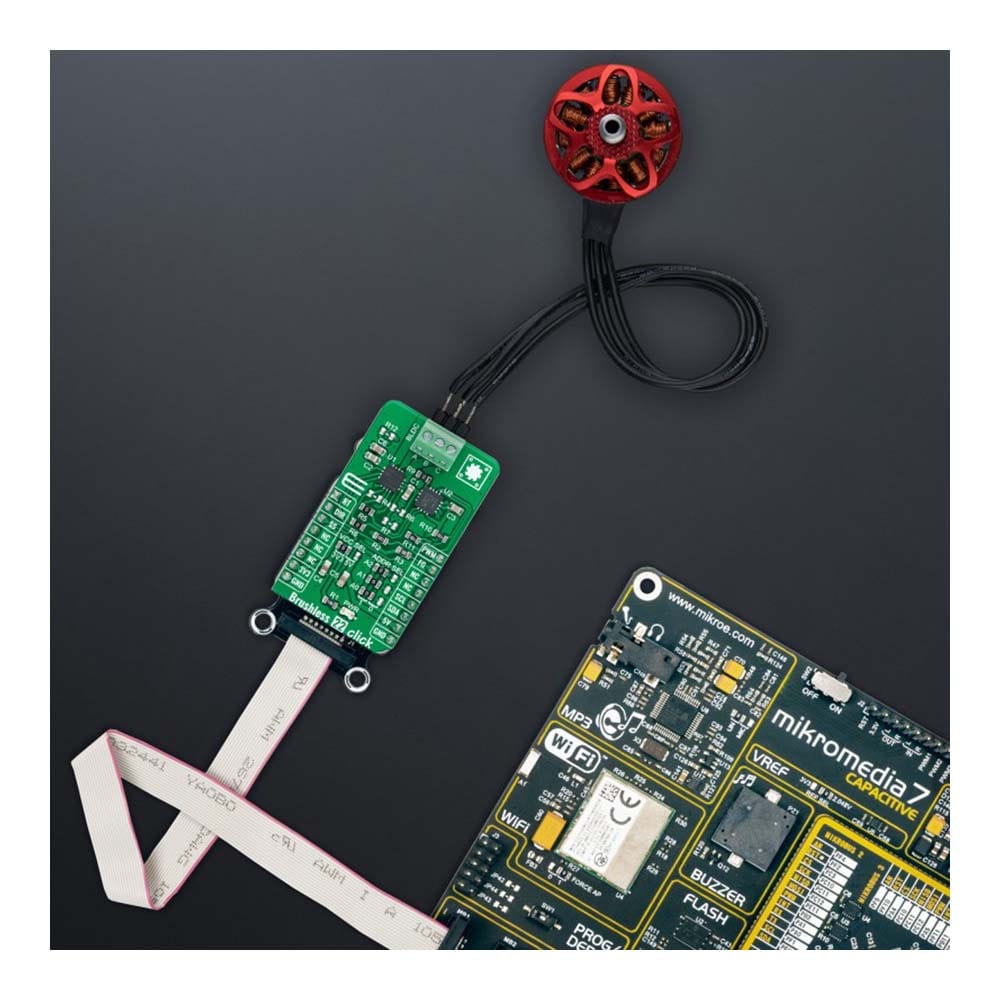
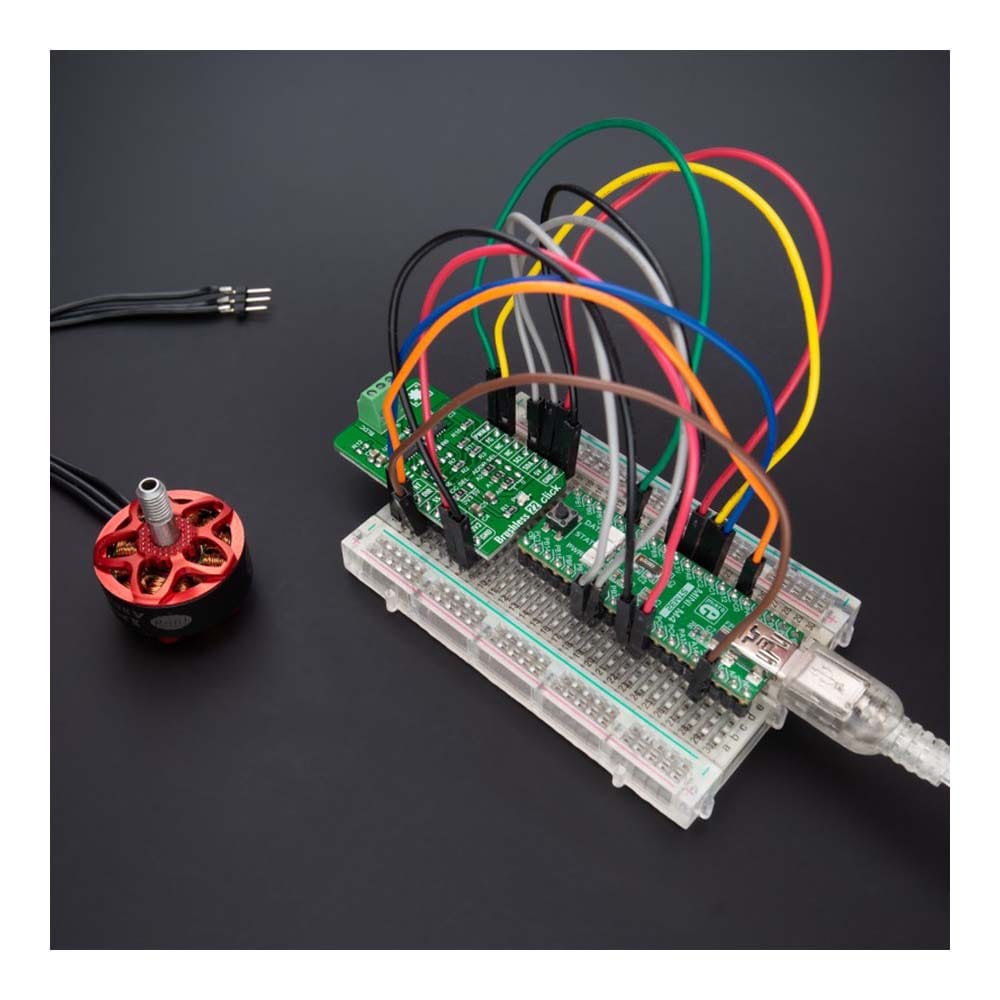
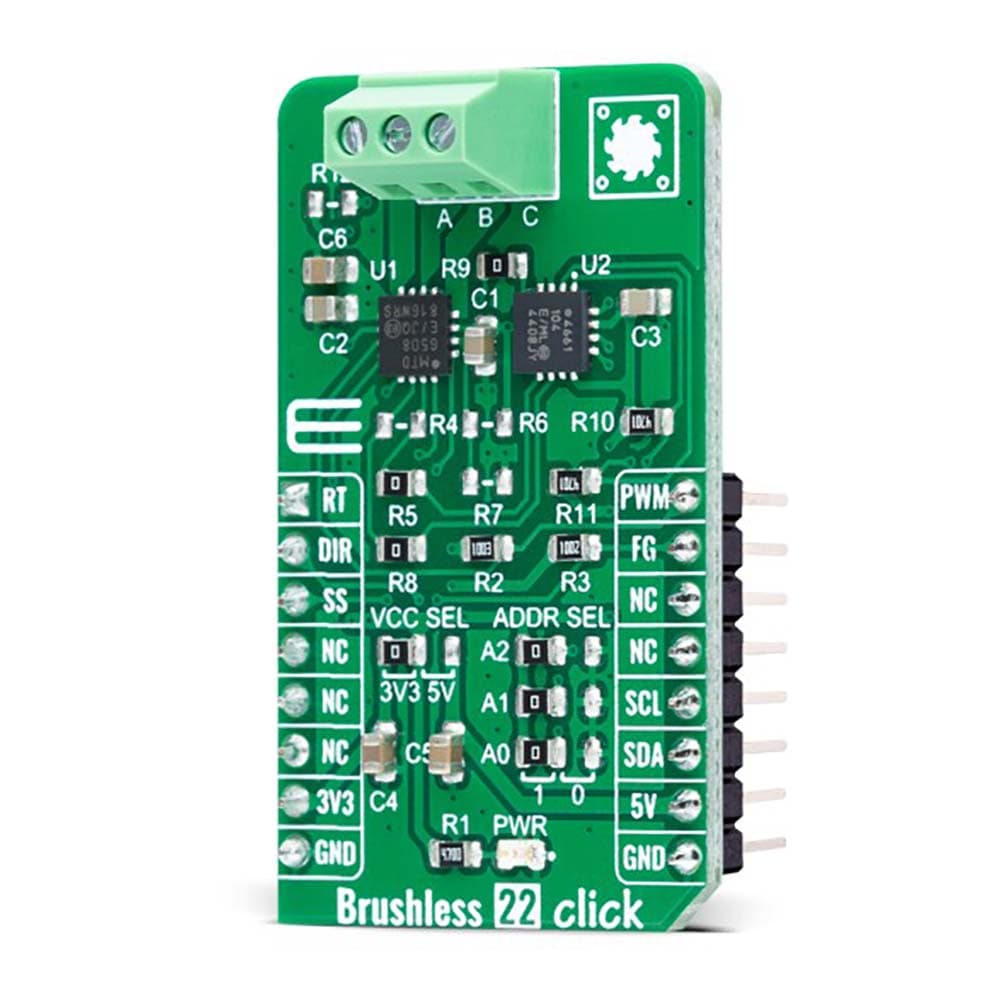
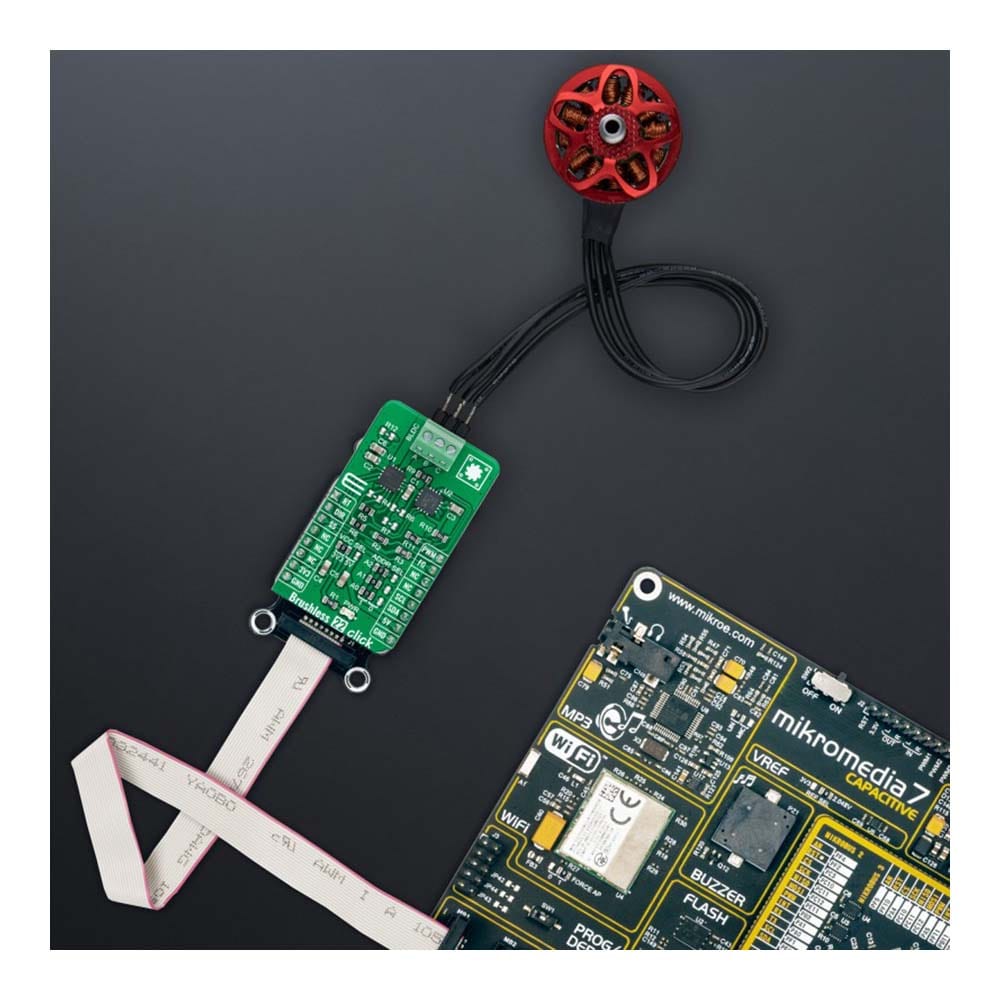
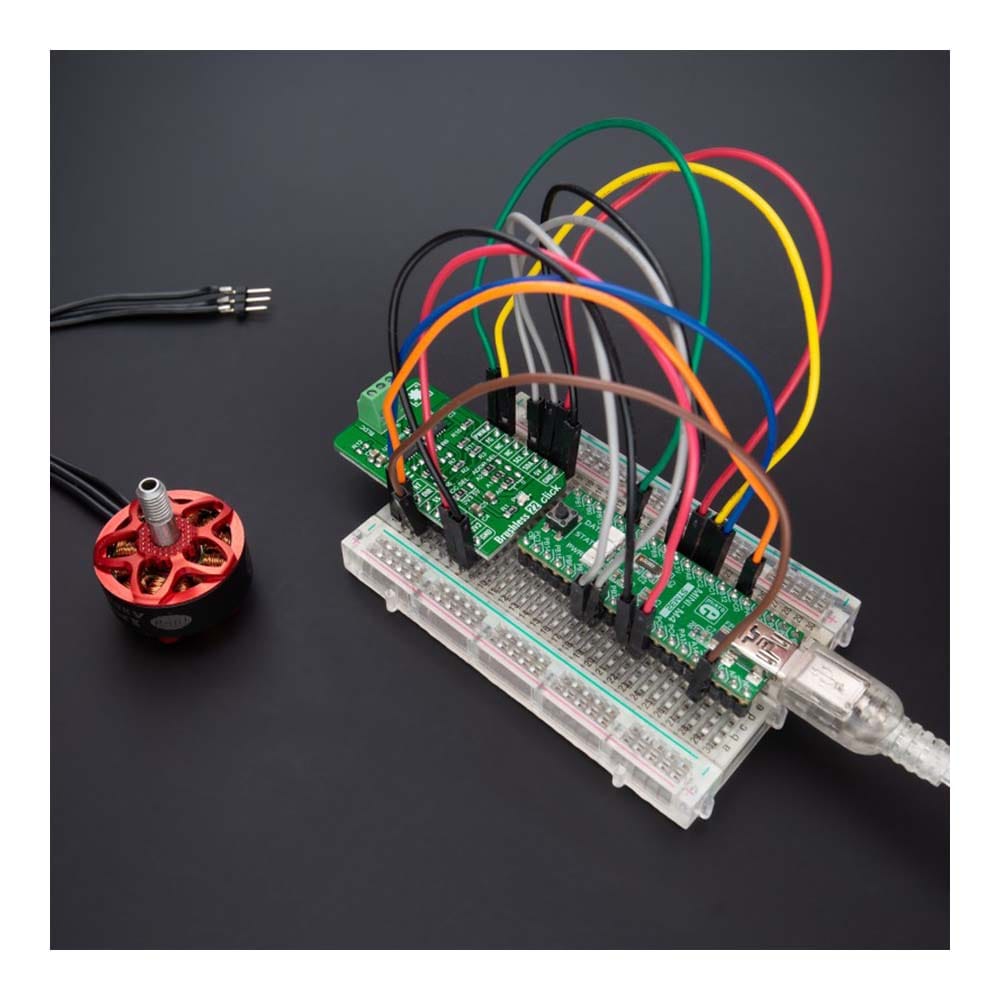
The Brushless 22 Click Board™ is a compact add-on board suitable for controlling brushless DC (BLDC) motors with any MCU. This board features the MTD6508, a 3-phase full-wave sensor-less driver for BLDC motors from Microchip Technology. It features 180° sinusoidal drive, high torque output, and silent drive, rated for an operating voltage range including both mikroBUS™ power rails, and comes with speed control achieved through pulse-width modulation (PWM). Besides, it features several diagnostic circuits and drive-control functions such as motor lock protection, overcurrent limitation, and thermal shutdown protection. This Click board™ makes the perfect solution for home appliances and industrial equipment, such as cooling fans.
The Brushless 22 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
La carte Brushless 22 Click Board™ est une carte complémentaire compacte adaptée au contrôle des moteurs à courant continu sans balais (BLDC) avec n'importe quel microcontrôleur. Cette carte est équipée du MTD6508, un pilote triphasé à onde complète sans capteur pour moteurs BLDC de Microchip Technology. Elle est dotée d'un entraînement sinusoïdal à 180°, d'un couple de sortie élevé et d'un entraînement silencieux, conçu pour une plage de tension de fonctionnement comprenant les deux rails d'alimentation mikroBUS™, et est livrée avec un contrôle de vitesse obtenu par modulation de largeur d'impulsion (PWM). En outre, elle comprend plusieurs circuits de diagnostic et fonctions de contrôle d'entraînement telles que la protection contre le verrouillage du moteur, la limitation de surintensité et la protection contre l'arrêt thermique. Cette carte Click™ est la solution parfaite pour les appareils électroménagers et les équipements industriels, tels que les ventilateurs de refroidissement.
La carte Click Board™ Brushless 22 est supportée par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette carte Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4995
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027389382
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.