

Mikroelektronika d.o.o.
Tableau de clic 9DOF 3
Tableau de clic 9DOF 3
SKU: MIKROE-4153
Impossible de charger la disponibilité du service de retrait


Overview
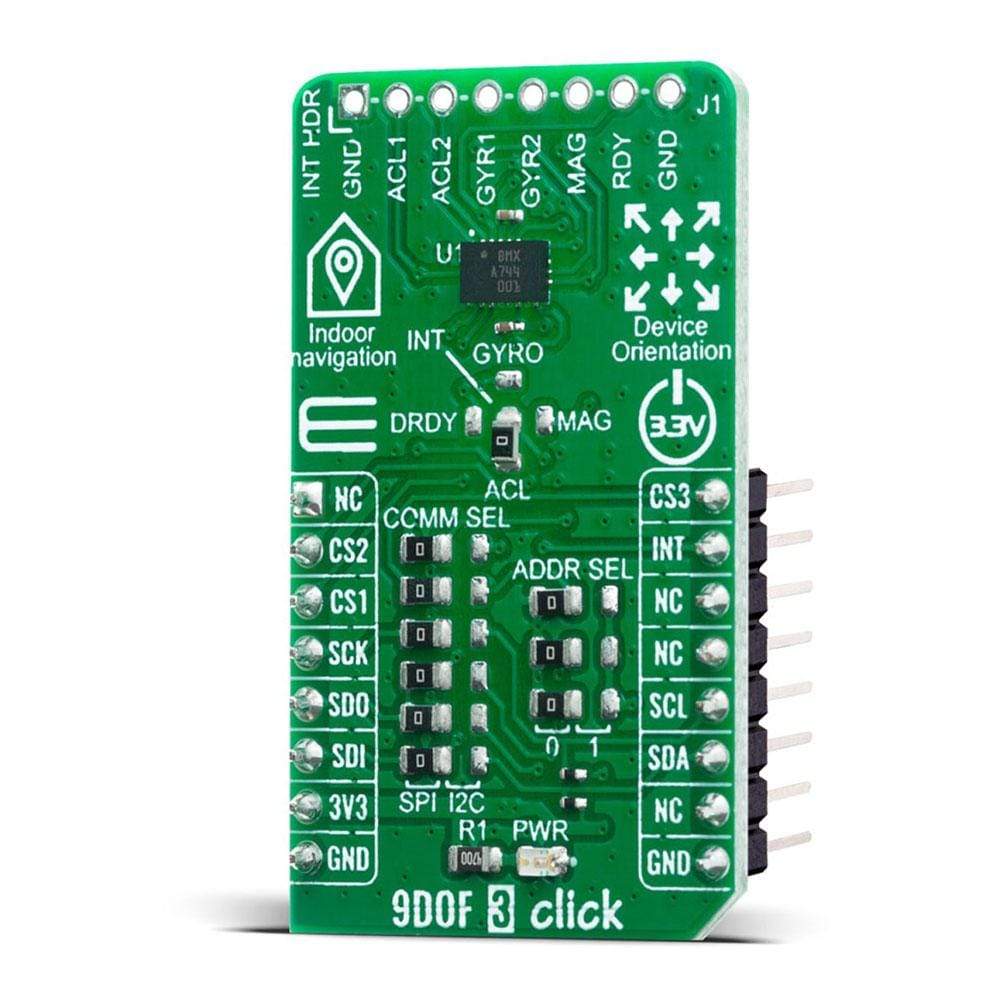
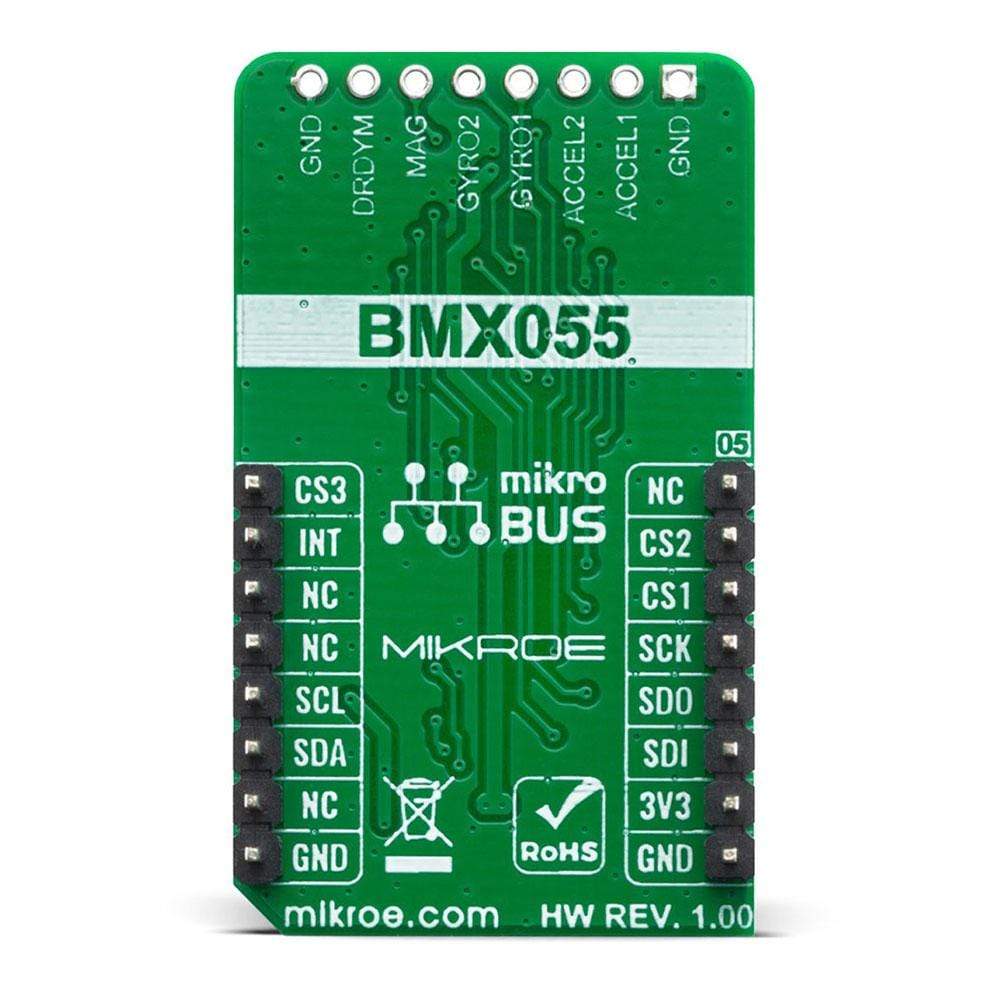
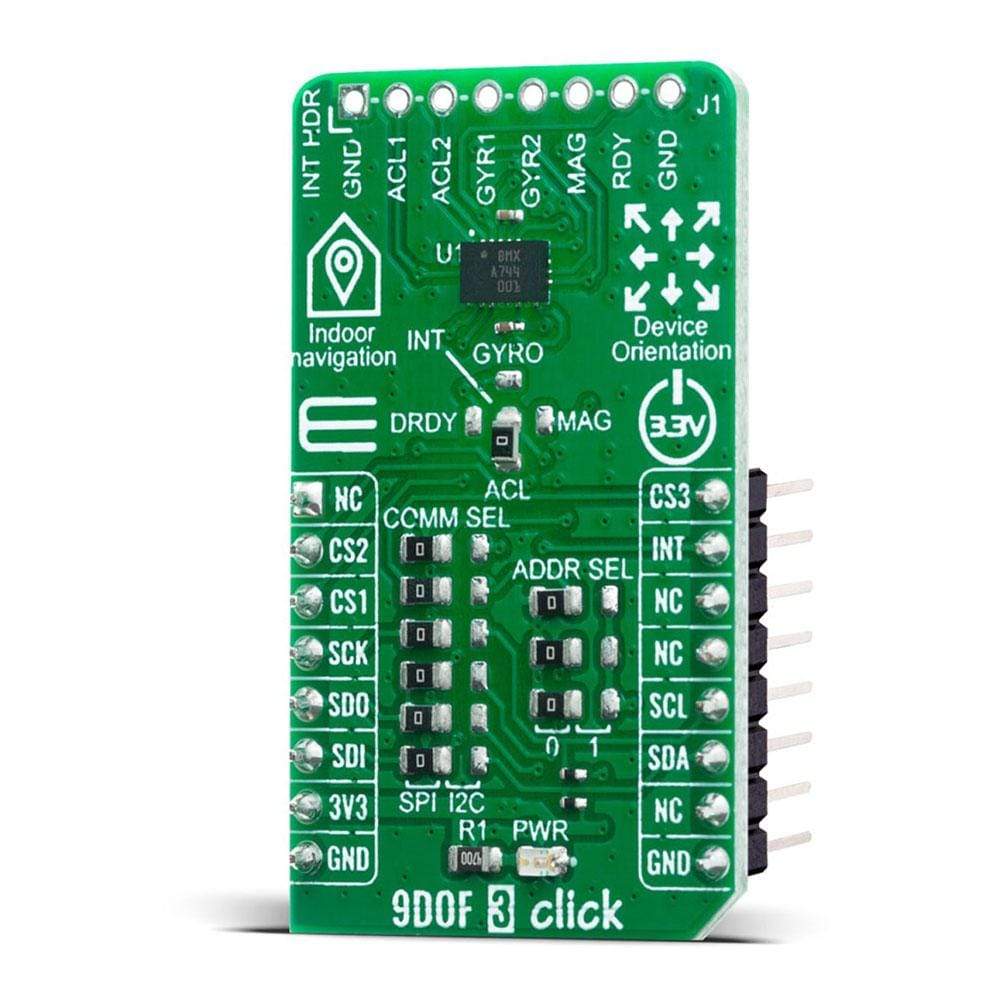
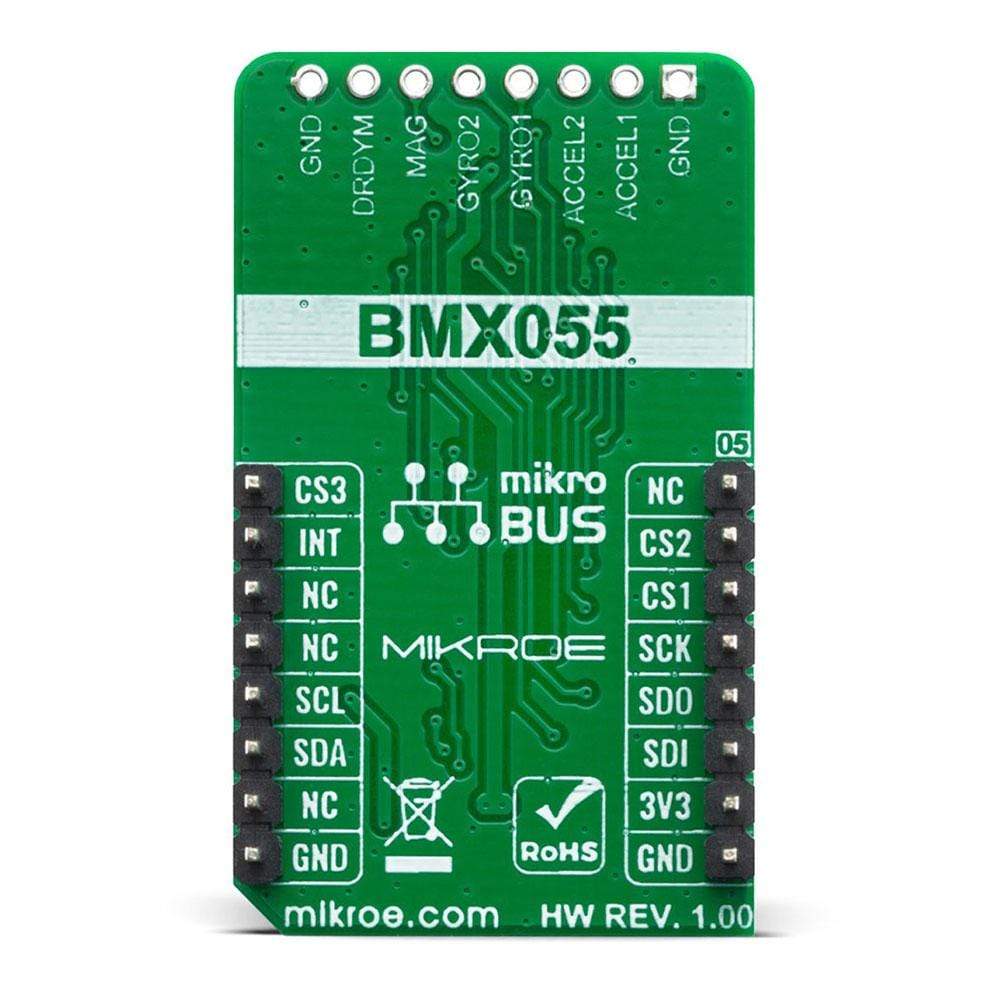
The 9DOF 3 Click Board™ introduces the BMX055, a small-scale absolute orientation sensor in the class of low-noise 9-axis measurement units, from Bosch Sensortec. It comprises the full functionality of a triaxial, low-g acceleration sensor, a triaxial angular rate sensor and a triaxial geomagnetic sensor. All three sensor components of the BMX055 can be operated and addressed independently from each other.
On top, the BMX055 integrates a multitude of features that facilitate its use especially in the area of motion detection applications, such as device orientation measurement, gaming, HMI or menu browser control. The 9DOF 3 Click Board™ offers both SPI and I2C digital interfaces for easy and fast system integration.
Downloads
Le 9DOF 3 Click Board™ présente le BMX055, un capteur d'orientation absolue de petite taille de la catégorie des unités de mesure à 9 axes à faible bruit de Bosch Sensortec. Il comprend toutes les fonctionnalités d'un capteur d'accélération triaxial à faible g, d'un capteur de vitesse angulaire triaxial et d'un capteur géomagnétique triaxial. Les trois composants du capteur BMX055 peuvent être utilisés et adressés indépendamment les uns des autres.
De plus, le BMX055 intègre une multitude de fonctionnalités qui facilitent son utilisation notamment dans le domaine des applications de détection de mouvement, telles que la mesure de l'orientation des appareils, les jeux, l'IHM ou le contrôle du navigateur de menus. Le 9DOF 3 Click Board™ offre des interfaces numériques SPI et I2C pour une intégration système simple et rapide.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4153
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018717811
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.