







Mikroelektronika d.o.o.
Carte de clic IMU 6DOF 13
Carte de clic IMU 6DOF 13
SKU: MIKROE-4228
Impossible de charger la disponibilité du service de retrait

Overview
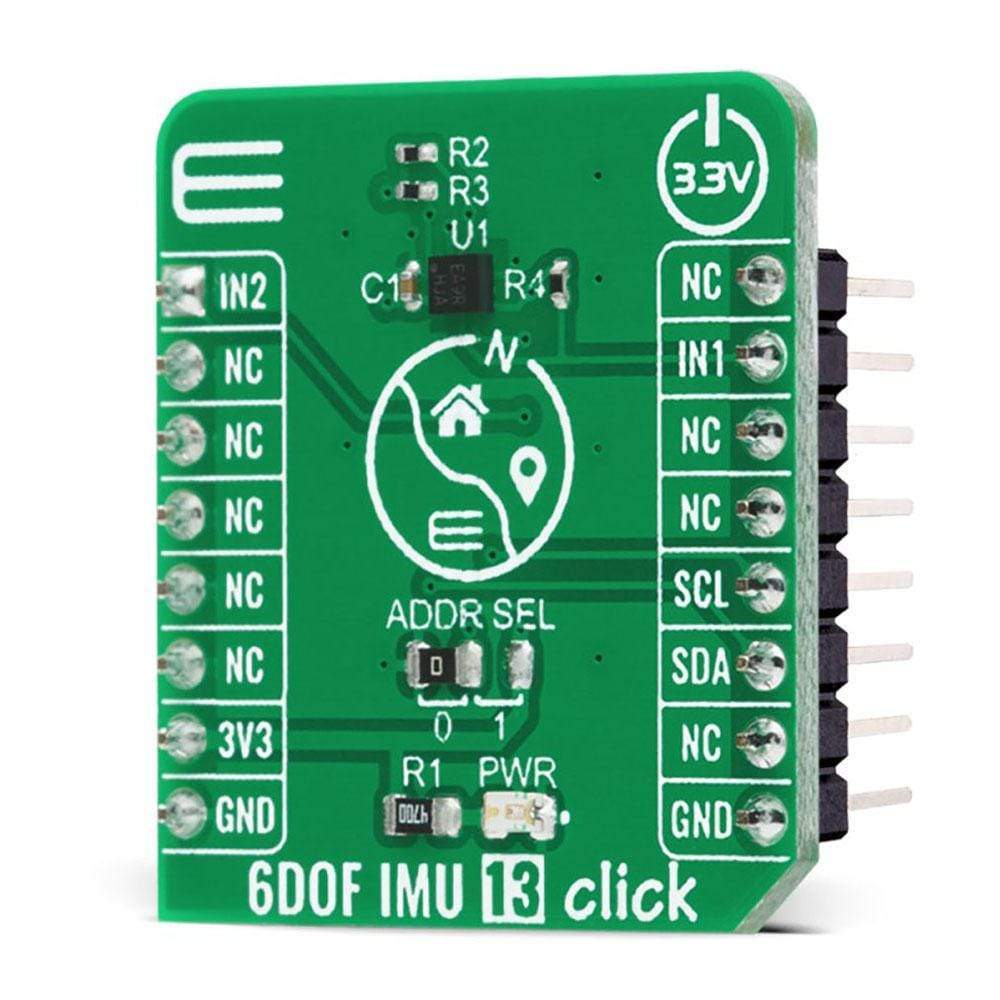
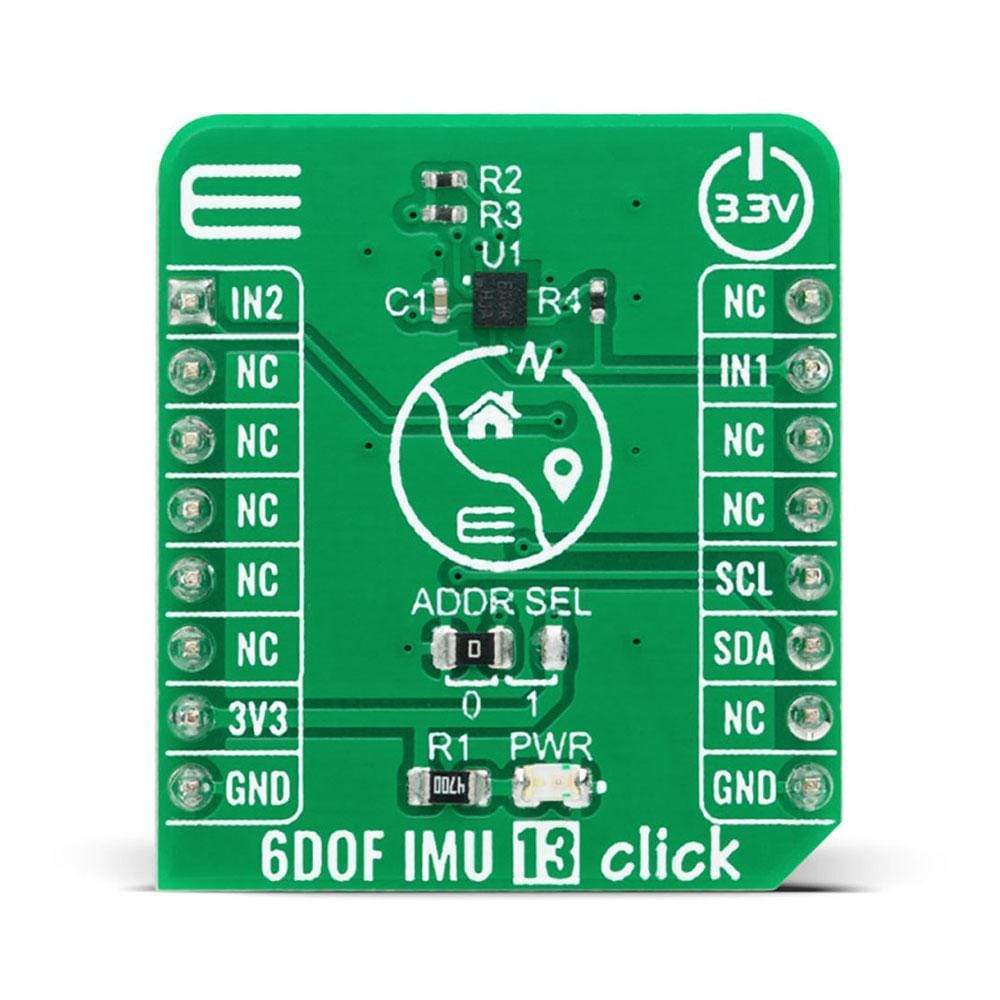
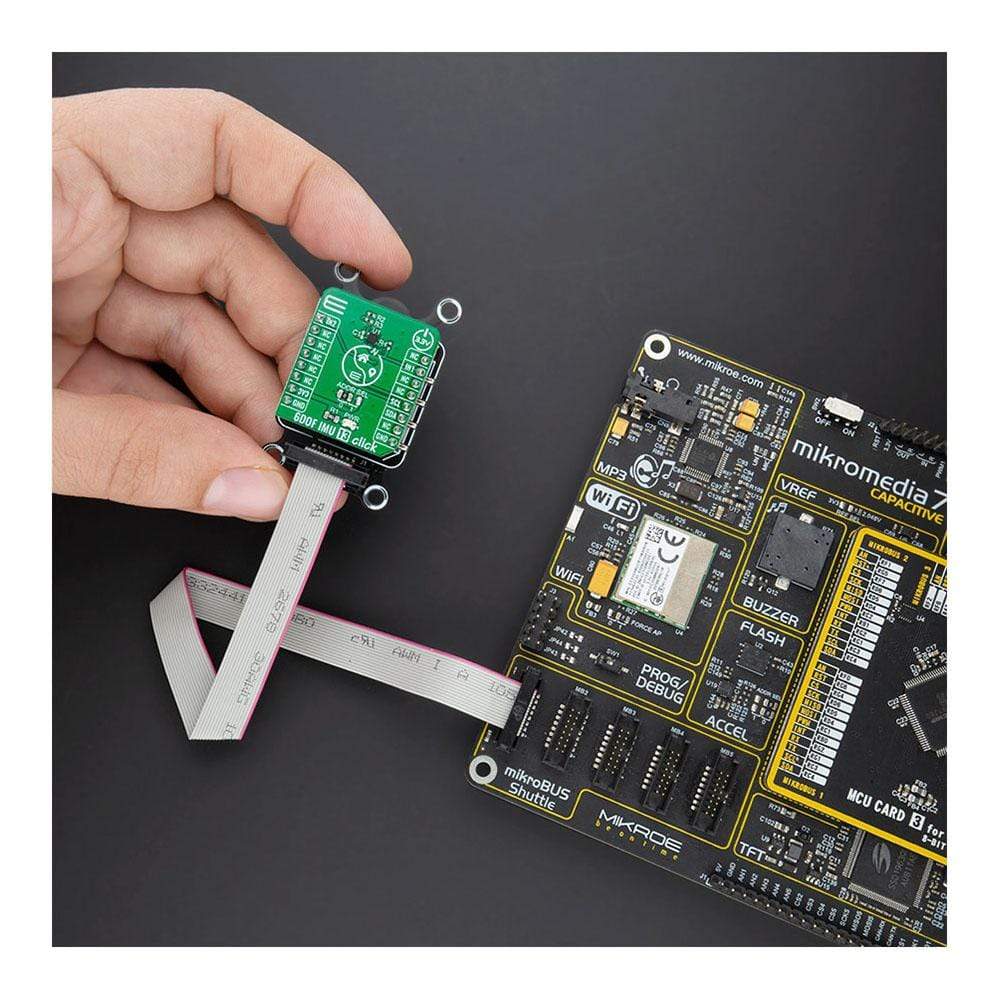
The 6DOF IMU 13 Click Board™ is a compact add-on board that contains an eCompass that consists of a 3-axis linear accelerometer and a 3-axis magnetic field sensor. This board features the MC6470, an accelerometer and magnetometer for a 6 DoF (6 Degrees of Freedom) sensor solution, from mCube Inc. It has a linear acceleration full-scale range of ±16g and a low noise magnetic sensor with up to 0.15μT magnetic field resolution, with a single I2C interface available to separately control magnetometer and accelerometer functions, enabling independent operation of functions for application flexibility. This Click Board™ is an excellent choice for applications requiring high-precision directional pointing such as map orientation, virtual reality data overlay, enhanced navigation, and gyroscope replacement.
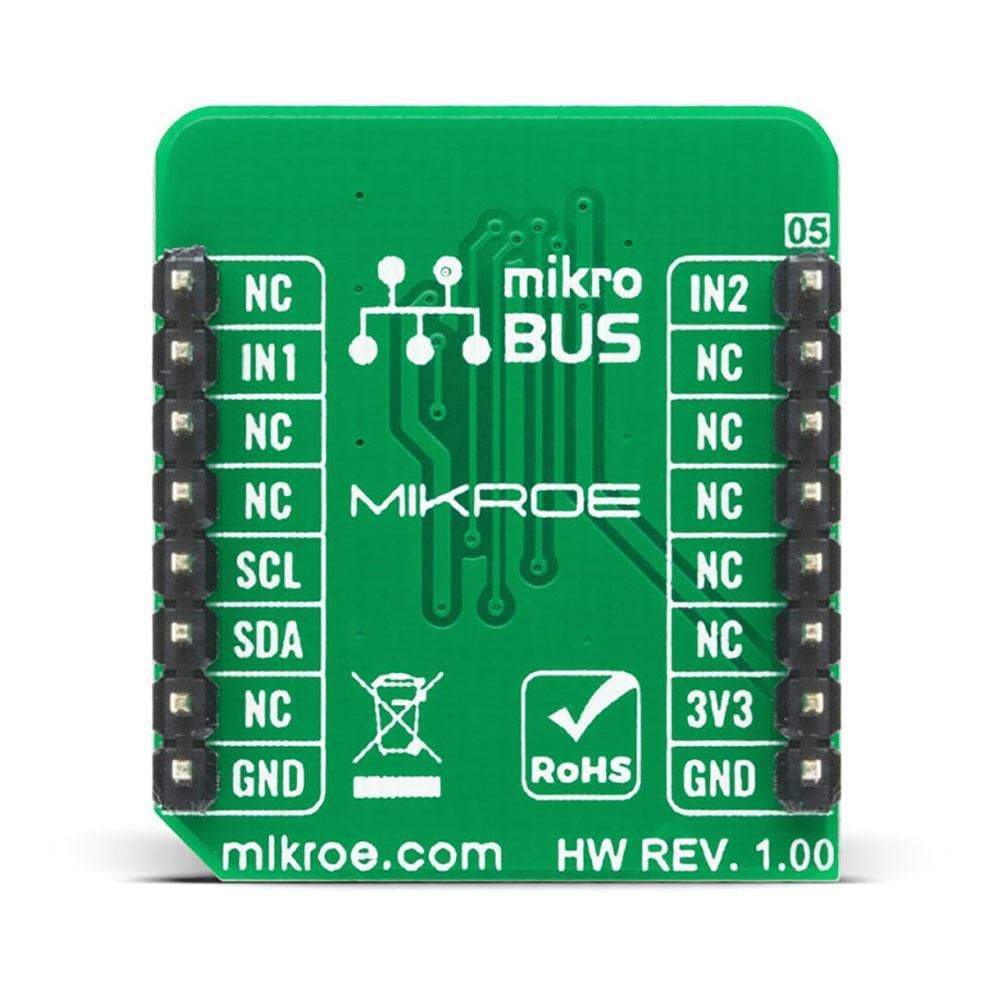
The 6DOF IMU 13 Click is supported by a mikroSDK-compliant library, which includes functions that simplify software development. This Click Board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
La carte Click Board™ 6DOF IMU 13 est une carte complémentaire compacte qui contient une boussole électronique composée d'un accéléromètre linéaire à 3 axes et d'un capteur de champ magnétique à 3 axes. Cette carte comprend le MC6470, un accéléromètre et un magnétomètre pour une solution de capteur à 6 degrés de liberté (6 DoF), de mCube Inc. Il dispose d'une plage d'accélération linéaire à pleine échelle de ±16 g et d'un capteur magnétique à faible bruit avec une résolution de champ magnétique allant jusqu'à 0,15 μT, avec une seule interface I2C disponible pour contrôler séparément les fonctions de magnétomètre et d'accéléromètre, permettant un fonctionnement indépendant des fonctions pour une flexibilité d'application. Cette carte Click Board™ est un excellent choix pour les applications nécessitant un pointage directionnel de haute précision telles que l'orientation de la carte, la superposition de données de réalité virtuelle, la navigation améliorée et le remplacement du gyroscope.
L' IMU 6DOF 13 Click est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4228
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.017 kg
|
| Other | |
EAN |
8606027380280
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.