







Mikroelektronika d.o.o.
Carte de clic pour moteur à courant continu 16
Carte de clic pour moteur à courant continu 16
SKU: MIKROE-4333
Impossible de charger la disponibilité du service de retrait

Overview
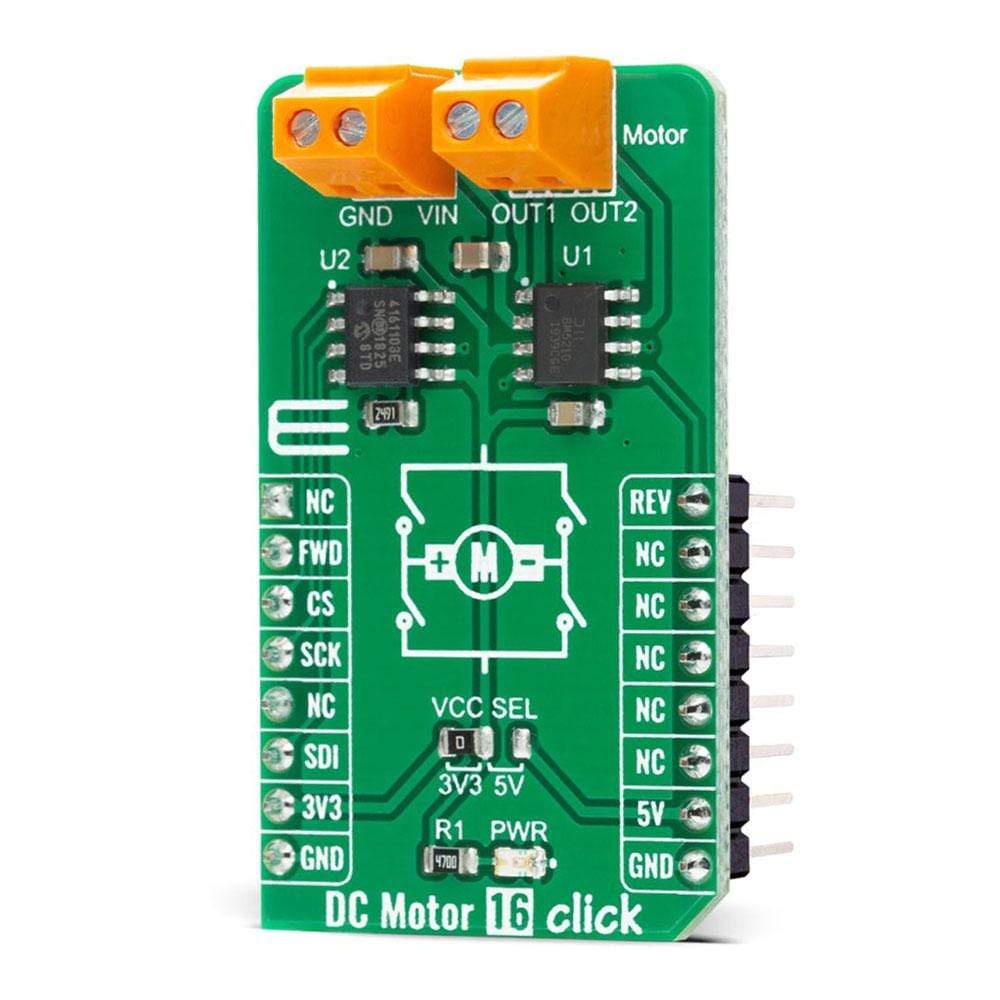
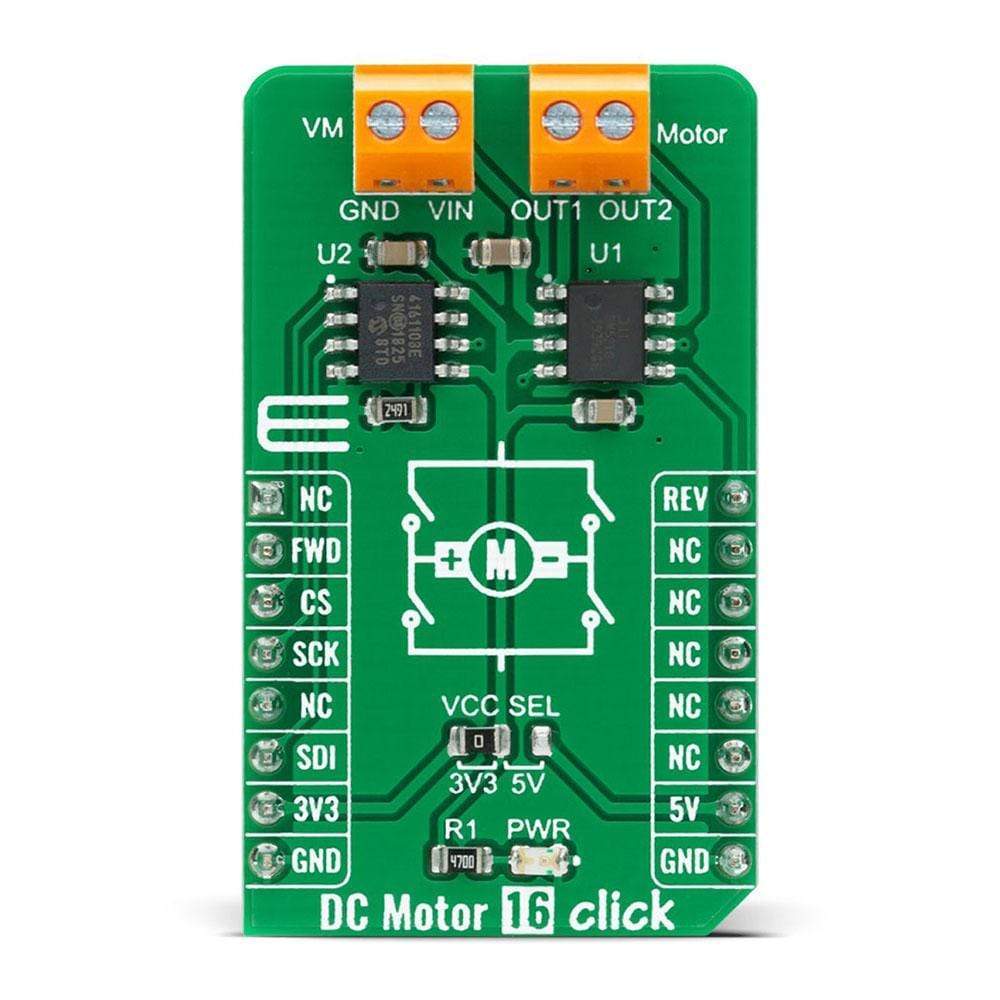
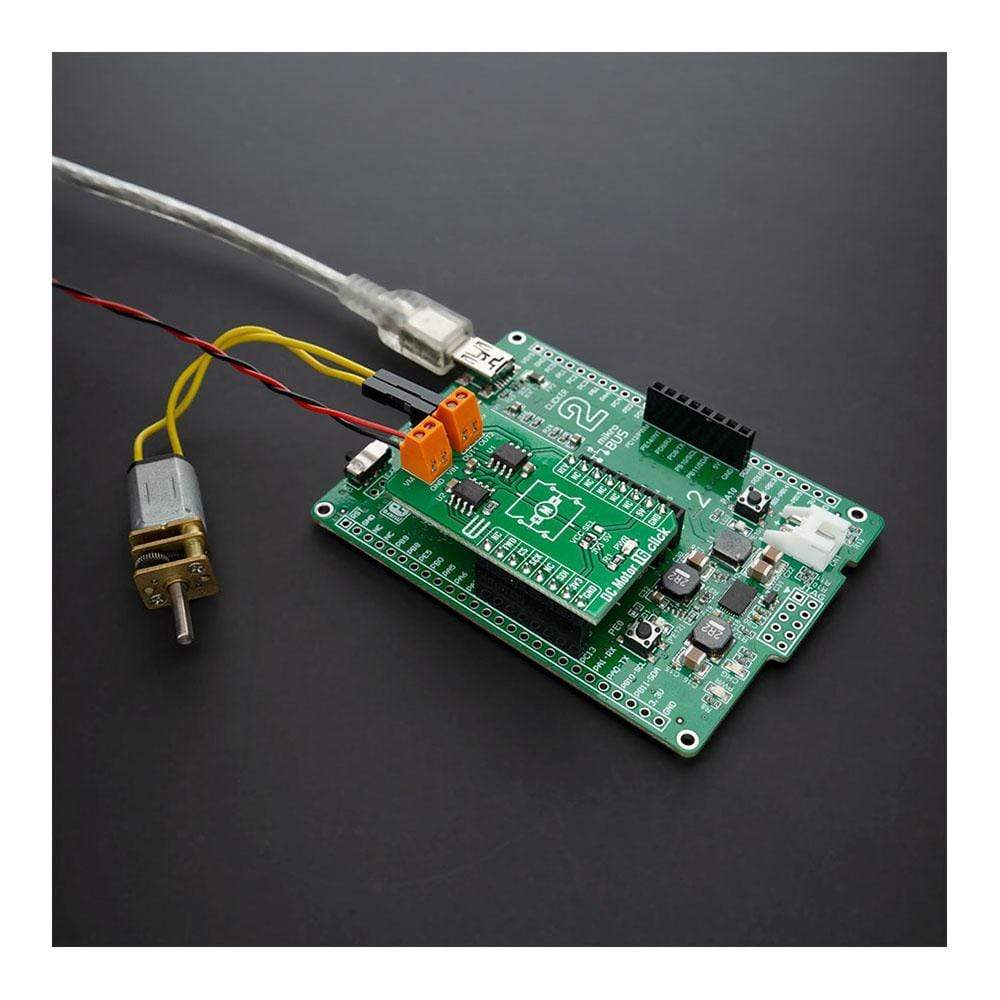
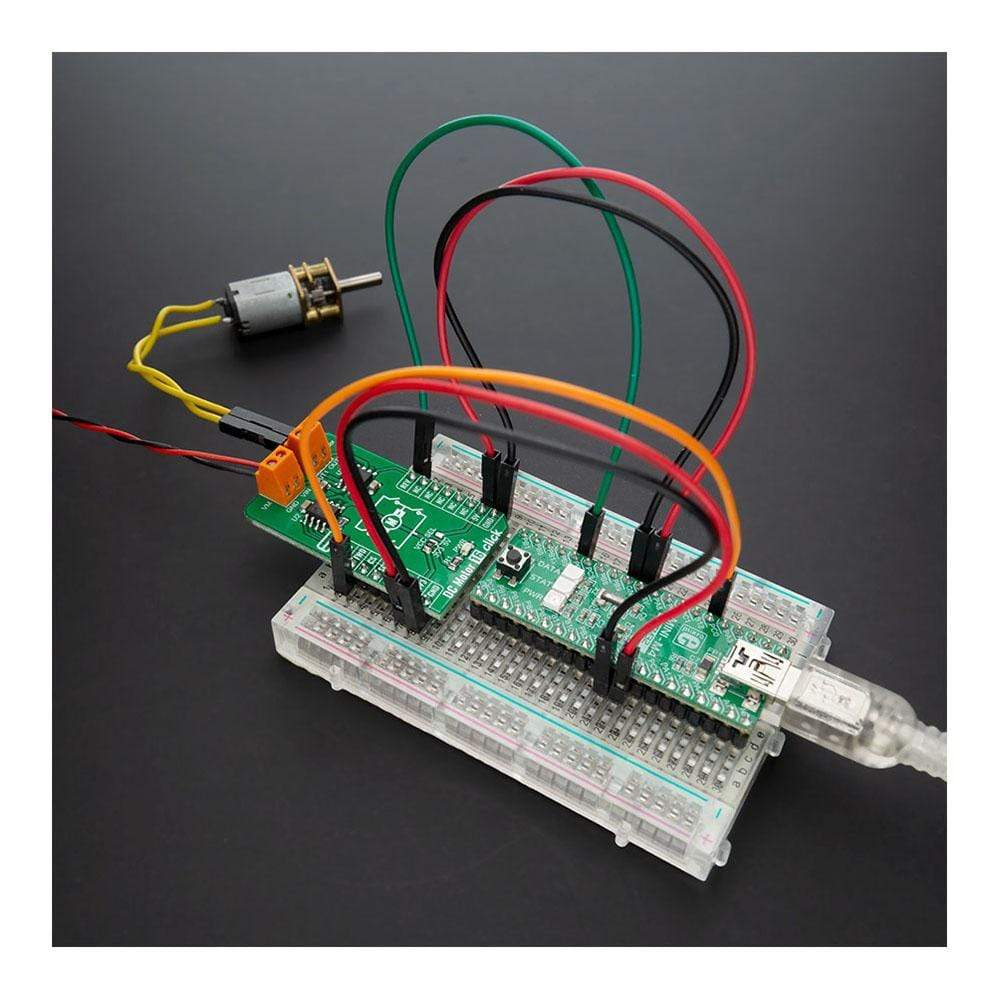
The DC Motor 16 Click Board™ is a compact add-on board that contains a high-performance single phase reversible DC motor drive with speed control. This board features the ZXBM5210, a fully-featured DC motor drive solution with an average current capability of up to 700mA from Diodes Incorporated. The ZXBM5210 has several modes of operations selected by two GPIO pins, has a wide supply voltage range from 3V to 18V, and has low power consumption. It possesses three speed-control modes, and provides under/over voltage protection, over current limit, and thermal shutdown capability. This Click Board™ is suitable for a reversible DC motor and actuator drive, remote control motorized toy applications, home appliances, handheld power tools, and many more.
The DC Motor 16 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Le DC Motor 16 Click Board™ est une carte complémentaire compacte qui contient un variateur de moteur CC réversible monophasé hautes performances avec contrôle de vitesse. Cette carte comprend le ZXBM5210, une solution de variateur de moteur CC complète avec une capacité de courant moyenne allant jusqu'à 700 mA de Diodes Incorporated. Le ZXBM5210 dispose de plusieurs modes de fonctionnement sélectionnés par deux broches GPIO, d'une large plage de tension d'alimentation de 3 V à 18 V et d'une faible consommation d'énergie. Il possède trois modes de contrôle de vitesse et offre une protection contre les sous-tensions/surtensions, une limite de surintensité et une capacité d'arrêt thermique. Ce Click Board™ convient à un variateur de moteur et d'actionneur CC réversible, aux applications de jouets motorisés télécommandés, aux appareils électroménagers, aux outils électriques portatifs et bien d'autres.
Le DC Motor 16 Click Board™ est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Ce Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé de la prise mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4333
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027380716
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.